基于多新息限定记忆的永磁同步电机参数辨识
2021-06-24 02:22张玉峰吴紫辉陈甜甜
科学技术与工程 2021年13期
张玉峰,郭 山,吴紫辉,陈甜甜,刘 娜
(西安科技大学电气与控制工程学院,西安 710054)
永磁同步电机(permanent magnet synchronous motor,PMSM)由于其具有结构简单、成本低、效率高、调速范围宽、动态响应快等优点,被广泛应用于航空、工业控制、新能源电动车等高性能伺服系统。实现高精度位置或转速控制的电机伺服控制技术性能依赖于精确的电机电磁参数[1-3],基于参数辨识的PMSM系统状态监测及故障诊断能提高电机运行的安全可靠性[4-5],因此,参数辨识在电机工程应用中具有重要意义。中外学者对电机参数离线辨识和在线辨识方面进行了大量研究。离线辨识法不能获得电机实时参数,而在线参数辨识方法能够实时跟踪由运行工况及环境的影响的电机参数,从而更新控制器参数实现自适应控制,提高电机控制的动态性能[6-8]。
基于递推最小二乘参数算法的电机参数辨识,无需电机外部激励,简单易实现。文献[9]模拟实际环境改变电机电阻和磁链,辨识误差约为2%,证明递推最小二乘法能够在参数改变的情况下得到准确辨识结果。但因为旧数据一直存在于辨识过程的总体采集数据中,造成新数据价值不高,计算结果实时性不高。文献[10]采用最小二乘法进行参数辨识,其仿真结果在3ms内收敛至1%,由于采样误差等原因,试验研究中电阻参数辨识误差为6%,电感参数辨识误差为10%,限制了算法的应用。
文献[11]提出了结合转速扰动的递推最小二乘法参数辨识,在转子磁链结果收敛后辨识定子电阻,在实验系统中辨识结果仍存在一定的误差。文献[12]在每个脉宽调制周期内测量电流变化率估计电感,跟踪电感变化,具有足够的精度,但其提高了硬件电路成本。文献[13]将最小二乘法辨识得到的电机电阻值代入模型参考自适应法辨识永磁体磁链,降低了算法的收敛速度。文献[14]改进递归最小二次方算法,引入电流变化率改善辨识的动态稳定性,仿真中转矩变化时,最大辨识误差为3.83%,该方法仅辨识了电机电感参数。文献[15]引入带加权因子的折息因子,降低了递推最小二乘法中旧数据对辨识结果的影响,增强了系统参数辨识的实时跟踪性。
