
基于RBF系统辨识与PID控制的收卷机张力控制系统研究
2021-06-23 10:10刘冠华韩林洁
制造业自动化 2021年6期
刘冠华,肖 威,韩林洁
(1.北京机械工业自动化研究所,北京 100120;2.北京机械工业自动化研究所有限公司,北京 100120)
0 引言
就收卷机张力控制系统而言,其模型的多耦合和不确定性与现场工作环境的扰动都降低了收卷机的张力控制精度。基于此,本文提出了一种使用基于径向基函数(RBF)系统辨识与PID控制算法相结合的智能控制器,即利用神经网络对任意非线性模型的逼近能力,将其辨识模型用于PID参数的整定,以此来提升其常规张力控制系统的自适应性,并在一定范围内使其具有自学习能力,而后通过实验来验证该控制策略的鲁棒性和优越性。
1 增量式PID控制策略
传统PID控制系统结构如图1所示。其中r(t)为系统期望输出值,y(t)为系统实际输出值,e(t)为偏差值作为PID控制系统的输入量即e(t)=r(t)-y(t)。u(t)是PID控制系统的输出量。
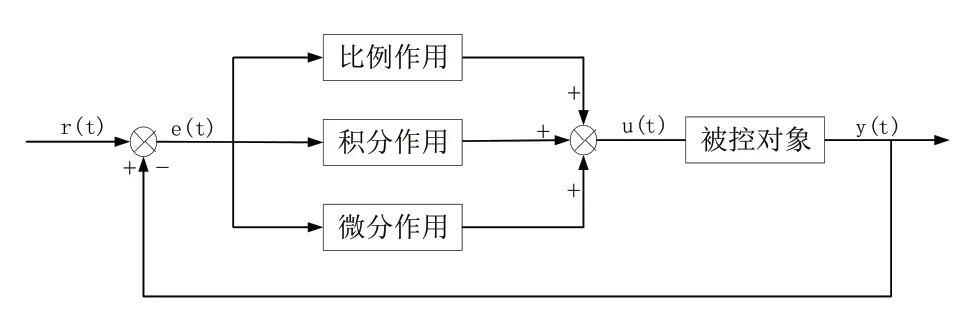
图1 传统PID控制系统结构图
常规PID控制系统实质是将输入量分别进行比例(P)、积分(I)、微分(D)运算并将运算结果进行线性组合求得出输出量u(t)。u(t)的表达式如式(1)所示。

式中控制系统的输入为e(t),控制系统的比例系数为Kp。控制系统的积分时间常数为Ti,控制系统的微分时间常数为Td。
设系统采样周期为T,用k个采样时刻点的总时间kT代表连续时间,将积分以累加形式表示,微分以增量形式代替,对式(1)进行离散化即:

根据式(2)计算u(k-1),并令Δu(K)=u(k)-u(k-1)可得:
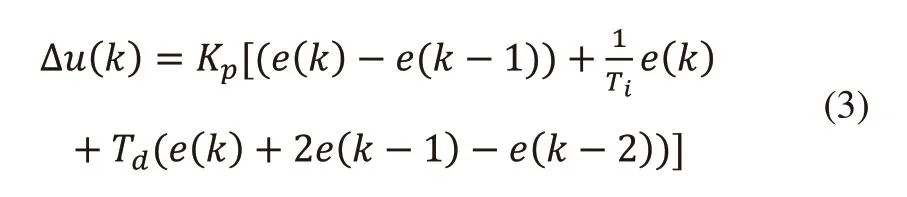
式(3)即为增量式PID算法表达式,适用于自身带有积分记忆元件的被控对象,该控制算法的第k次输出值Δu(k)只与于控制系统第k、k-1、k-2次的输入信号有关,并对其分别进行了加权,这有利于降低处理器计算负担且不易出现积分饱和现象,只在需要时进行输出限幅[1]。
2 RBF神经网络介绍
径向基函数(RBF-Radial Basis Function)神经网络是J.Moody在80年代末提出的一种神经网络[2],是以函数逼近理论为依据的一种全连接单隐层的三层前向神经网络(FFNN)[3],它包括一个输入层,一个隐含层和一个输出层。目前认为其可以逼近任意连续函数[2]。
RBF神经网络的激活函数为高斯(Gaussian)核函数,高斯核函数在局部范围内为非零值,因此RBF神经网络为局部逼近的神经网络[4]。RBF神经网络的学习速度相对较高,可以满足实时控制。且其对于训练样本的依赖性和要求不高,现代工业控制通常采用RBF网络与其他常规控制算法相结合,此类控制系统通常具有相当的精度、自适应性和鲁棒性[5]。
3 基于RBF辨识网络的自适应PID控制
3.1 RBF辨识网络
当前许多领域都是以数学模型为依据来确定最终的控制决策,这可以有效保证控制决策的科学可靠[6]。但收卷机张力控制系统统较为复杂,难以经过理论分析获得数学模型,因此采用RBF神经网络辨识系统利用现场实验来获取数学模型以及估计参数,为相关实验提供理论支撑[7]。
RBF辨识网络在运算时是按照前向或反向传播过程组织的,下面将对这两种过程进行叙述。
1)前向传播过程。
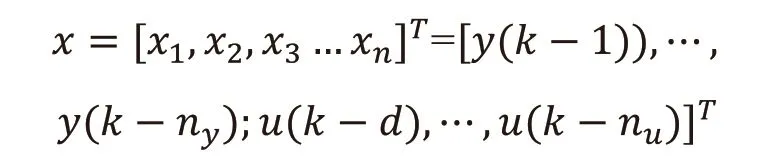
设RBF神经网络的系统辨识结构设计n-m-1网络结构,激活函数选择高斯函数,设输入层有n个节点,即其中输入为:
hj为隐含层m个节点中第j个神经元的输出,表达式为:

cj=cj1,cj2,cj3,…,cjn,cj为第j个节点的中心向量。
b=[b1,b2,b3,…,bm]T,bj为第j个节点的基宽参数且为大于0的数值。
w=[w1,w2,w3,…,wm]T,w为网络的权值。
RBF神经网络前向传播的输出为:ym(k)=w1h1+,w2h2+…+wmhm。
2)反向传播过程
梯度下降法具有形式简单、初始效率较高[8]、局部寻优效果良好等优点[9],因此采用梯度下降法作为训练算法。
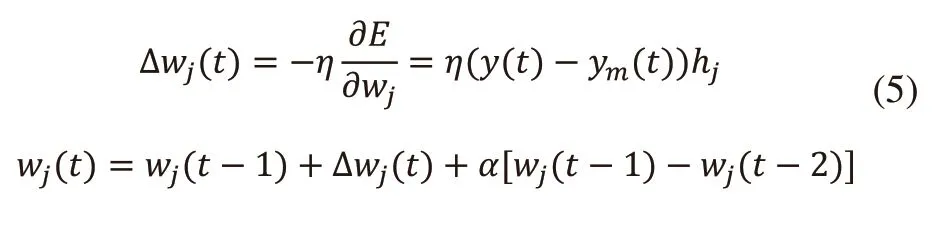
设RBF神经网络辨识系统的输出误差为e(t),表达式为e(t)=y(t)-ym(t)。其中y(t)为系统实际输出,ym(t)则为辨识模型实际输出。同时取辨识误差指标为E(t),表达式为式(4)。

1)权值大小按照式(5)进行调节:
2)隐藏层节点基宽参数按照式(6)进行调节:

3)隐藏层中心向量按照式(7)进行调节:
Jacobian信息是反映了RBF网络辨识所得对象的输出对输入的敏感度,其辨识算法如式(8)所示。
3.2 基于RBF系统辨识的自适应PID控制器原理及其步骤
基于RBF系统辨识的自适应PID控制器的原理是使用基于RBF神经网络的辨识系统对收卷机张力控制系统进行在线辨识,然后根据得到的辨识系统对增量式PID参数进行在线整定。
本文中辨识系统的输入量为系统偏差、张力控制系统输入量以及张力控制系统输出量。在运行过程中辨识系统对张力控制系统进行学习和逼近,使用辨识系统的Jacobian信息来实现对PID参数的整定。RBF神经网络自适应PID控制的结构如图2所示。

图2 基于RBF系统辨识的自适应PID控制结构图
图2中增量式PID算法中增量表达式为式(9),控制率为式(10)。
其中Kp、Ki、Kd为PID可调参数,且:
性能指标函数为式(11)所示。

使用梯度下降法对PID参数进行调整,下述三式即为其参数变化量的计算方法。其中ηc为学习率。

PID参数的更新算法为:

由于辨识模型的未知性,因此需做近似处理[10],取RBF网络的第一个输出x1为uk即x1=uk则:

假设欲辨识的非线性系统结构参数已知,则基于RBF神经网络的自适应PID控制器结构如图4所示,则其运行步骤如下:
1)确认RBF神经网络结构为n-m-1,其中输入参数数量为n,隐含层节点数为m,并确认中心向量、基宽向量、权值向量、学习速率、动量因子初始值。设置PID算法的参数初始值Kp(0)、Ki(0)、Kd(0),以及学习率ηc。
2)接收输入向量,使用式(9)、式(10)计算被控系统输入u(t),计算辨识系统输出ym(t),采样系统实际输出y(t),利用式(4)计算辨识模型取辨识误差指标为E(t)。
3)将得到误差指标E(t)值,联立式(5)、式(6)、式(7)计算网络参数中心向量、基宽向量、权值向量的更新量。
4)使用y(t)、r(t)计算性能参Ec(k),联立式(13)计算Jacobian信息,使用式(12)计算PID参数更新量。
5)使用得到的的更新量更新辨识系统以及增量PID控制系统参数。
6)将ec(t)与设定的偏差值对比,判断结束程序或返回步骤2)继续(t+1)次运行。
4 基于RBF辨识网络的自适应PID控制策略仿真
基于RBF辨识系统的自适应PID控制算法属于智能PID算法,而现阶段张力控制系统常用的张力控制策略依旧是常规PID控制,下面将通过仿真进行两者性能对比。
4.1 响应及调整性能对比
结合收卷机张力控制系统的常用模型对传递函数为式(14)的被控系统进行控制。其中两者初始参数由实验得到,而智能PID控制器的辨识系统使用3-6-1结构,辨识系统学习率为0.5,PID参数学习率ηc使用动态学习率,以此避免后期系统震荡,且初始值设为0.1,动量因子为0.01。

对智能PID控制器与常规PID控制器分别输入一个阶跃信号,并在50秒时再对两者分别给与一个干扰信号,使用MATLAB进行仿真,结果对比如图3所示。
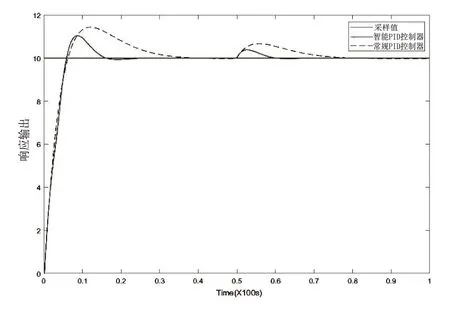
图3 智能PID控制器与常规PID控制器仿真曲线
根据仿真结果可知,智能PID控制器响应曲线的超调量较小,回稳较快,较常规PID控制器有着更强的适应性和鲁棒性。在稳定状态受到干扰时,智能PID控制器的波动幅度较小,调整较快,即智能PID控制器在性能上优于常规PID控制器。
4.2 跟踪性能对比
继续使用上文的非线性被控系统,并使用智能PID控制系统和常规PID控制器分别进行控制。被跟踪信号表达式如式(15)所示。RBF神经网络选取3-8-1结构。跟踪结果如图4所示。
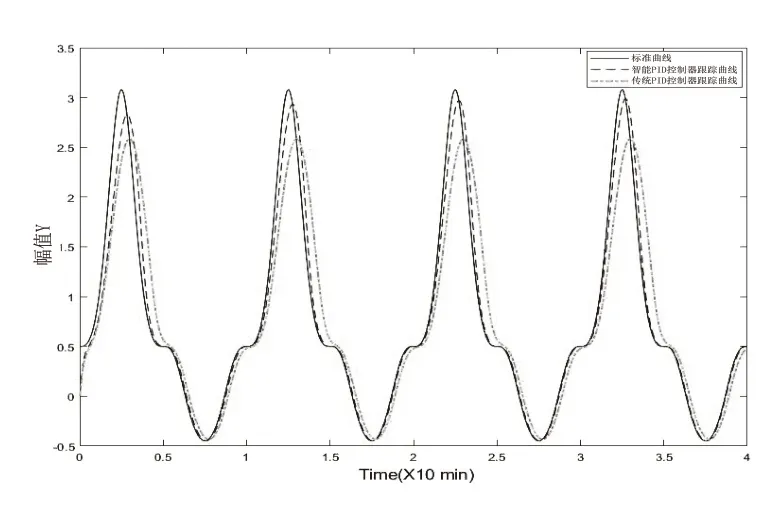
图4 智能PID控制器与常规PID控制器仿真曲线(2)

