
高速动车组制动控制技术研究
2021-06-22 08:28罗飞平孙环阳张磊舒浩然
机电产品开发与创新 2021年3期
罗飞平, 孙环阳, 王 群, 张磊, 舒浩然
(南京中车浦镇海泰制动设备有限公司, 江苏 南京 211800)
0 引言
制动控制作为高速动车组制动系统的核心技术,合理的进行制动力控制和制动力管理是保证动车组制动作用的关键。动车组制动力控制通常分为均衡制动控制模式和电制动优先控制模式, 制动力管理通常分为列车制动管理、编组管理和自律管理。 本文对制动控制模式和制动管理方式进行了详细分析,并从减少滑行、减少闸片磨耗、闸片磨耗均衡性、实际减速度准确控制、多级或无级紧急制动控制等角度提出了动车组制动控制的研究方向。
1 制动控制模式
1.1 常用制动控制模式
动车组常用制动控制模式通常分为均衡制动控制和电制动优先控制[1]。
1.1.1 均衡制动控制模式
均衡制动控制实施方法是, 各车辆承担自身的所需制动力,动车优先使用电制动力,不足的部分采用空气制动力,拖车采用空气制动力。 当动车电制动故障时,采用空气制动承担,见图1。
均衡制动控制有手动触发和自动触发两种方式。 手动触发: 当列车在雨雪等轮轨黏着条件不良的情况下运行时, 可通过司机室按钮将常用制动转换为均衡控制方式。 自动触发:当常用制动且速度低于一定速度时,自动进入均衡控制方式。
