基于神经网络的荧光油膜厚度与灰度研究
2021-06-26 08:28钱泓江董秀成徐椰烃蒋金洋陈桂芳
南京航空航天大学学报 2021年3期
钱泓江,董秀成,徐椰烃,蒋金洋,陈桂芳
(西华大学电气与电子信息学院,成都610039)
利用荧光油膜在激光照射下的显色反应,由荧光油膜灰度表征出油膜厚度这一关键因素,进而通过得到油膜厚度解算该处的摩阻分布。早在1977年,由Tanner[1]提出通过油膜的激光干涉来测量表面摩阻,为摩阻的简化测量提供了坚实的基础。1993年,Monson等[2]对油膜干涉法进行完善,油膜干涉理论发展成熟。而1999年,Brown等[3]精确建立了在流体表面摩擦应力作用下的油膜演化方程,形象地表征出了油膜厚度随时间的变化率与其自身体积力、摩阻等因素的关系。对使用油膜进行全局摩阻的直接测量提供了可能性。在2008年,由Liu等[4]提出用荧光油膜的灰度成像来表征油膜厚度这一新方法,建立了荧光油膜灰度与厚度的线性模型,该模型提供了理论基础,但还无法直接用于工程测量中。2011年,李鹏等[5]将荧光油膜灰度与厚度线性方程引入相对表面剪切力模型,得出相对剪切力与成像平面灰度分布间的映射模型,为进行全局剪切力直接测量方法的研究和建立求解模型提供了有利的基础。2012年,李鹏[6]提供了较为简便的数据采集方法,他通过用盖玻片和载玻片等高透光光学玻璃构成斜面进行荧光油膜灰度、厚度标定数据的采集,并初步验证了该线性关系的正确性。
在标定过程中,一般选择插值法或数据拟合的方式来处理数据使其平滑。传统的插值法或者数据拟合的方式在一般厚度(如毫米级)的条件下比较实用,但是在面对高精度(如微米级)时,则需要进行算法改进来达到精度要求,其改进的过程较为繁琐,也存在着一定的困难,而两者都有各自的缺点,比如数据拟合方式,由于该方法不一定通过所有数据点,在精度方面也存在一定的局限性;传统插值法在靠近数据两端点插值时,会存在“龙格现象”[7],为了避免该问题,则采用分段插值形式。
本次采用神经网络对荧光油膜建立模型,针对神经网络对单输入、单输出模型有较好预测的特点,与传统插值法结果进行比对,验证了通过神经网络建立预测模型,有精度更高、预测更准确的优势。
1 实验理论分析
1.1 插值法原理
本次采用一元全区插值法进行荧光油膜灰度与厚度关系的模型建立,其数学模型表示为

式中:xi从属于n个结点,xj为不同于xi的其他结点。通过7次拉格朗日插值计算求得插值点t处的函数近似值z,且插值点t在该n个结点中(n=8)选取满足

当插值点t位于区间外时,则属特殊情况,将取该端的n2个结点进行插值计算。
1.2 BP神经网络
BP神经网络为多层前馈网络,遵循误差反向传播训练机制,围绕梯度下降法中心思想展开,采用梯度搜索方法[8],最终目标是使实际输出值与期望输出值的误差均方值达到最小。
BP网络结构如图1、2所示。图中k为迭代次数,u(k)及y(k)为网络的输入。y(k)为受控对象实际输出,yn(k)为网络的输出。参考文献[9]的方法,将受控对象实际输出y(k)及输入u(k)的值作为整个网络的输入,并将系统输出与网络输出的误差目标函数作为神经网络调参标准,从而搭建网络。