现研究永磁同步电机d-q旋转坐标系下的参数辨识模型,采用双闭环矢量控制技术搭建仿真模型,将多新息理论与递推最小二乘法相结合解决抗干扰能力弱等问题,采用限定记忆方法避免辨识计算中的数据饱和问题,在仿真模型中验证所提辨识算法的有效性,并搭建实验平台验证其可行性。
1 同步电机模型
1.1 PMSM数学模型
建立电机模型时,假设电机为理想条件,表贴式PMSM的定子绕组电气对称,忽略电机铁芯饱和情况,则在旋转d-q坐标系下简化的PMSM两相电压方程为
(1)
式(1)中:ud、uq分别为PMSM定子d、q轴电压;Rs为定子电阻;id、iq分别为电机定子d、q轴电流;ω为转子电角速度;ψd、ψq分别为d、q轴磁链;Ld、Lq为d、q轴电感。
PMSM在d-q旋转坐标系下的磁链方程为
(2)
式(2)中:ψf为转子磁链。
由式(1)和式(2)可以得到PMSM在d-q坐标系下的数学模型为
(3)
对于表贴式PMSM,Ld=Lq。
1.2 参数辨识模型
基于PMSM电压方程构造多新息参数辨识模型,对PMSM的数学模型进行离散化处理,采用欧拉近似法对电流导数进行变换为
(4)
式(4)中:Ts为采样时间;i(k)为变量i在k时刻的值。
代入式(3)可得离散化后方程为
(5)
式(5)中:
(6)
最小二乘法的模型为
y(k)=φT(k)θ(k)
(7)
式(7)中:y(k)为系统输出向量;φT(k)为输入向量;θ(k)为辨识估计值。
对比式(5)与式(7),对于PMSM模型的最小二乘系统输出向量y(k)及输入向量φT(k)为
y(k)=iq(k)
(8)
(9)
式(6)中q轴离散方程中含有全部电磁参数φf等,因此仅对q轴方程进行推导即可表示电机电磁参数矩阵为
(10)
电机电磁参数矩阵θ(k)与各辨识参数之间的关系可表示为
(11)
2 基于多新息限定记忆的最小二乘算法
最小二乘法模型中添加误差向量e(k),以考虑实际测试时存在的误差为
y(k)=φT(k)θ(k)+e(k)
(12)
准则函数J(θ)定义为
(13)
通过极小化准则函数可以获得传统最小二乘法参数θ的估计值,这里就需要对k阶矩阵进行求逆运算,增加了计算难度,所以学者们提出了计算量较少的递推最小二乘法,即

(14)
式(14)中:
(15)
且初始状态为
(16)

