安卓智能手机GNSS单点测速性能评估
2021-06-19 08:15张嘉骅陶贤露
导航定位学报 2021年3期
张嘉骅,陶贤露,朱 锋
(武汉大学 测绘学院,武汉 430079)
0 引言
使用低成本定位设备获取高精度定位结果,是当前大众位置服务的主要发展趋势。文献[1]详细总结了现有的低成本高精度定位技术。随着智能手机的大规模普及,基于智能终端的位置服务成为大众位置服务的主要组成部分。文献[2]通过实验,首次证明了基于智能手机天线得到的全球卫星导航系统(global navigation satellite system,GNSS)观测值,可以获取厘米级的高精度定位解。如何基于安卓设备获取亚米级、厘米级的高精度定位解,诸多学者主要从原始观测数据误差特性分析[3-4]和相位差分定位技术[5-7]两大方面展开了一系列研究。安卓智能设备通过伪距平滑、滤波技术可获取亚米级精度的定位解[8-9],相位差分定位解精度达到分米级甚至厘米级[10-11]。速度作为描述物体运动状态的一项重要参数,在 GNSS观测值噪声建模、低成本高精度定位算法和GNSS/惯性导航系统(inertial navigation system,INS)组合导航等领域具有重要的应用价值。相比高精度定位技术,基于安卓智能设备GNSS测速方面的研究较少。本文使用两台安卓智能手机开展静态、动态数据采集实验,采用多普勒频移、载波相位中心差分和载波相位历元间差分(timedifferenced carrier phase, TDCP)三种测速方法,评估了安卓智能手机在不同使用场景中的测速精度。
1 GNSS单点测速原理
1.1 多普勒频移单点测速
基于伪距观测方程可以得出其微分式为

式中:为伪距变化率;为卫地距变化率;c为光速;δt˙r为接收机时钟频漂;δt˙s为卫星时钟频漂;分别为电离层、对流层时延误差变化率。
伪距变化率可通过多普勒频移观测值获得,即

式中:λ为卫星信号波长;D为多普勒频移原始观测值。
卫地距变化率[12]可表示为

式中:Vs为卫星运行速度;Vr为定位载体的三维速度;e为卫星在接收机处的单位观测矢量。
将式(2)、式(3)代入式(1)得

式(4)中,等号左边为待求解的4个未知参数,即接收机三维速度与接收机时钟频漂等效距离误差;等号右边的卫星运行速度与卫星时钟频漂可通过导航星历解算;在采用高采样率时,大气时延误差变化率可忽略不计。