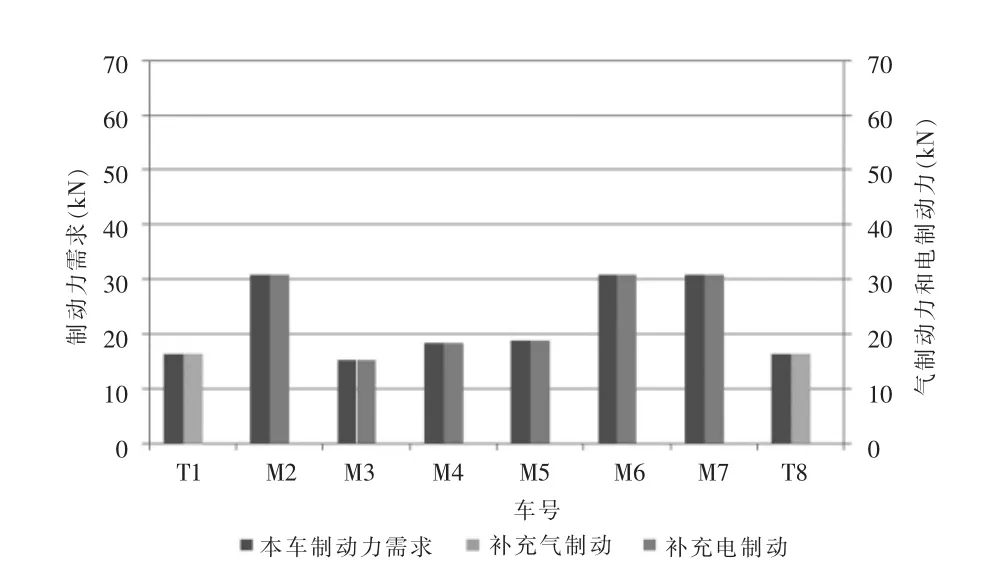
图1 均衡制动控制模式
均衡制动控制模式的优点是可保证各车减速度一致,从而有效地降低滑行;其缺点是,动车的电制动不能最大程度的有效利用(电制动能力通常能承担本动车制动力需求还有富余)。
1.1.2 电制动优先控制模式
电制优先控制实施方法是, 动车的电制动力达到最大值之前,优先使用各动车的电制动,电制动不足部分由拖车和动车的空气制动承担。 当动车电制动故障或不足时,动车角色转为拖车。
其优点是可最大程度的利用电制动, 从而减少闸片磨耗。 其缺点是,动车承担的制动力较多,可能会导致动车容易滑行。
电制动不足情况下的空气制动补充, 具体可分为以下几种分配方法。
第一种: 拖车先补充空气制动力至本拖车制动力需求, 不足部分由动车补充空气制动力至本动车制动力需求,见图2。
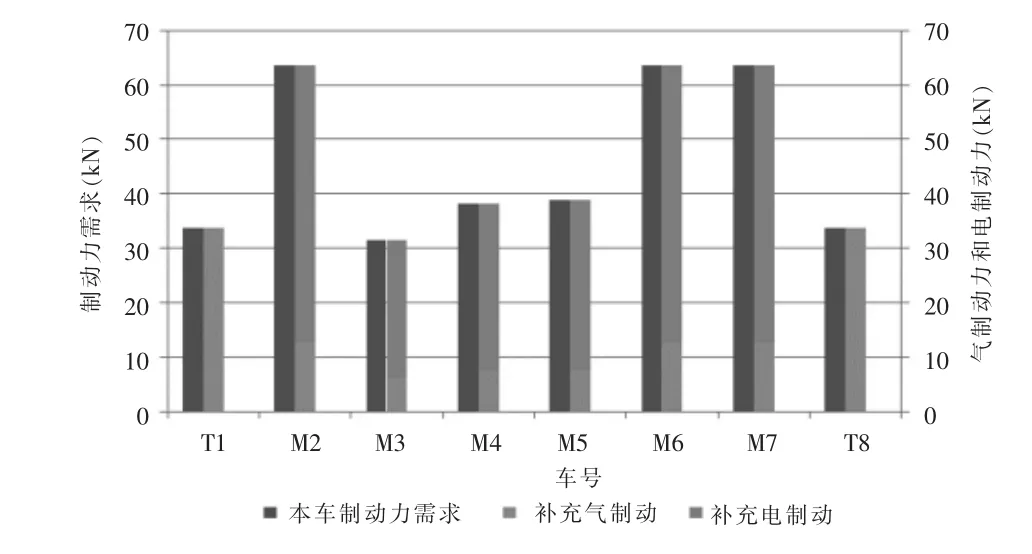
图2 电制动优先控制模式方法1
第二种: 拖车先补充至空气制动能力的一定百分比(该百分比可根据具体情况调节),不足部分按照拖车、动车剩余空气制动能力的比例进行补偿 (该空气制动能力综合考虑车重比和基础制动功率比),见图3。