递推最小二乘法式(14)可以理解为k时刻的估计值为前一时刻θ的估计值加上增益向量K(k)与单新息标量e(k)之积,在新时刻针对单新息进行估计值修正。多新息理论则将修正时使用的单新息标量推广为长度为p的多新息向量,得
(17)
(18)
(19)
输出向量可以表示为
(20)
随着新数据的更新,以往堆积的旧数据会影响算法辨识结果的跟踪性能,出现“数据饱和”,采用限定记忆法限定使用数据的长度为L,减少历史数据,对数据进行更新,可得
(21)
采用多新息后,对辨识参数修正更新的递推算法为
(22)
当数据长度大于L时,增加k+L时刻数据时剔除k时刻的观测数据。协方差矩阵用k~k+L时刻输入观测矩阵Xk表示为
(23)
将式(23)协方差矩阵P(k+1,k+L)展开可得
P(k+1,k+L)=[P(k,k+L)-1-φ(k)φT(k)]-1=
P(k,k+L)+P(k,k+L)φ(k)·
[1-φT(k)P(k,k+L)φ(k)]-1·
φT(k)P(k,k+L)
(24)
将式(24)代入式(14)中,可得在k+1~k+L时刻,所有观测数据对参数估计的结果为
(25)
采用多新息后对旧数据进行消除的递推公式为
(26)
与单新息相比,多新息系统辨识能够提高数据利用率及抗干扰能力。
3 仿真验证
3.1 仿真模型
选用磁场定向控制(field oriented control,FOC)及空间矢量脉宽调制技术(space vector pulse width modulation method,SVPWM),在Simulink环境下建立系统的仿真模型,采用双闭环模型,具体结构如图 1所示。

θe为检测电机转子电角度;ia、ib、ic为检测电机三相绕组电流;为功率管驱动信号;Ts为功率管的开关周期; Udc为逆变器母线电压图 1 PMSM矢量控制仿真模型Fig.1 The vector control simulation model of PMSM
该控制系统转速环、电流环均采用PI控制器,对给定值及检测值的误差进行比例和积分调节,输出交直轴电压控制量。交直轴电压通过坐标变换由两相旋转dq坐标系转换至两相静止αβ坐标系下,采用空间矢量脉宽调制技术生成PWM驱动信号控制逆变器中的功率器件。
