
高分辨雷达距离扩展目标自适应检测性能研究
2021-06-26 07:40李楠
弹箭与制导学报 2021年2期
李 楠
(西京学院信息工程学院,西安 710123)
0 引言
雷达发展到现在,其功能不限于目标探测和测距,还有目标高度和速度的测量、目标跟踪和识别、成像等,雷达成像有一维距离像、合成孔径(SAR)和逆合成孔径(ISAR)、三维成像等。雷达诸多功能中目标检测是其基本任务,在当前的相控阵雷达中,利用多通道发射/接收组件,通过控制相位实现波束扫描,能很好地获得雷达目标数据,结合信号处理技术可提高雷达目标检测性能。随着雷达带宽不断扩展,进一步提高了雷达目标距离分辨力,这就出现了距离扩展目标的检测问题,相应的出现了各种目标检测器。
针对距离扩展目标检测问题,文献[1]对不同杂波背景下的目标,研究了非高斯杂波中起伏目标的检测问题。文献[2-3]研究高斯噪声中基于正态分布检验的距离扩展目标检测算法。文献[4]研究稀疏距离扩展目标自适应检测问题,分析自适应检测器AD,建立AD-SCM和AD-NSCM检测器,并分析其检测性能。文献[5]提出归一化匹配滤波、非线性映射和高阶互相关积累结合的目标检测方法。诸多文献从不同杂波分布的角度对距离扩展目标的检测问题进行了研究和分析,建立了不同的目标检测器[6-17]。文献[9]提出S-GLR检测器,优点是适应高斯化的观测数据,但对其它数据分布形式则检测性能下降。文献[13]提出R-GLRT检测器和R-Wald检测器,适用于训练样本不足的情况,缺点是要对噪声协方差矩阵进行分解和降秩处理,增加了运算量。文献[14]提出RAGLRT-GCC检测器,利用杂波分组信息,提高对稀疏扩展目标检测能力,缺点是计算复杂度进一步增大。文献[18-19]则介绍了雷达目标检测问题的发展趋势。综上,所提出的检测器都是针对特定噪声环境,普适性不强。文中分析自适应检测器来克服不同的噪声环境对检测器影响。
雷达目标自适应检测就是在各种复杂的背景杂波下检测出目标的有无,目标检测的核心问题就是研究杂波的模型,构建合适的目标信号检测器。列出带辅助数据估计的雷达目标检测模型,并给出目标检测器,分析距离扩展目标检测概率和雷达杂波的各种分布规律,最后将目标检测器同其它目标检测器进行了性能比较研究,得出了有关结论。
1 信号检测模型及检测器
设由N个传感器获得距离扩展目标观测数据,目标位于K个距离单元的观测数据zt(主数据)中,利用P个辅助数据估计未知杂波协方差矩阵,辅助数据不含目标回波。杂波背景下距离扩展目标的检测可用下述二元假设检验进行说明:
(1)
式中:观测向量zt、噪声向量nt、目标信号向量st的维数都是N×1;H0是只有噪声的假设;H1是目标加噪声的假设。辅助数据噪声向量假定服从均值为零协方差矩阵是Σ的独立同分布,nt~(0N,Σ),这里0N是N×1维零值向量,假设主数据中噪声向量服从nt~(0N,ρΣ)分布,ρ是主数据同辅助数据噪声向量的功率比。
设目标信号向量st在观测向量zt的子空间中,即st是r个维数为N×1的独立向量线性组合:
st=Hθt,t=1,2,…,K
(2)
其中,矩阵H由r个基向量组成,维数是N×r,向量θt是距离单元t目标散射点坐标向量,维数是r×1。对高斯型的散射点向量θt服从(0r,M)分布,在不同的距离单元处散射点是独立同分布的,M是半正定协方差矩阵,其维数是r×r,目标信号向量st服从(0N,HMHH)分布,“(·)H”是共轭转置。
这里为了分析问题方便,假定噪声协方差矩阵Σ=IN,前述式(1)可化为:
(3)
二元假设检验其广义似然比检验(GLRT)为[6]:
(4)
当λ≥T,拒绝H0;
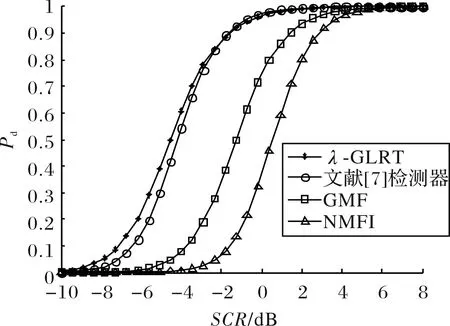
当λ 其中,T是检测阈值。 文献[6]给出了基于GLRT的自适应检测器: (5) 上述检测器是噪声协方差矩阵已知情况下推导出来的,当噪声未知时,可基于辅助数据对噪声协方差矩阵进行估计,其表达式为: (6) 对噪声未知的距离扩展目标检测时,其自适应检测器λ-GLRT的公式如式(7)。 (7) 利用辅助数据白化处理可获得噪声分布规律,上述获得的目标检测器具备对噪声的自适应能力。 积累检测算法的过程是设置一个位置可变化的滑动窗θw(窗口长度w=w0+1),对窗内的各距离单元样本幅度求平方和,将其和视为检验统计量,再将其同检测门限比较。 (8) (9) 当有目标的情况下,假设目标上强散射点有M个,各散射点对应的雷达距离回波信号强度是Am(m=1,2,…,M),检验统计量则是: (10) (11) 式中 (12) 其中SCRm(m=1,2,…,M)是距离单元信杂比。 在恒虚警概率Pf的情况下目标检测概率Pd为: (13) 由式(13)可见目标的检测概率由检测门限(虚警概率)和距离单元信杂比唯一确定。 