图3 电制动优先控制模式方法2
第三种:在不超过黏着极限的情况下,动车和拖车按空气制动能力的比例进行补偿(该空气制动能力综合考虑车重比和制动盘比)或平均补偿;动车达到黏着极限后制动力不再增加,不足部分由拖车空气制动补偿,见图4。

图4 电制动优先控制模式方法3
可以看出, 第一种方法能一定程度减少大制动级别下动车滑行,但该方法下拖车的闸片磨耗将比动车大;第三种方法能使拖车与动车闸片磨耗尽可能相同, 但该方法下动车更容易滑行; 第二种方法可以通过调节拖车先补充至空气制动能力的百分比数值, 实现不同空气制动力分配效果, 在百分比为一定值的情况下分配效果基本上和第一种方法相同,在百分比为0%情况下分配效果基本上和第三种方法相同。
1.2 紧急制动控制模式
紧急制动通常分为紧急制动EB(含电制动)和紧急制动UB(纯空气制动)。
紧急制动EB 采用均衡控制方式。 主要原因为电制动无较多的富余,同时可保证各车减速度一致,从而有效地降低滑行。
紧急制动UB 通过紧急电磁阀直接控制, 与微机控制中的速度-黏着控制不同,通过调压阀或空重车阀输出紧急制动UB 预控压力,为防止黏着限制,动车与拖车在不同速度点将制动缸输出压力调节为低压力,见图5。
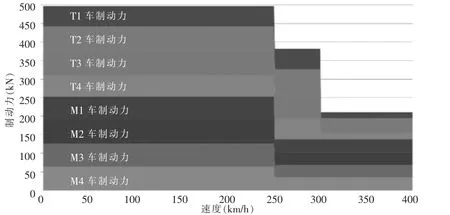
图5 紧急制动UB 空气施加
2 制动管理方式
列车制动力管理方式通常分为整车管理、编组管理、自律管理。
2.1 整车管理
一般将司机室激活的车辆作为列车级管理单元,以头尾车作为单元级管理单元。 列车级管理单元通过单元级管理单元收集全列车可用电制动和可用气制动信息,按照上述制动控制模式分配整车电制动和气制动的制动命令。 各车制动控制系统通过单元级管理单元接收到制动命令后按照述制动控制模式计算本车需施加的电制动和气制动力值。
整车管理的优点主要有, 整车电制动可以在全列车范围最大程度利用; 一个车电制动故障时可以由其它车电制动来优先补充;一个车空气制动故障时,在不超过黏着限制条件下,可以由其它车空气制动来补充。
2.2 编组管理
动车组通常以1 动1 拖或2 动1 拖为1 个制动控制单元。单元内动车计算编组内所需制动力,当电制动足够时,向拖车发送减算指令表示电制动富余值,拖车计算本车制动力需求减去该富余值得到本车空气制动力需求。
编组管理的优点是制动接口简单可靠;对网络依赖性低。
2.3 自律管理
在网络掉线或紧急牵引模式时,通常采用自律管理。自律管理的前提条件是各车均能获取制动指令, 网络掉线车辆根据制动指令控制本车制动施加。
自律管理的优点主要是保证单车网络掉线时仍能进行制动控制。
3 制动控制研究方向探讨
3.1 减少滑行
在制动力大于黏着力时,车轮就可能出现滑行。通常控制滑行的现有措施主要有两种,一种是降低制动力,一种是增加黏着。下面从制动控制优化的角度考虑,进一步分析减少发生滑行概率的方法。
由1.1.2 节可知, 对于采用电制动优先控制模式,常用制动时,动车的制动力经常比拖车的制动力大,经常造成动车更容易滑行。
常用制动时,从制动控制角度出发,可以考虑动车一定程度滑行时(如1 个以上动车滑行且无拖车滑行),本次制动过程中, 将由动车优先承担制动力转换为各车均承担制动力,即由电制动优先控制模式自动转换为均衡控制模式。
对于动车优先滑行的情况, 由于将动车的制动力调整一部分到拖车承担,不同于防滑控制直接减少制动力,因此采用该制动力控制方式相对防滑控制可以最大程度的减少制动力的降低。
3.2 减少闸片磨耗
通常设计上减少闸片磨耗的手段主要为提高电制动覆盖级位(与制动系统相关)、降低电制动退出点(与制动系统相关)、避免单车施加制动(与制动系统相关)、降低轴重、 恒速控车仅采用电制动、ATO 控车/手动控车尽量采用低级位调速或停车等措施。
下面从提高电制动覆盖级位、降低电制动退出点、避免单车施加制动的角度考虑,进一步分析减少闸片磨耗的方法。
3.2.1 电制动覆盖级位
假设车辆编组采用4 动4 拖方式, 电制动能覆盖整车常用制动4 级减速度曲线,当制动级位高于4 级时,才需要补充空气制动力。
通常动车组采用4 级及以下级位停车, 可以最大程度的减少闸片磨耗,见图6。

图6 电制动覆盖曲线
3.2.2 降低电制动退出点
可以考虑降低电制动退出点,电制动退出的越晚,闸片磨耗更低,但对制动控制的要求越高,即保证动力制动和空气制动的平稳转化,防止列车冲击。
动力制动和空气制动能否实现平稳转化, 主要取决于2 种制动力变化的同步性、同速率,以及转换过程中总制动力与制动需求是否相吻合[2]。
具体实施方法为,牵引系统TCU 提前提供电制动力消退命令,TCU 在发出该命令延时一定时间后将电制动力按固定斜率曲线下降,制动系统BCU 接收到电制动消退命令后, 按固定斜率曲线上升来实现电空混合的平顺配合转换。 对于由BCU 控制的电制动退出,电制动消退点、电制动退出斜率、空气制动上升斜率可由BCU 统一控制。但是,如果实际电制动退出斜率和空气制动上升斜率与固定斜率不一致时,将对停车冲击和精度产生影响,BCU 可以考虑采用实际电制动信号并结合空气制动上升延时性对空气制动控制进行修正,见图7。