参数辨识算法模型如图 2所示,将检测到的电机电压、电流及转速信号通过传输延迟器形成多新息,输入fcn函数模块实现辨识算法后,经滤波器返回Rs、Ld、φf辨识结果进行系统自适应控制。
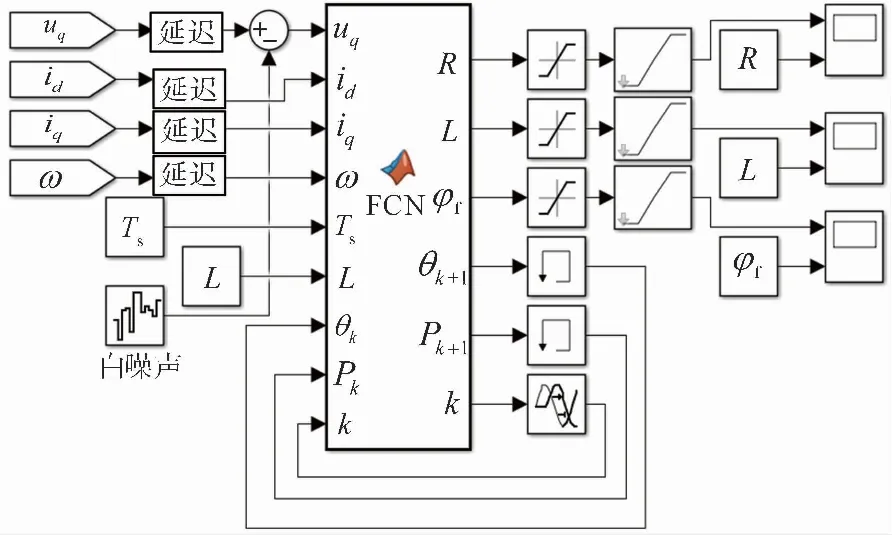
图 2 参数辨识算法模型Fig.2 Parameter identification algorithm model
3.2 模型参数选择
辨识算法的辨识周期设为Ts=100μs,协方差系数α为106,辨识初始值ε为10-4,限定记忆长度L为1000。
多新息参数辨识方法中p的改变对Rs、Ld和φf参数辨识结果同时产生影响,因此定义误差函数δ(i)分析新息长度p对辨识结果整体误差的影响为
(27)

将p设定为1~10,分析新息长度不同对辨识结果的影响,误差对比如表 1所示。

表 1 各新息长度下参数辨识误差Table1 Parameter identification errors under different innovation length
通过观察可以看到随着新息长度增大,稳态误差减小。p=1时,算法即是单新息的限定记忆最小二乘法,多新息方法在稳态误差方面明显优于单新息方法。考虑辨识算法计算量及收敛速度,选新息长度p为5。
3.3 辨识算法性能分析
设定电机模型的电磁参数为恒值,电机定子电阻Rs为0.958Ω,表贴式电机交直轴电感Ld为5.25mH,电机转子磁链φf为0.1827Wb。
根据模型中电机负载转矩突变情况下的辨识结果,分析算法的抗干扰性能。给定转速为750r/min,设置0.1s时负载转矩由0N·m跳变至3N·m,传统递推最小二乘法辨识结果如图 3所示,改进后多新息限定记忆最小二乘法辨识结果如图 4所示。
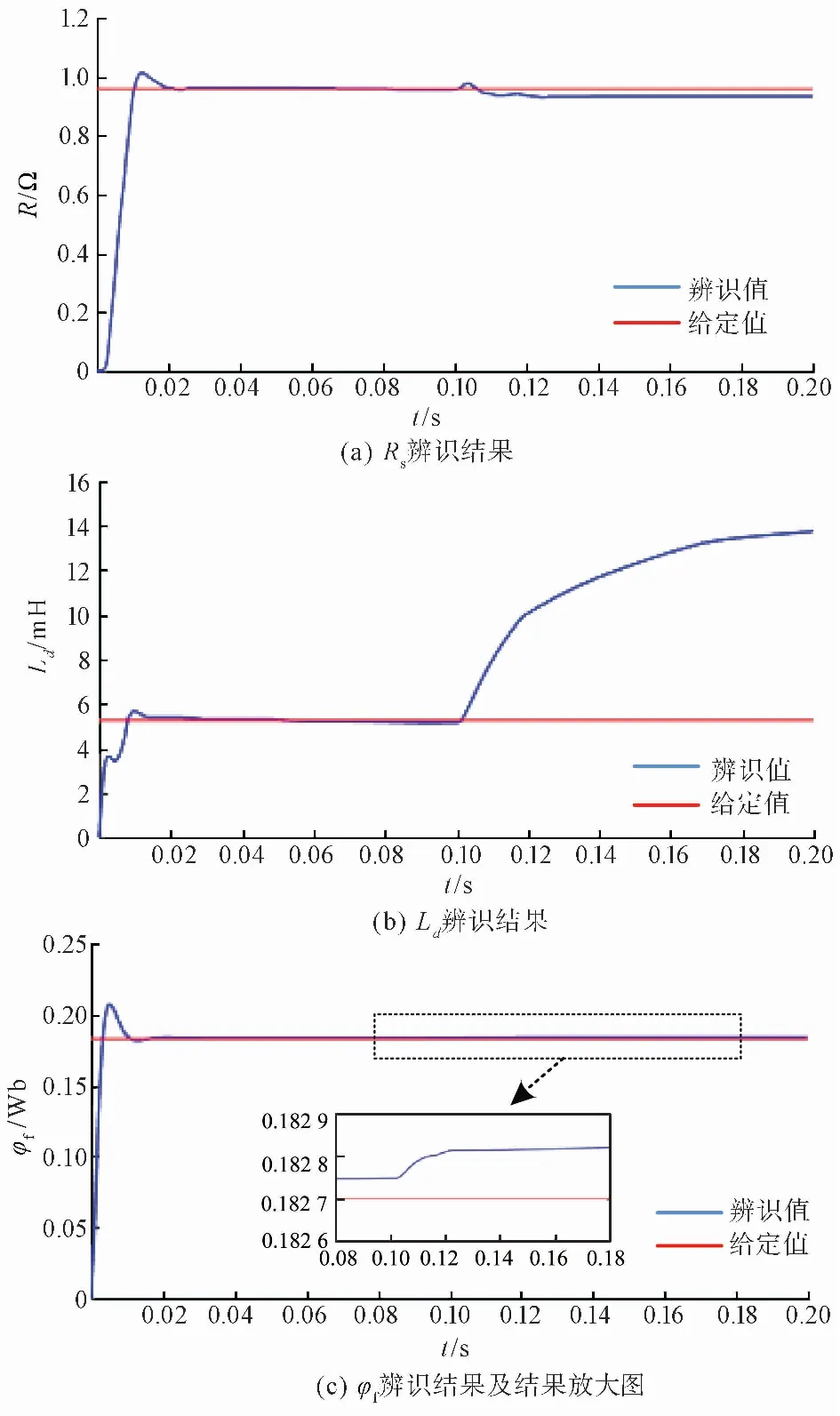
图 3 递推最小二乘法参数辨识结果Fig.3 Result of recursive least square method

图 4 多新息限定记忆最小二乘法参数辨识结果Fig.4 Result of multi-innovation limited memory least square method