由图4可知,智能PID控制器的跟踪能力不管在调整速度还是跟踪精度方面均优于常规PID控制器。在调整过程中几乎无超调,具有良好的控制精度和效率,而且随着仿真的持续进行其正在不断接近被跟踪系统。而图5则更明显的反映了智能PID控制器的自学习和自调整能力,随着仿真时间的增加被控系统的输出正在明显逼近被跟踪信号,两者之间的误差越来越小,甚至几乎重合。

图5 智能PID控制器的自学习曲线
根据仿真结果,可以明显看出智能PID控制器在响应、调整性能和跟踪性能两方面均优于常规PID控制器,且具有一定的自学习能力。
5 现场测试
现场测试在本单位已经进场施工的某市6.6mBOPA同步拉伸生产线进行,试验平台采用北自所自研6.6m高速双工位翻转式收卷机,使用常规PID控制与智能PID控制分别对量产合格薄膜进行三次完整收卷,其中收卷机实时张力标准值使用锥度张力函数计算。收卷机张力控制系统工作过程如图6所示,其中收卷电机使用转矩模式。

图6 收卷机张力控制器内部结构图
张力传感器最终测得的张力随卷径变化结果如图7所示,可以看出智能PID控制张力与标准值偏差较小,且随着收卷持续进行,张力偏差不断减小,说明具有相较于常规PID收卷其具有较强自适应性和一定的自学习能力。
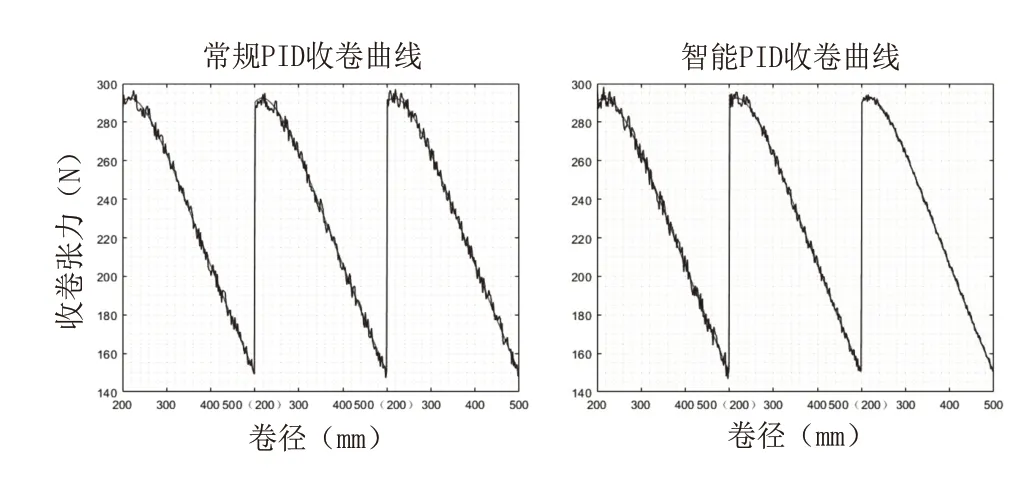
图7 收卷张力曲线对比
6 结语
本文简要介绍了常规PID控制与RBF神经网络,并将基于RBF的辨识系统与PID控制相结合设计了智能PID系统,通过试验和仿真证明了该系统较于传统PID控制在收卷机张力控制方面具有良好的自适应和自学习能力。在一定范围内提高了生产质量。
猜你喜欢
新高考·高一数学(2022年3期)2022-04-28
装备制造技术(2022年11期)2022-02-10
安徽化工(2021年4期)2021-08-23
中学生数理化(高中版.高考数学)(2021年1期)2021-03-19
新世纪智能(高一语文)(2020年9期)2021-01-04
文化产业(2019年6期)2019-09-11
中华诗词(2018年4期)2018-08-17
橡塑技术与装备(2018年10期)2018-05-18
宝藏(2017年6期)2017-07-20
宝藏(2017年6期)2017-07-20