1.2 载波相位中心差分测速
载波相位中心差分测速与多普勒频移测速的区别在于获取伪距变化率的方式不同,伪距变化率可通过载波相位观测值得到,即
式中:φtk-1为tk-1时刻的载波相位观测值;φtk+1为tk+1时刻的载波相位观测值。
1.3 载波相位历元间差分测速
载波相位观测方程为

式中:φ为载波相位观测值;P为卫地距;δtr为接收机钟差;δts为卫星钟差;I、T分别为电离层、对流层延迟误差;N为整周模糊度;Lε为多路径效应和载波相位观测噪声的综合误差。
假设前后观测历元无周跳,则载波相位观测方程历元间差分式为

式中:φtk-1为tk-1时刻的载波相位观测值;φtk为tk时刻的载波相位观测值;Δ为历元间单差运算因子。
假设tk-1和tk时刻的接收机位置分别为(Xk-1Yk-1Zk-1)、(XkYkZk),前后历元接收机位置变化量为(ΔXΔYΔZ),则有

在短时间内,大气延迟误差变化量可忽略不计,将式(8)代入式(7)并线性化得

k
根据式(9),采用最小二乘法即可求取载体的运动速度。
1.4 数据质量控制
本文对载波相位观测值进行了周跳探测与剔除,不做修复。安卓智能手机搭载低成本GNSS模块和线性极化天线,相比测量型GNSS接收机,载波相位观测值易频繁发生周跳。对于安卓手机,剔除含粗差的观测值不可过多,这样会面临长时间可用卫星数不足,无法有效进行定位测速等问题。为解决上述问题,本文提出了一种周跳探测和抗差估计相结合的方法。具体为:
1)首先采用多普勒频移观测值构造周跳检验量,剔除相位观测值中的大周跳。多普勒频移观测值表示载波相位观测值的瞬时变化率,但又独立于载波相位观测值,其观测值精度不受载波相位发生周跳的影响。某一观测时段内的多普勒频移积分值等于这一时段内载波相位观测值的变化量,可以采用积分多普勒来探测载波相位中的周跳[13]。具体为
式中:Dtk-1为tk-1时刻的多普勒频移原始观测值;Dtk为tk时刻的多普勒频移原始观测值;ε为包含观测值噪声在内的其他误差项的综合影响。