观察可知,递推最小二乘法参数辨识结果在0.01s内收敛,而多新息限定记忆法收敛时间为0.008s,收敛速度更快,算法辨识精度在0.2%以内,相对递推最小二乘算法而言具有较高的辨识精度。
表 2和表 3分别为两种辨识方法的辨识结果分析。其中,加载辨识结果表示加载以后的0.12~0.2s时间段辨识结果的平均值,最大误差结果表示加载后辨识误差最大时的电机参数辨识值。

表 2 递推最小二乘法辨识结果Table2 Result of parameter identification by RLS method

表 3 多新息限定记忆最小二乘法辨识结果Table3 Parameter identification result of multi-innovation limited memory least square method
加入负载扰动后,采用递推最小二乘法同时辨识电机定子电阻、交直轴电感、磁链时,最终结果误差较大。而从图4中可以看出多新息限定记忆法辨识电机参数值依然能够在0.008s内重新收敛于真实值附近,最大辨识误差不超过0.6%,辨识结果变化率在0.4%内,抗干扰能力明显增强。
4 实验验证
4.1 离线辨识
采用交流电桥对电机各相绕组电阻Rs进行测量,电路原理图如图 5所示,将电桥a、b两点接至电机的两相,另一相开路。

图 5 电桥测电机电阻原理图Fig.5 Schematic diagram of measuring motor resistance by electric bridge
当对角线电流指针为零时,通过电桥平衡式(28)由已知的R0、R1、R2电阻阻值计算出电机绕组的相电阻阻值Rs为0.958Ω。
(28)
采用电感电容电阻(LCR)测试仪测量电机任意两相之间的电感,频率设置为10kHz,实时测算转子在不同位置时的电机绕组电感值,并记录过程中最大值Lmax和最小值Lmin,然后采用式(29)计算得到交直轴电感值Ld为5.25mH。
(29)
使用电机将被测电机作为负载电机拖动至固定转速,被测电机绕组开路,采用示波器读取不同转速下反电动势幅值eap,并用式(30)计算永磁体磁链值φf为0.182 7Wb。
φf=eap/ωe
(30)
4.2 改进算法辨识