图1 BP神经网络逼近的结构Fig.1 Structure of BP neural network approximation
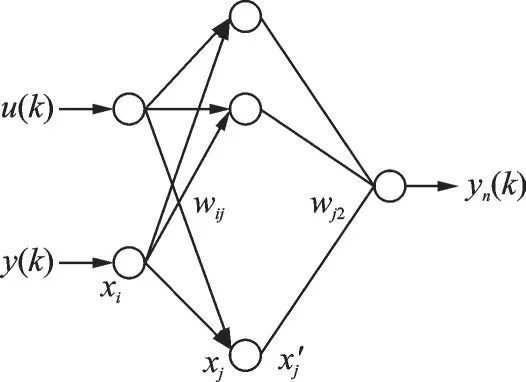
图2 用于逼近的BP网络Fig.2 BP network for approximation
前向传播是网络的输出运算过程,隐层神经元的输入过程实际为所有输入的加权函数求和过程,令隐层神经个数为q,则有

式中:wij为网络层间连接权值;xj为限层结点;xj为输入层结点。
取yn(k)=xk,则网络的输出与预想输出的误差为

误差性能指标函数为

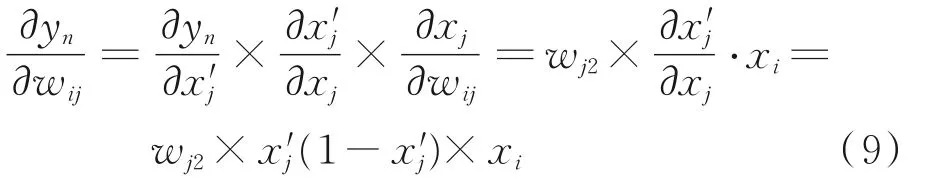
逆向传播通过δ学习算法,对各层间的权值进行调整。输出层与隐层的连接权值计算为

式中x'j为激发函数。k+1时刻网络的权值为

隐层及输入层连接权值计算为

式(8)中的权值梯度为
k+1时刻网络权值为

当上一次的权值对本次权值产生了影响,就需加入约束因子α,此时的权值有

式中:η为学习速率,α为约束因子,η∈[0,1],α∈[0,1]。雅可比矩阵(输入输出灵敏度信息)算法表达式为

1.3 ELM机器学习算法辨识原理
极 限 学 习 机(Extreme learning machine,ELM)神经网络较BP神经网络具有更高的精度和运算速度[10]。令有N个任意样本(Xi,Ti),其中Xi=[xi1,xi2,…,xin]T∈Rn,Ti=[ti1,ti2,…,tim]T∈Rm,则对于有P个隐层结点的单隐层神经网络为

式中:g(x)为激活函数,Wi、βi分别为输入、输出权重,bi为偏置。该网络目标函数为

则可得矩阵形式

式中:H为隐层输出,β为输出权重,K为期望值。训练过程中得到

可得损失目标函数

1.4 Hopfield神经网络参数辨识原理
假定用于参数辨识的约束函数与Hopfield网络约束函数相等,对其状态方程矩阵进行分解变换可得网络的权值矩阵W和神经元外输入矩阵I,将其代入网络状态方程式进行运算,收敛状态可得到较稳定的辨识参数结果。令一个系统的状态方程为

式中:A、B为待辨识的参数矩阵,取P=[A11A12A21A22B21B22]T,x=[x1x2]T,令x为状态矢量,u为控制输入,则其参数辨识过程就是对向量p的求解过程。设可调系统为



定义基于状态偏差变化率的系统参数辨识函数为

Hopfield网络约束函数趋于收敛的过程,就是估计矩阵θ1和θ2接近实际矩阵A和B的过程[11]。网络第i个神经元的动态微分方程满足
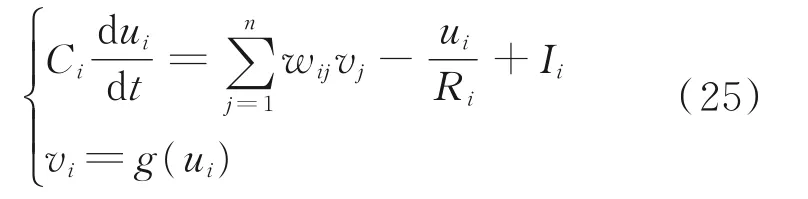
令Ri→∞,并取Ci=1,则状态方程可以转换为