2)剔除大周跳后,根据载波相位历元间三次差残差,采用中国科学院测量与地球物理研究所(Institute of Geodesy and Geophysics, IGG)抗差估计方案,对各历元载波相位观测值进行抗差估计。载波相位历元间高次差呈现出偶然误差特性,当相位发生周跳时,在相位历元间高次差时间序列中,将会出现异常值。受硬件制作工艺的影响,低成本GNSS模块载波相位观测值包含有系统误差。为此,本文将当前观测历元每颗观测卫星的载波相位历元间三次差与其中位数做差,构造当前观测历元的载波相位历元间三次差残差,以削弱硬件系统偏差的影响。根据载波相位历元间三次差残差构造权因子,采用 IGG III抗差估计方案[14]对载波相位观测值进行抗差估计。具体为

根据测速的实际效果,本文建议小米8手机(以下简称为MI8手机)在静态场景中,P10和MI8手机在动态开阔场景中,取k0=1.0,k1=2.5;P10手机在静态场景,P10和MI8手机在动态树荫遮挡场景中,取k0=1.2~1.5,k1=2.5~3.0;P10和 MI8手机在动态高楼遮挡场景中,取k0=1.5,k1=3.0。
2 实验及结果分析
使用华为P10和MI8两部安卓智能手机开展了静态、动态测试实验。其中,华为P10手机搭载单频 GNSS定位芯片且存在占空比机制,MI8手机搭载双频GNSS定位芯片,不存在占空比机制。本文采用安卓应用程序(GnssLogger)来获取安卓手机GNSS原始观测数据。
本文实验算例中,P10手机采用美国全球定位系统(global positioning system, GPS)L1频率信号、俄罗斯格洛纳斯卫星导航系统(global navigation satellite system, GLONASS)G1频率信号、欧盟伽利略卫星导航系统(Galileo navigation satellite system, Galileo)E1频率信号和中国北斗卫星导航系统(BeiDou navigation satellite system,BDS)B1频率信号的单频观测数据参与速度解算;MI8手机采用GPS L1/L5频率信号、Galileo E1/E5a频率信号、日本准天顶卫星系统(quasi-zenith satellite system, QZSS)L1/L5双频信号的观测数据,GLONASS G1频率信号、BDS B1频率信号单频观测数据参与速度解算。MI8手机L5/E5a频段可见卫星数总体较少,考虑环境遮挡和观测数据质量等因素,MI8手机只能在特定运动区域和特定观测时段下,实现双频L1/E1与L5/E5a无电离层组合测速。为此,本文未采用双频L1/E1与L5/E5a无电离层组合进行测速。
