
LOS/NLOS混合环境下的基于TOA测距的定位算法
2021-06-26 07:40刘正波
弹箭与制导学报 2021年2期
刘正波,朱 亮
(1 石家庄邮电职业技术学院智能工程系,石家庄 050000;2 河北大学数学与计算机学院, 河北保定 071002)
0 引言
通信、雷达以及声纳等领域均需利用测量值估计目标位置,如通过参考到达时间(time of arrival,TOA)、接收信号强度(received signal strength, RSS)以及到达角度去估计信号发射源(源节点)位置[1-2]。然而,目前多数研究工作只关注于视距环境(line-of-sight, LOS)下的定位问题[3]。实际上,源节点问题也涉及到非视距环境(non-LOS,NLOS),例如:源节点与传感节点空间可能被障碍物阻挡,就形成NLOS环境。因此,在实际环境中,可能同时存在LOS和NLOS的混合环境[4]。
目前LOS和NLOS的混合环境下的源节点定位的研究工作可分为数学优化[5-6]、稳健统计两类。文中以基于稳健统计的定位算法为研究内容。传统稳健的LOS/NLOS混合环境下的定位算法常采用最小中值平方(least median squares,LMedS)[7],M-估计[8-9]。同时,基于先验位置的定位算法也得到较深入研究;首先利用先验校正的源节点信息估计源节点位置,再将先验位置分布建模,形成高斯分布[10]。文献[11]依据先验源节点分布,并依据最小均方误差(minimum mean square error,MMSE)定位算法估计源节点位置。此外,文献[12]提出稳健的两步加权最小二乘(weight least squares,WLS)算法,但是该算法并没有对LOS和NLOS混合环境进行分辩。因此,文中提出先验位置信息的TOA定位算法。该算法引用负熵识别LOS/NLOS混合环境,以最小化MSE和惩罚函数估计源节点位置,并对比分析它们的性能。
1 问题描述
假定网络内有M个接收器(传感节点),1个发射器(源节点)。令[xiyi]T表示第i个传感节点的位置;[x0,y0]T表示源节点位置。在LOS/NLOS混合环境下,可建立式(1)所示的测量等式。在t时刻,第i个接收器所测量到源节点的距离为:
(1)


i=1,2,…,M,t=1,2,…,P
(2)
式中:M,P分别为传感节点数、对第i个传感节点的抽样数;(1-ε)为出现LOS噪声的概率;ε为出现NLOS噪声的概率,且0≤ε≤1。依据文献[13],ε的取值通常小于0.1。
由式(1)可得:
(3)

Ax+qt=bt,t=1,2,…,P
(4)
其中x=[x0y0R]T;qt=[m1,t,m2,t,…,mM,t]T;
2 提出的算法
2.1 负熵
引用负熵识别LOS和NLOS传感节点,令y为随机变量,其负熵J(y)为:
(5)
式中kurt(y)=E(y4)-3(E(y2))2。由于随机变量y越靠近非高斯分布,负熵越大,因此,通过负熵可以有效地测量非高斯分布[14]。
利用负熵识别传感节点是处于LOS或NLOS环境。当处于LOS,就称为LOS节点;否则,就称NLOS节点。如果传感节点的负熵大于预定阈值,该节点就为NLOS节点;反之,若小于预定阈值,就称为LOS节点。
2.2 基于MMSE的位置估计
引用MMSE算法,致使MSE估计误差最小。建立误差函数:
(6)
式中:x为需估计的未知矢量;V为b的期望值,可表示为:



(7)


(8)
在式(8)的基础上,再获取二步估计,如式(9)所示:
(9)

(10)


(11)
2.3 基于惩罚函数的位置估计
将惩罚函数引入成本函数,如式(12)所示:


(12)

(13)
(14)
最后,依据惩罚函数,可获取源节点位置的最终估计值:
(15)
3 性能仿真
3.1 算法的复杂度
由于矩阵求逆和乘法操作复杂度高于其他操作,下面只考虑这两个操作。表1显示了MMSE、两步WLS和惩罚函数(Penalty)三个算法的复杂度,其中g表示传感节点数;z表示需估计的参数数量。
从表1可知,相比于MMSE、两步WLS,Penalty算法的复杂度最高,原因在于:它需要频繁的逆运算。而两步WLS算法的复杂度最低,这主要是因为其在位置估计过程无需先验信息,如源节点位置的均值和方差。

表1 算法的复杂度
3.2 定位性能分析
在1 000 m×1 000 m区域内部署10个发射器(源节点)、7个接收器(传感节点)。发射器采用全向天线。每次仿真独立重复200次,取平均值作为最终试验数据。

(16)

7个传感节点的负熵如图1所示。预定的负熵值为0.13。第1~4个传感节点为LOS节点,而5~7传感节点为NLOS节点。

图1 7个传感节点的负熵


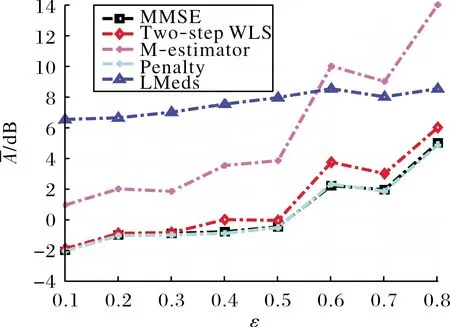
图2 随ε的变化情况
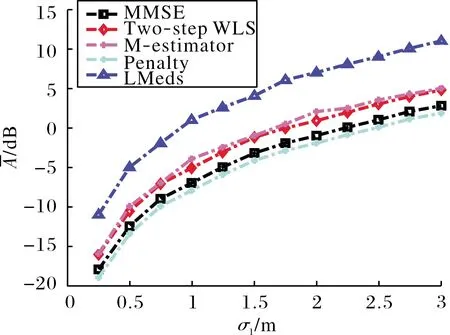
图3 随σ1的变化情况
4 总结
针对源节点位置估计问题,提出基于先验位置信息的TOA源定位算法。依据源节点的先验位置信息,包括均值和方差,再结合MMSE和惩罚函数估计源节点位置。试验分析表明,随着测量误差增加,提出算法的性能优于两步WLS算法。
猜你喜欢
传感技术学报(2022年7期)2022-10-19
今日农业(2022年15期)2022-09-20
北京大学学报(自然科学版)(2022年4期)2022-08-18
社会科学战线(2022年2期)2022-03-16
社会科学战线(2022年1期)2022-02-16
客联(2021年9期)2021-11-07
海外文摘·艺术(2020年22期)2020-11-18
华东师范大学学报(自然科学版)(2020年1期)2020-03-16
华东师范大学学报(自然科学版)(2019年2期)2019-06-11
分析化学(2017年12期)2017-12-25