图7 电制动退出过程
3.2.3 避免单车施加制动
当单车施加制动,其它车未施加制动时,全列车的能量将都由该车的基础制动消耗, 将可能造成该车制动盘和闸片损坏。因此,需考虑单车施加制动触发全列制动施加的方式。 如单车意外施加紧急制动UB 时可自动触发全列紧急制动EB,列车控制系统检测到单车制动施加时触发全列最大常用制动施加。
3.3 闸片磨耗均衡性
闸片磨耗均衡性受到的影响太多,司机操作习惯、线路情况、闸片特性等,需要长期运营数据积累。 部分动车组中拖车闸片磨耗量大于动车[3],部分动车组动车闸片磨耗量大于拖车。
造成上述情况的原因为: 拖车闸片磨耗量大于动车动车组电制动覆盖制动等级相对较低, 正常停车时高速时可能需要在拖车补充空气制动力, 因此拖车承担的闸片磨耗要大于动车。 动车闸片磨耗量大于拖车动车组电制动覆盖制动等级相对较高, 正常停车高速时往往不需要补充空气制动, 仅在低速时采用均衡模式补充空气制动力,由于动车制动缸配置相对拖车配置较少,因此拖车承担的闸片磨耗要小于动车。
为了使各车闸片磨耗均衡,可以参照1.1.2 节中第二种分配方式, 调整拖车补充百分比来调节拖车与动车不同的磨耗量。
3.4 减速度准确控制
在动车组整车控制中, 通常要求实际减速度曲线不低于设计减速度曲线(平直道无滑行),而实际试验时经常发现两条曲线无法准确贴合, 其原因主要为实际闸片摩擦系数与制动控制用摩擦系数存在较大偏差[4]。
由于实际摩擦系数受影响的因素较多及实际中的控制难度问题,实际摩擦系数通常是一个变化值,即使通过台架试验得到的摩擦系数也可能与现车运用情况不同,可从下面两个角度进行研究,实现实际减速度精确控制,大大提高制动距离的精度和可靠性,保证不同载荷、不同摩擦材料下保持稳定的制动距离。
(1)通过整车试验获得到的实际减速度,对制动控制用摩擦系数进行修正,使实际减速度尽量贴合设计减速度。
(2)采用减速度闭环控制技术,在不加装加减速度传感器的前提条件下, 基于在线参数估计的自适应控制方法,通过对闸片摩擦系数、坡道坡度、载重等扰动进行估计,然后用估计出的参数进行制动力的计算,可以显著减小实际减速度与目标减速度的偏差[5]。在加装加减速度传感器时,通过检测整车实际减速度调节整车制动力需求,减小实际减速度与目标减速度的偏差。
3.5 多级或无级紧急制动控制
高速动车组紧急制动通过设置2 阶段压力调整空重车阀/中继阀实现,单车二段式、整车三段式,其中黏着并未完全充分利用,如果基础制动能力足够时,可通过以下措施实现更高的黏着利用,使动车组停车距离更短,见图8~10。

图8 动车组紧急制动控制

图9 多级紧急制动控制

图10 无级紧急制动控制
(1)通过设置多阶段压力调整空重车阀/中继阀实现,比如,单车三段式、整车五段式,提高轮轨黏着利用率。
(2)通过高安全等级电路控制电子空重车阀实现无级减速度方式,提高轮轨黏着利用率。
4 结论
常用制动控制模式分为均衡制动控制模式和电制动优先控制模式, 电制动优先控制模式通常又分为三种控制方式,可以根据具体情况合理应用。制动管理方式分为整车管理、编组管理、自律管理三种方式,整车管理与自律管理结合是制动管理应用的趋势。
由电制动优先控制模式自动转换为均衡控制模式是减少滑行的研究方向。
提高电制动覆盖级位、降低电制动退出点、避免单车施加制动是减少闸片磨耗的研究方向。 根据制动减速度特性和电制动能力进行制动力的合理化分配, 是使闸片磨耗均衡的研究方向。
对摩擦系数进行修正以及减速度闭环控制是实现实际减速度准确控制的研究方向。
多级或无级紧急制动控制是基础制动能力足够时使动车组停车距离更短的研究方向。
猜你喜欢
铁道机车车辆(2022年1期)2022-03-24
军事文摘(2021年18期)2021-11-25
机电信息(2021年25期)2021-10-15
小哥白尼(趣味科学)(2019年10期)2020-01-18
现代临床护理(2018年5期)2018-03-07
学苑创造·A版(2018年12期)2018-03-04
科技与创新(2017年13期)2017-07-19
阅读(中年级)(2016年8期)2016-05-14
读写算(中)(2015年25期)2015-11-07
铁道机车车辆(2014年1期)2014-04-05