2.1 静态实验
静态实验于2019年10月23日在武汉大学测绘学院四楼楼顶进行,连续观测2 h,采样率为1 Hz。卫星截止高度角为10°,信噪比(signal noise ratio,SNR)阈值为20 dB·Hz。静态场景中速度参考真值为零。实验环境及实验设备放置情况如图1所示。
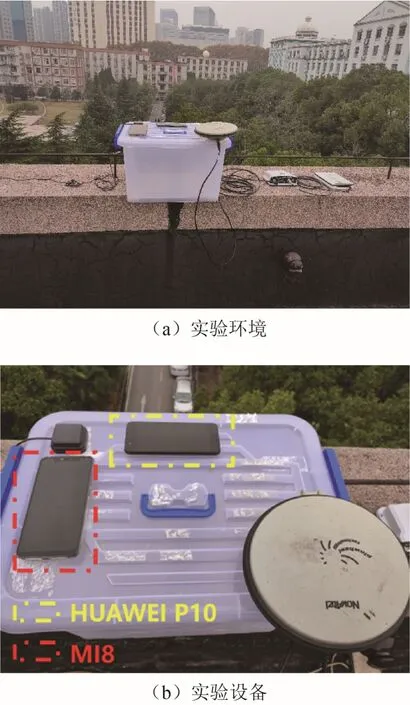
图1 静态实验环境及实验设备放置
图2给出了静态场景中,两部手机观测时段可见卫星数。从图2可以看出,MI8手机可见卫星数时间序列整体比较平稳,P10手机可见卫星数时间序列具有明显的起伏,出现了较大波动。
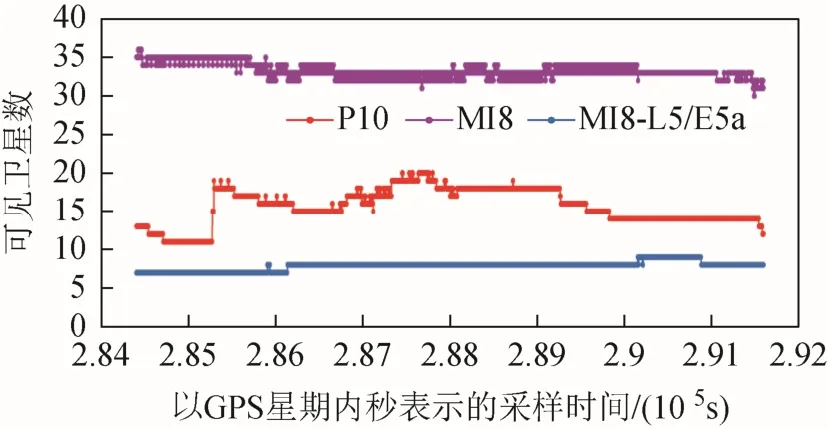
图2 静态场景可见卫星数
在静态场景中,P10手机可见卫星数为11~20颗,平均可见卫星数为 15.6颗。MI8手机可见卫星数为30~36颗,平均可见卫星数为33.3颗。其中,L5/E5a频段可见卫星数为 7~9颗,平均可见卫星数为7.9颗。
基于静态实验原始观测数据,图3给出了静态场景中P10、MI8手机三种测速方法测速误差时间序列。表1给出了P10、MI8手机在静态场景中,以均方根(root mean square, RMS)表示的测速精度的统计值。
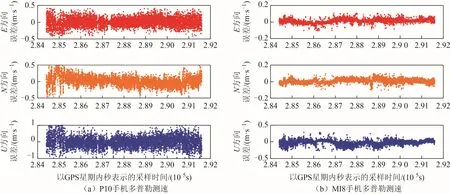
从图3及表 1可以看出,载波相位测速精度明显优于多普勒频移测速。在静态场景中,MI8 手机多普勒频移在水平和垂直方向上的测速精度分别为3.8、7.6 cm/s。TDCP法测速的精度略优于相位中心差分测速的精度。MI8手机TDCP 法在水平和垂直方向上的测速精度分别为7 mm/s、1.2 cm/s。相比 MI8手机,P10 手机静态测速的精度较差。P10手机在静态状态下,开启了占空比[3],影响了观测数据质量,可见卫星数也有所减少。P10手机多普勒频移在水平方向上的测速精度约为2 dm/s,在垂直方向上的测速精度约为3 dm/s。两种载波相位测速法在水平方向上的测速精度约为1 dm/s,在垂直方向上的测速精度约为2 dm/s。

表1 P10、MI8在静态场景下,三种测速方法测速误差RMS统计值 单位:m/s