在高斯杂波下最优的检测器是AMF检测器;在严重拖尾的杂波下检测性能最优的是ANMF检测器[12];利用辅助数据进行杂波估计,计算杂波协方差矩阵,所得检测器λj检测性能较优。 对不同杂波背景下的目标进行检测性能分析,并对影响检测性能的参数进行总结,从而指导实际雷达目标检测的应用。仿真过程中,假定虚警概率Pf=10-3,检测阈值和检测概率采用Monte Carlo法计算,仿真次数是105。辅助数据杂波协方差矩阵Σ和目标散射点协方差矩阵M采用指数相关结构构造,其元素分别为: (14) 式中:σ是辅助数据杂波功率水平;γ是杂波一阶相关系数;φ是目标信号散射点一阶相关系数;N是阵元数目;r是散射点矩阵特征值个数。 表1 目标散射点能量分布模型 (15) 目标1是能量均匀分布在h0个距离单元内,目标2~目标4是有一个能量最强的距离单元,其余均匀分布在h0-1个距离单元,目标5是点目标情况。图1~图4给出了不同条件下检测器λ-GLRT的扩展目标检测性能曲线。 图1 不同目标,γ=0,N=4,h0=10时,λ-GLRT检测曲线 图2 目标1,γ=0,N=4,h0=10时,不同杂波下检测曲线 图3 目标1,γ=0,h0=10时,不同阵元下检测曲线 图4 目标1,γ=0,h0=H时,不同距离单元下检测曲线 利用文中检测器λ-GLRT检测目标1~目标5性能曲线如图1所示,图中给出不同目标能量分布对检测率的影响。当目标散射点能量均匀分布时,λ-GLRT检测性能最优;目标能量集中时,λ-GLRT检测性能急剧下降;当目标成为点目标时,检测损失最大。其原因是点目标时,检测统计量仅对杂波距离单元积累,产生坍塌损失。 以目标1为研究对象,在杂波分布不同情况下检测器检测性能曲线如图2所示。从图2发现,瑞利、高斯、韦伯、K分布几种杂波分布模型对带有辅助数据的自适应检测器检测性能影响不大,其检测率均较高,即带辅助数据的检测器对杂波分布不敏感,其原因为杂波的矩阵协方差估计是利用了目标信号杂波背景进行估计。 图3给出阵元数N=2,4,8,16,32时λ-GLRT检测性能的变化曲线,由图可见,随着阵元数的递增,检测器检测性能逐渐增加。检测性能的提升原因是随着阵元数的增加,检测能量进一步积累,获得了检测率的提高。 图4给出检测距离单元h=2,4,8,16,32时λ-GLRT检测性能变化曲线。从图4可见,λ-GLRT检测器检测性能随着h的增大逐渐提高,h越小,目标散射点进一步稀疏,坍塌损失进一步增大。说明不同的目标散射点密度会对λ-GLRT检测性能产生一定的影响。 图5是在γ=0,φ=0.5,r=3,ρ=1,σ=1,h0=h=10的条件下,对λ-GLRT、文献[7]检测方法、GMF及NMFI检测器检测性能进行对比分析的结果。从图中可见,在目标散射点密集、检测距离单元较大的条件下,检测率Pd≥0.5时,λ-GLRT检测器需要的信杂比低于文献[7]检测器、GMF检测器和NMFI检测器,目标检测优势明显。λ-GLRT检测器同文献[7]的检测率接近,在信杂比低于-4 dB时,文中检测概率高于其它检测算法,信杂比高于-4 dB时,检测性能的优劣顺序为文献[7]方法、λ-GLRT检测器、GMF检测器、NMFI检测器。低信杂比条件下文中检测率高的原因是利用辅助数据来代替接收数据中的杂波分量,更能体现空间中信号的实际情况。 图5 不同检测器检测曲线对比 为说明文中检测器的检测性能,采用文献[7]中的实测数据进行距离扩展目标的检测性能分析。图6给出了实测数据下不同检测器对距离扩展目标的检测曲线。检测曲线表明,实测数据在辅助数据的配合下,文中自适应检测算法和文献[7]方法目标检测率接近,均高于GMF检测器和NMFI检测器。 图6 实测数据下几种检测器性能对比 针对高分辨雷达在各种杂波背景环境下对距离扩展目标的检测问题,提出基于辅助数据矩阵估计的距离扩展目标检测器λ-GLRT,利用已知噪声协方差矩阵得到目标检测器,再结合辅助数据估计噪声协方差矩阵,将估计矩阵代入检测器,最后得到适应杂波背景环境的最优目标检测器。2 距离扩展目标检测概率分析


3 性能分析







4 结束语
猜你喜欢
成都信息工程大学学报(2022年2期)2022-06-14
测控技术(2022年4期)2022-04-27
舰船电子工程(2022年1期)2022-02-12
舰船电子对抗(2020年5期)2020-11-26
科技风(2018年15期)2018-05-14
数学学习与研究(2018年3期)2018-03-14
考试周刊(2016年54期)2016-07-18
现代电子技术(2015年10期)2015-05-29
现代电子技术(2009年7期)2009-06-25