通过实验验证仿真研究成果及算法可行性,在电机转速为750r/min,空载运行情况下,进行了在线参数辨识实验。短时空载运行情况下,电机电流能够控制在较小范围内,电机内部温升小,从而电磁参数变化较小,可以采用离线测量值作为辨识结果参考值。图 6为Rs、Ld及φf辨识结果波形。
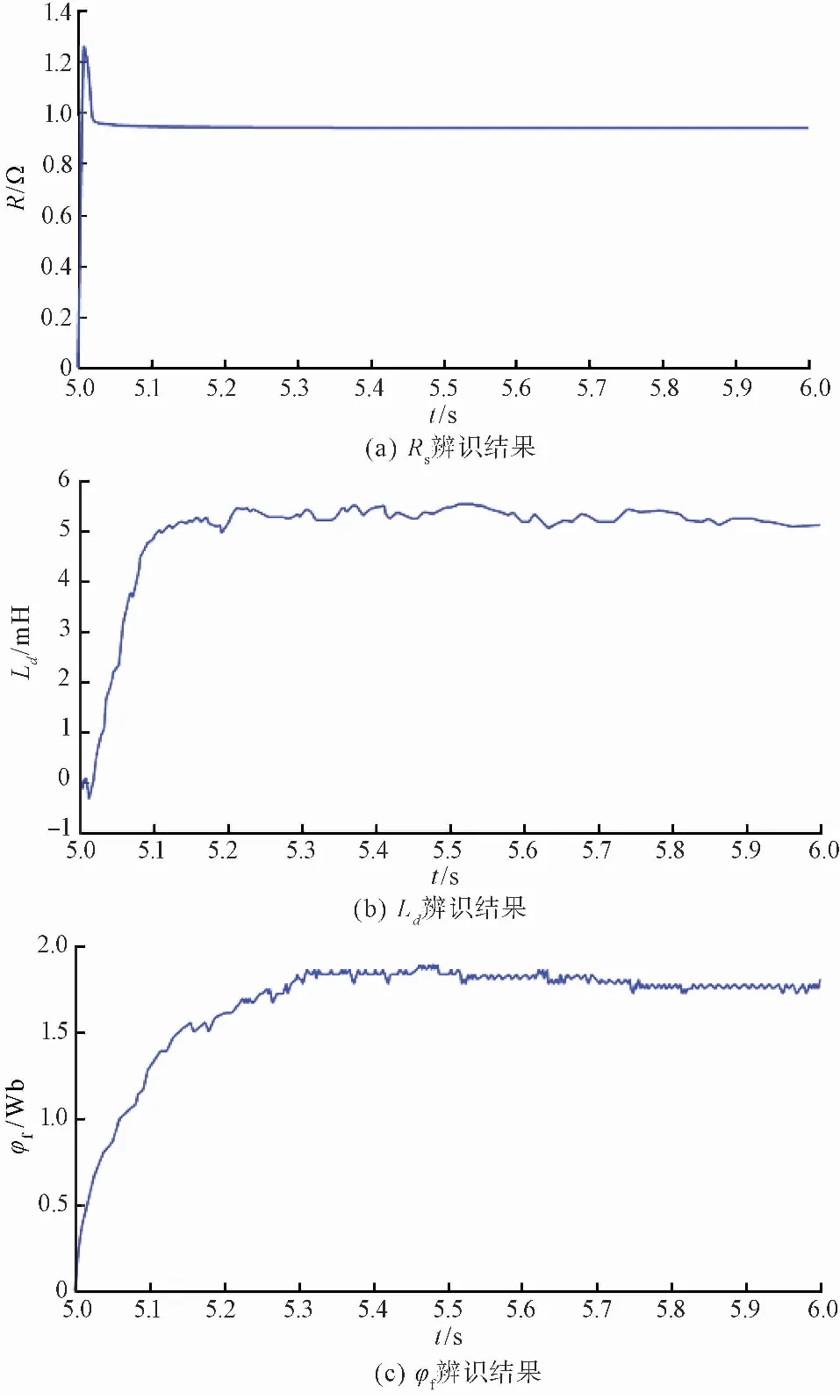
图 6 电磁参数辨识结果Fig.6 Identification results of electromagnetic parameters
由图 6 可知,系统从5.0s时开始对参数进行辨识,参数辨识结果在0.3s内收敛于离线测量结果附近。
表 4为仿真辨识结果和实验辨识结果与离线测量值的对比。采用改进算法进行试验验证,同时辨识电机定子电阻、电感、永磁体磁链时,参数辨识结果误差最小为0.095%,最大为4.2%。
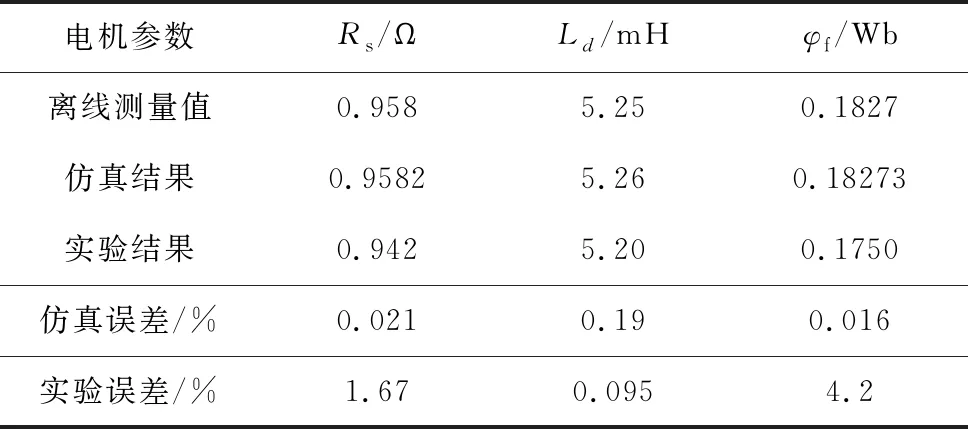
表 4 辨识结果对比Table4 Comparison of identification results
由表4可以看出,仿真辨识结果精度更高,实验辨识结果依然受模数转换及电路采样精度等硬件电路约束影响,相对仿真辨识结果精度较低。
5 结论
提出了一种基于多新息的限定记忆最小二乘算法的永磁同步电机参数辨识方法,在MATLAB/Simulink中搭建仿真模型,在电机运行转矩扰动情况下,采用所提出方法进行辨识,结果显示多新息限定记忆最小二乘法的辨识能够迅速、稳定地收敛于真实值附近,有效解决“数据饱和”及收敛速度慢等问题。通过实验证明了所设计辨识算法能够实现对电机电磁参数快速、准确的辨识,具有较好的跟踪性能和鲁棒性。
猜你喜欢
小学生学习指导(低年级)(2022年10期)2022-11-05
微电机(2022年8期)2022-10-12
传感器与微系统(2022年3期)2022-03-23
电源学报(2022年1期)2022-02-25
数学小灵通(1-2年级)(2021年10期)2021-11-05
通信电源技术(2021年9期)2021-09-23
语数外学习·初中版(2020年11期)2020-09-10
微电机(2020年7期)2020-08-01
电源学报(2020年3期)2020-06-28
小学生学习指导(低年级)(2019年9期)2019-09-25