2.2 动态实验
动态实验于 2019年 10月 25日在武汉大学信息学部操场及周边进行,分为树荫遮挡、开阔和高楼遮挡三个场景。其中开阔场景南北方向在部分时间段内,存在高楼和树荫连续遮挡。使用小推车搭载P10、MI8手机采集动态观测数据,同时搭载诺瓦泰(NovAtel)公司的FSAS-SPAN组合导航系统。用 FSAS-SPAN系统采集数据,采用NovAtel商业软件IE(Inertial Explorer)获取实时动态差分(real-time kinematic, RTK)与INS的组合解,并将其作为智能手机提供运动速度的真值。实验环境以及实验设备放置情况见图4。

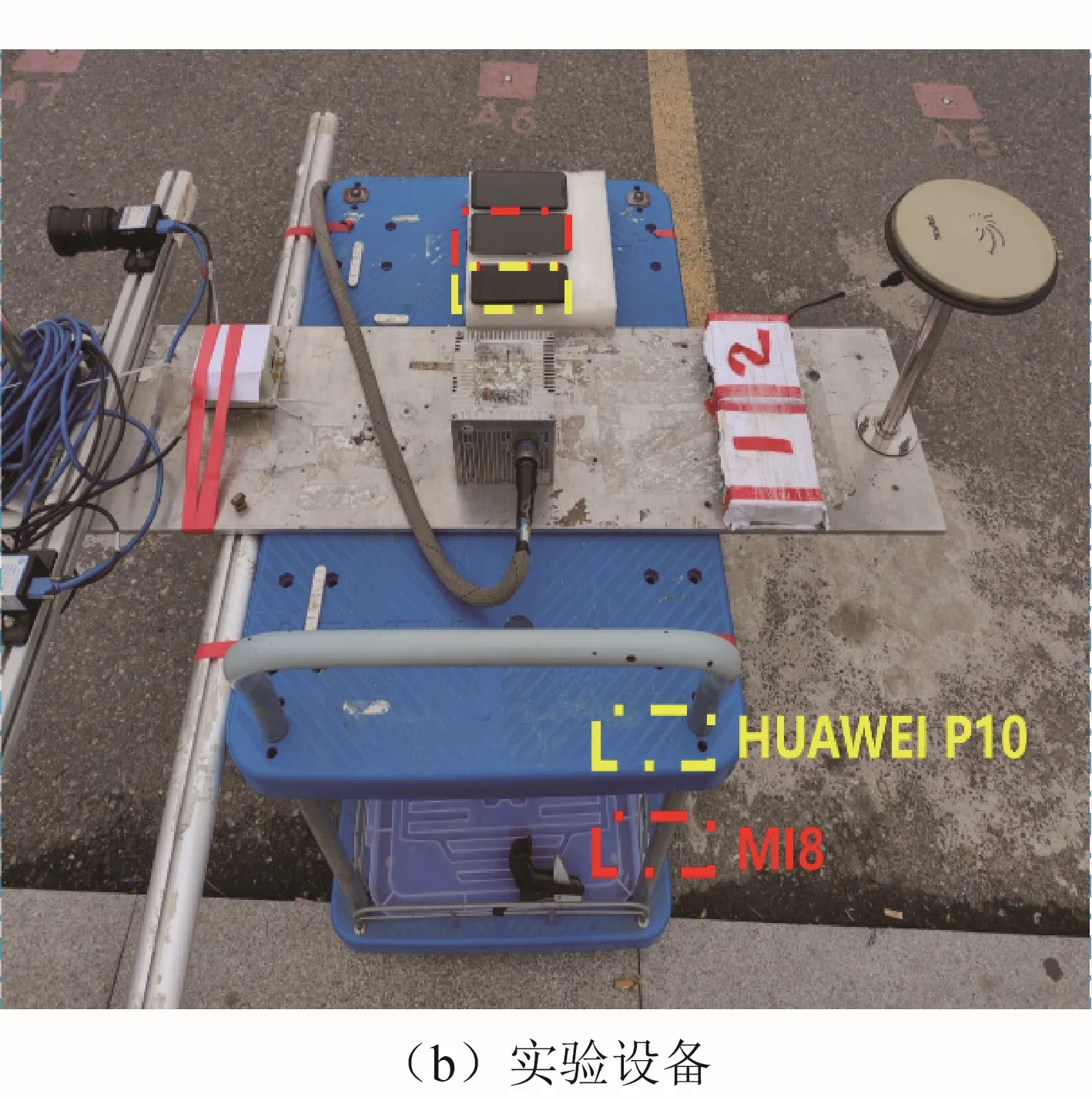
图4 动态实验场景及实验设备放置
图5给出了三种动态场景中,两部手机观测时段内可见卫星数。在动态场景中,P10手机关闭了占空比[3],可见卫星数有所增加。P10手机在动态开阔场景中的可见卫星数时间序列较平稳。在另外两种动态场景中,P10手机的可见卫星数时间序列均出现了不同程度的起伏波动,特别是在高楼遮挡场景中,P10手机的可见卫星数时间序列出现了大波动。MI8手机在三种动态场景中的可见卫星数时间序列整体比较平稳,L5/E5a频段的可见卫星数时间序列,在高楼遮挡场景中出现了明显波动。上述情况表明,P10手机更易受遮挡环境的影响。
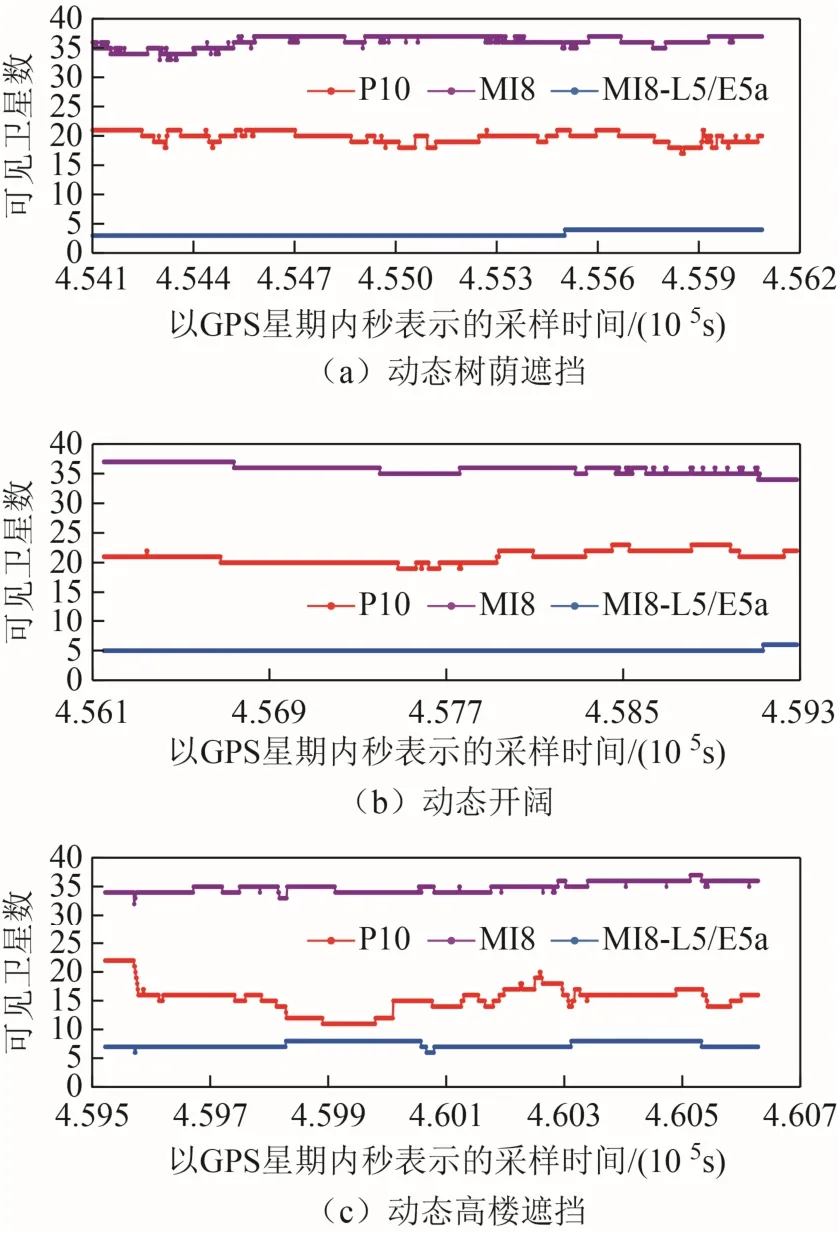
图5 动态场景可见卫星数
图6给出了P10和MI8手机在三种动态场景中,TDCP法测速的位置精度因子(position dilution of precision, PDOP)数值。
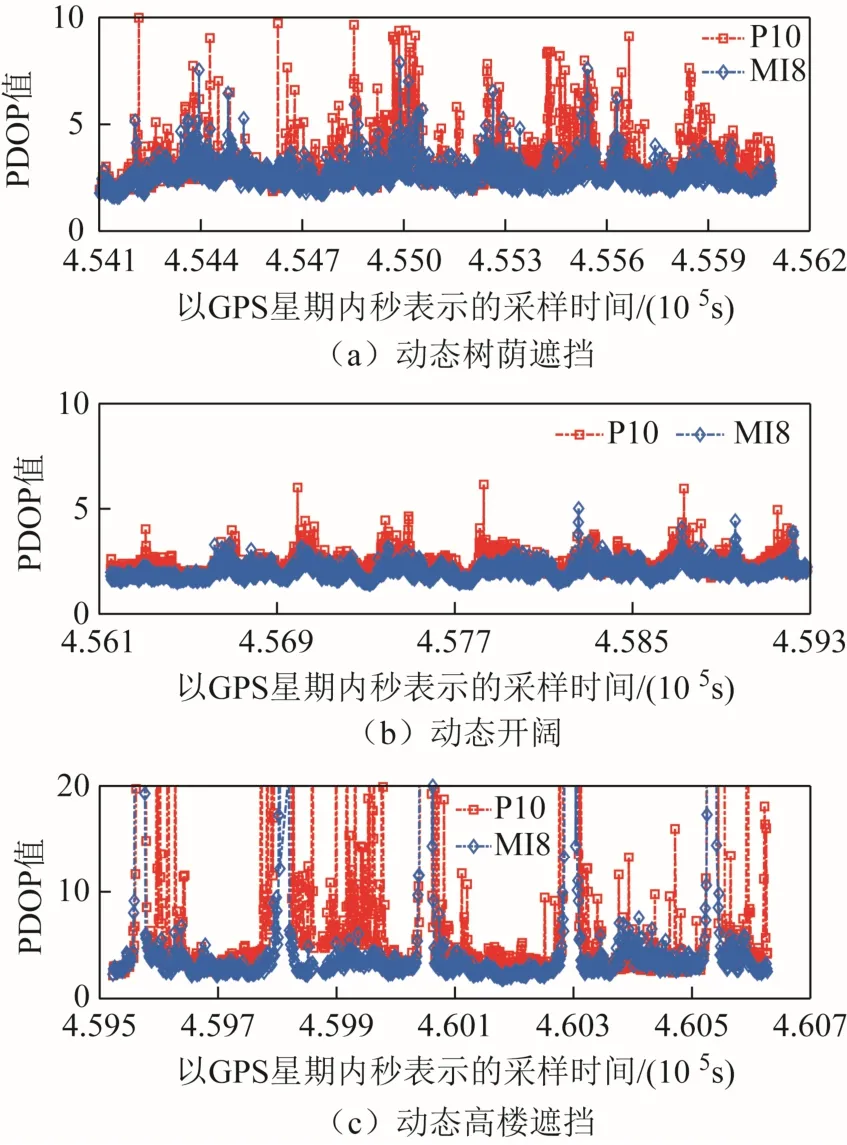
图6 动态场景的PDOP值
从图6可以看出,两部手机在动态开阔场景中的 PDOP值最优,其次是动态树荫遮挡场景中的PDOP值。在动态树荫遮挡和高楼遮挡场景中,两种手机的 PDOP值时间序列,均出现了明显的起伏波动,直观地反映出不同观测环境对手机测速精度的影响。特别是在动态高楼遮挡场景中,两部手机的PDOP值时间序列,均出现了几处大波动。这是由于穿过高楼时卫星信号出现失锁,无法有效定位和测速。
图7给出了MI8手机G24、J02、C19卫星在三种动态场景中(由上向下分别是树荫遮挡、开阔和高楼遮挡场景)载波相位历元间三次差时间序列,其中G24、J02为双频L1/L5信号卫星。
从图7相位历元间三次差时间序列可以看出,受环境遮挡的影响,MI8手机载波相位频繁发生周跳。即使在动态开阔场景中,MI8手机相位发生周跳的次数也较多。这从侧面说明了相位周跳探测和抗差估计的重要性。相位历元间三次差时间序列中的大粗差呈现出周期性趋势,特别是在开阔场景中,周期性趋势更加明显。这是由于在小推车动态采集数据实验中,多次重复经过不同场景的既定路线。在高楼遮挡场景中,相位历元间三次差时间序列中出现了几处中断,这是由于穿过高楼时卫星信号受到严重遮挡而引起载波相位短暂失锁。同一动态场景中,MI8手机相同卫星在不同频段的载波相位历元间的三次差时间序列呈现出差异性。文献[15]详细分析了 MI8手机的双频卫星观测数据特性,评估了在城市环境下基于多模双频卫星信号的定位性能。

图7 动态场景MI8手机载波相位历元间三次差
基于动态观测数据,图8给出了开阔场景中,P10、MI8手机三种测速方法测速误差时间序列。表2给出了P10、MI8手机在三种动态场景中测速误差的RMS统计值。
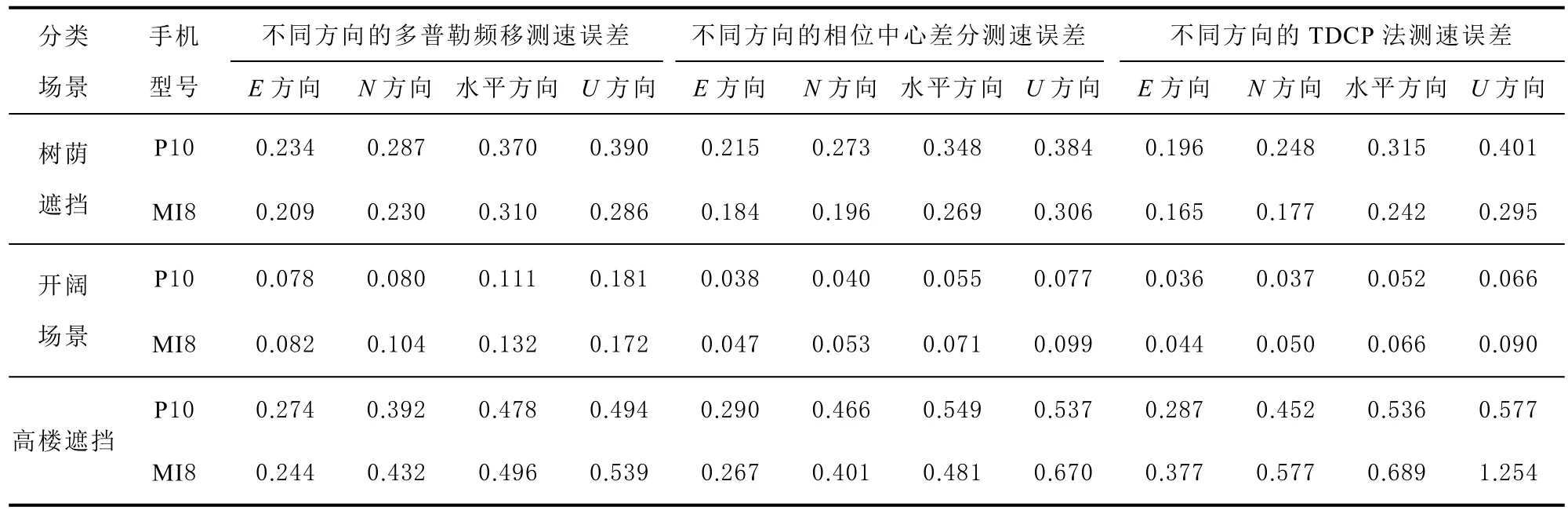
表2 动态场景下P10、MI8测速误差RMS统计值 单位:m/s
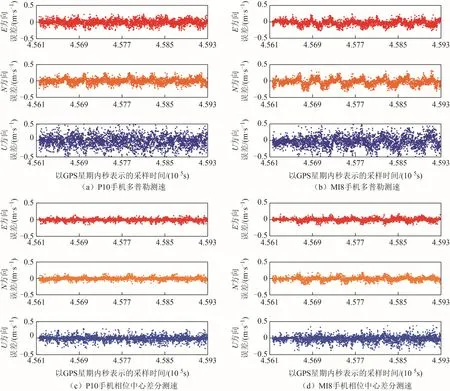
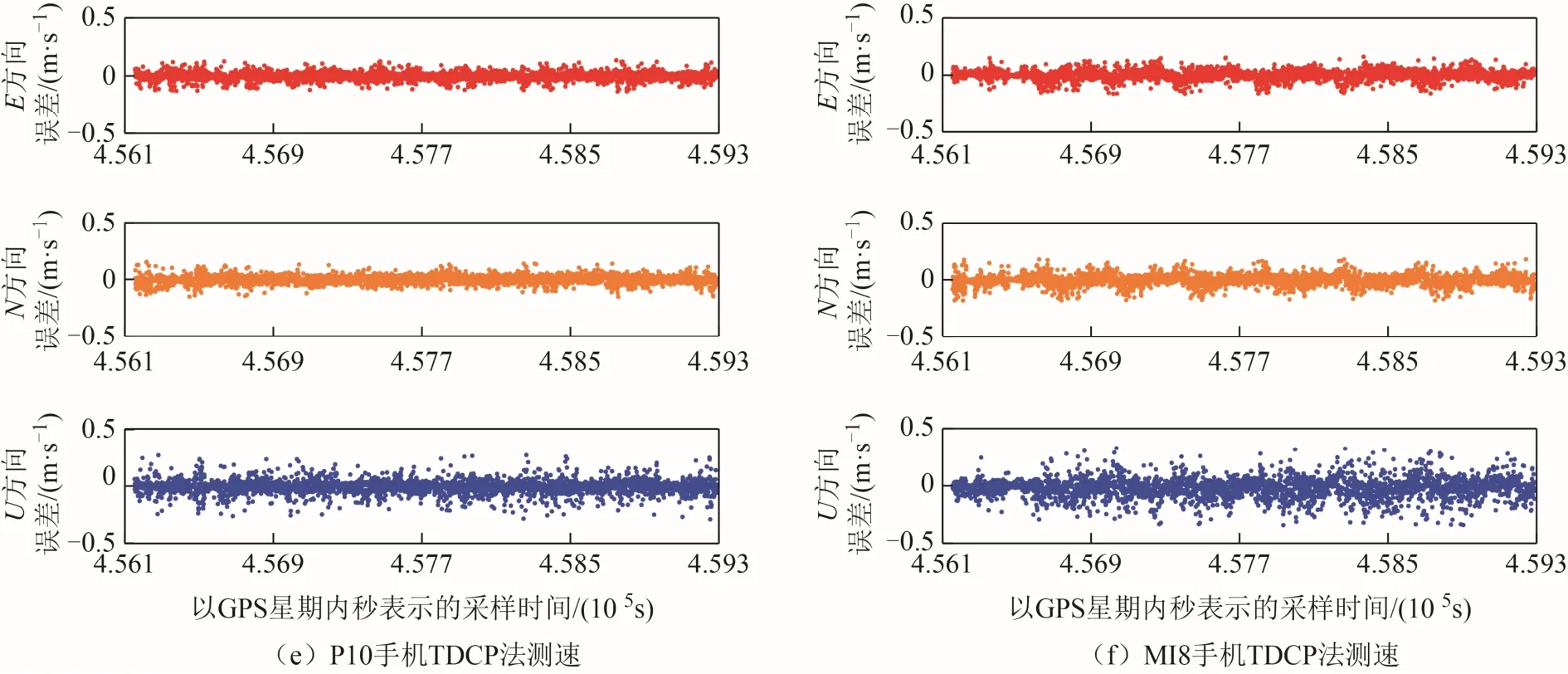
图8 开阔场景中P10和MI8手机测速误差时间序列
在树荫遮挡场景中,受观测数据质量的影响,两部手机测速精度偏低。在同一观测时段内,双频MI8手机的卫星观测数据更多,其测速精优于P10手机。在水平方向上,比较三种测速法测速精度,两部手机均表现出 TDCP法测速精度最高,载波相位中心差分法次之。P10手机的多普勒频移测速和载波相位中心差分法,在水平方向上的测速精度分别为3.70、3.4 8 dm/s,P10手机的TDCP法,在水平方向上测速精度为3.15 dm/s。MI8手机的多普勒频移测速和载波相位中心差分法,在水平方向上的测速精度分别为 3.10、2.69 dm/s,MI8手机的TDCP法,在水平方向上的测速精度为 2.42 dm/s。在观测时段内,由于存在连续的树荫遮挡,剔除了一些含有粗差的卫星观测数据,这也在一定程度上破坏了卫星的空间几何分布构型。两部手机在垂直方向上的载波相位测速精度,均不及多普勒频移的测速精度。P10和MI8手机的三种测速法,在垂直方向上的测速精度分别约为4、3 dm/s。
在动态开阔场景中,两部手机均得到了较好的测速结果。在相同观测时段内,P10手机的可见卫星数维持在20 颗及以上,MI8手机的可见卫星数维持在 35 颗及以上。参考图6 动态开阔场景中,两手机TDCP测速法的PDOP值的时间序列,TDCP法的 PDOP值的时间序列除出现几处明显波动之外,与MI8手机的PDOP值的时间序列相接近。MI8手机在可见卫星数方面,比P10手机具有优势,但二者在动态开阔场景中,可见卫星数均较为充足,PODP值也较为接近,考虑是MI8手机部分卫星观测数据质量不及P10手机的因素,MI8手机并没有显示出双频手机的优势,测速精度略低于 P10手机。比较三种测速法在水平方向和垂直方向上的测速精度,两部手机均表现出 TDCP法测速精度最高,载波相位中心差分法次之。P10手机的多普勒频移在水平方向上的测速精度约为 1 dm/s,在垂直方向上测速精度约为 1.81 dm/s。两种载波相位法在水平方向上的测速精度约为5~6 cm/s,在垂直方向上的测速精度为6~8 cm/s。MI8手机的多普勒频移在水平方向上的测速精度为 1.32 dm/s,在垂直方向上的测速精度为 1.72 dm/s。两种载波相位法在水平方向上的测速精度约为7 cm/s,在垂直方向上的测速精度约为10 cm/s。
在高楼遮挡场景中,卫星信号受遮挡严重,载波相位频繁发生失锁且多路径和纯反射非视距(none line of sight, NLOS)信号引起的非视距误差较大,使得多普勒频移和载波相位观测噪声较大。两部手机多普勒频移测速和载波相位测速精度均较差。在这一场景中,两部手机均表现出TDCP法的测速精度最差,多普勒频移的测速精度最高。两部手机的多普勒频移在水平和在垂直方向上的测速精度约为5 dm/s。P10手机的两种载波相位测速法,在水平方向上的测速精度约为5.5 dm/s,在垂直方向上的测速精度为5~6 dm/s。MI8手机的载波相位中心差分法和 TDCP法,在水平方向上测速精度分别约为5、7 dm/s,TDCP法在垂直方向上的测速误差达到1.25 m/s。
在静态场景、动态树荫遮挡和开阔场景中,相比多普勒频移测速和相位中心差分测速,MI8和P10手机的TDCP测速法,显示出了明显的精度优势。图9 给出了MI8手机TDCP法在静态和动态测试场景中的测速误差累积分布图。
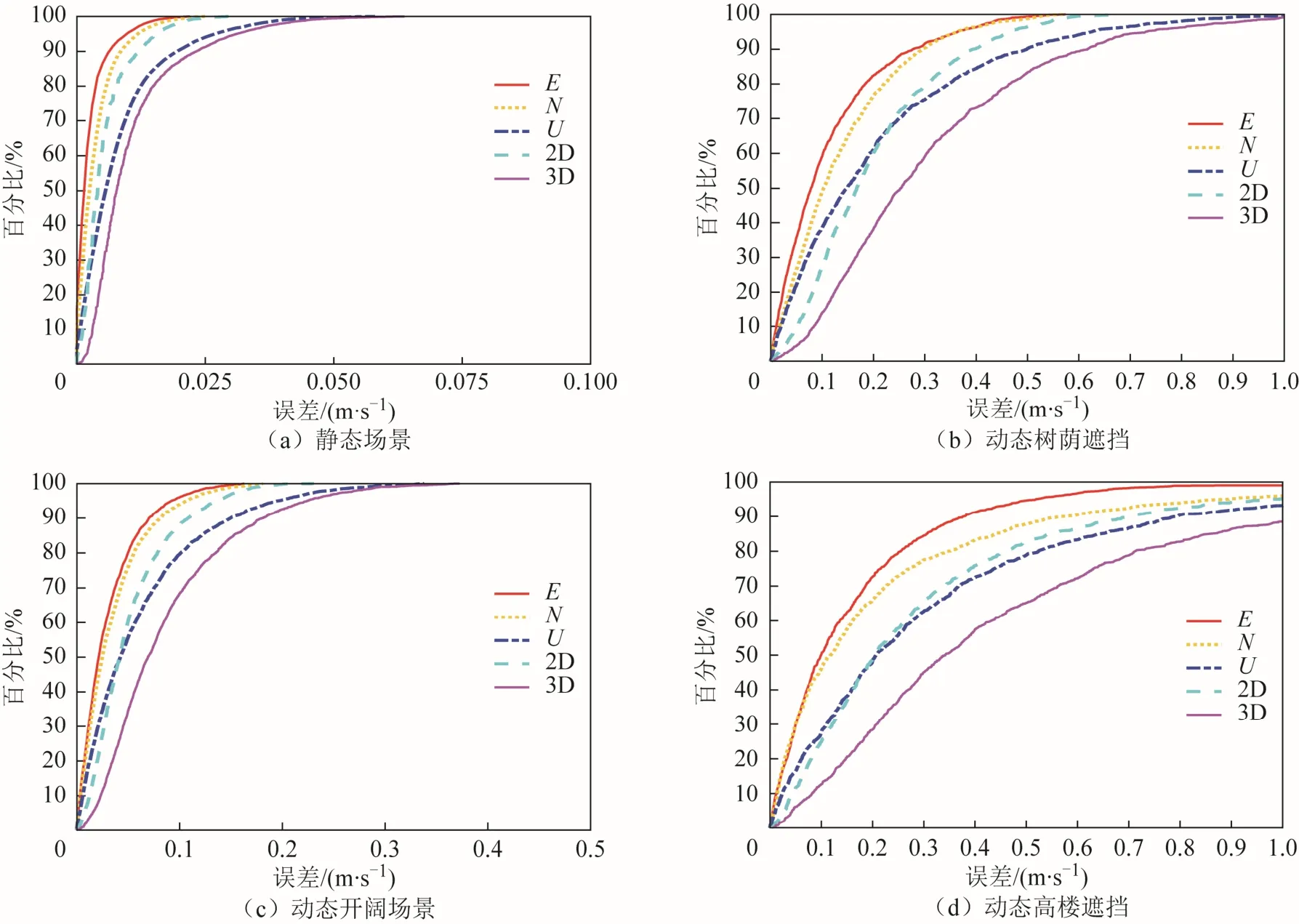
图9 MI8手机TDCP法在不同场景中的测速误差累积分布
从图9可以看出,在静态场景中,MI8手机的TDCP法,单方向速度分量的测速精度可达毫米每秒级,水平和垂直方向上的测速精度优于5 cm/s。在动态开阔场景中,MI8手机的 TDCP法,单方向的测速精度可达厘米每秒级,水平和垂直方向上的测速精度优于 10 cm/s的观测历元,占比分别约为88%和80%。在动态树荫遮挡场景中,受观测环境的影响,导致 MI8手机的TDCP法的测速精度下降。水平和垂直方向上的测速精度优于 10 cm/s 的观测历元占比分别约为28%和40%。在动态高楼遮挡场景中,MI8手机的TDCP法的测速精度较差,水平和垂直方向上的测速误差大于1m/s 的观测历元占比分别约为5%和7%。
3 结束语
本文采用多普勒频移、载波相位中心差分和载波相位历元间差分三种 GNSS单点测速方法,评估了小米 8和华为 P10安卓智能手机在静态、动态场景中的测速精度。安卓智能手机搭载低成本GNSS定位芯片和线性极化天线,载波相位易受观测环境影响而频繁发生周跳,安卓智能设备在严重遮挡场景中(比如高楼连续遮挡场景),如何获取高精度的定位测速结果,仍是亟待解决的问题。上述静态和动态实验场景均为安卓手机在城市使用的典型的场景,本文通过实验,为安卓设备测速研究提供了一定的数据参考。
猜你喜欢
云南画报(2021年8期)2021-11-13
北京航空航天大学学报(2021年9期)2021-11-02
北京航空航天大学学报(2021年6期)2021-07-20
成都体育学院学报(2021年1期)2021-07-16
中国空间科学技术(2021年1期)2021-03-16
阅读(低年级)(2019年4期)2019-05-20
电机与控制学报(2018年9期)2018-05-14
移动通信(2017年11期)2017-06-20
物理教学探讨(2014年5期)2014-09-18