Hopfield网络的约束函数为
由于Ri→∞,取Hopfield网络的输出等于待辨识参数,则

由式(26)和式(28)可以看出,有

取参数辨识的约束函数与Hopfield网络约束函数相等[12⁃13],即E=EN,则由式(29)可得

通过E=E1+E2,可以换算为

通过式(32)解出权值W和I。

将式(33,34)的W和I代入式(26),可得到稳定的ui,最终辨识结果的输出为

2 实验结果与讨论
2.1 荧光油膜标定过程
荧光油膜的标定过程是一个数据实时采集的过程,本次通过搭建载玻片斜面的方法进行油膜灰度与厚度相关信息的采集[6],为了方便像素点的读取和像素单位的转换,对相机采集的荧光油膜灰度图进行了网格化处理,如图3、4所示。图4中间的红色线条则表示本次的荧光油膜灰度与厚度数据采集部分,且该网格x、y轴像素间隔均为16像素。
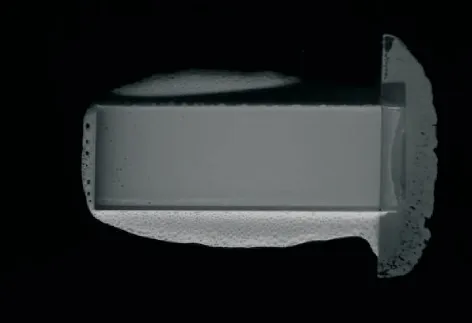
图3 荧光油膜灰度图Fig.3 Grayscale of fluorescent oil film

图4 油膜网格图Fig.4 Oil film grid
由盖破片和载玻片构成的斜面所采集的数据并不是直接为荧光油膜灰度与厚度的关系数据,而是灰度与横坐标x长度的关系,还需进行三角变换处理,如图5所示。可以得到

图5 斜面三角变换Fig.5 T ransformation of slope trigonometric

采集的初始数据经几何变换处理,如表1、2所示。

表1 荧光油膜灰度及厚度初始数据Table 1 Initial grayscale and thickness of fluorescence oil filmmm
2.2 神经网络预测
2.2.1 BP神经网络预测
将标定实验得到荧光油膜灰度与厚度初始数据(表1)作为神经网络的训练数据来源,神经网络设置的结构为1⁃4⁃4⁃1⁃1,网络的初始权值取随机值,其训练过程如图6所示。网络的训练次数为500次,训练的神经网络、结果误差图分别如图7、8所示,实验中可以通过不断调整训练次数、最小误差以及权值等参数来使神经网络模型达到最优值。

图6 训练过程图Fig.6 Training process diagram

图7 神经网络训练Fig.7 Neural network training

图8 误差曲线Fig.8 Error curves
将训练好的模型通过表2中的测试数据来进行预测,其预测结果如图9所示。

表2 荧光油膜灰度⁃厚度测试数据Table 2 Test data of gr ayscale and of thickness of fluorescence oil film

图9 BP神经网络预测结果Fig.9 Prediction results of BP neural network
2.2.2 ELM神经网络预测
ELM网络较BP网络具有运算速度快的优势,且精度较高,训练模型的预测结果如图10所示。

图10 ELM神经网络预测结果Fig.10 Prediction results of ELM neural network
2.2.3 对比分析
绘制BP神经网络、ELM网络及传统插值法预测曲线,如图11所示,然后将预测值与真实荧光油膜厚度值进行比较便可以得到预测误差,分析神经网络的预测精度。各算法预测数据结果如表3所示。

表3 神经网络与插值法预测数据及其误差比较Table 3 Comparison of prediction data and error of neural network and interpolation method

图11 数据预测对比Fig.11 Comparison of data prediction
由表3中的数据可以直观看出,ELM神经网络的误差低达5.150%,而传统插值法的误差最大,为5.935%,故通过神经网络建立预测模型具有一定的优势,且无需分析模型理论结构;与此同时,BP神经网络的误差为5.485%,相较ELM网络的误差较高,故ELM神经网络在模型预测方面比BP神经网络占据一定优势,且运算速度快;经实验分析,通过神经网络建立预测模型,较传统插值法的精度有一定的提高。
2.3 Hopfield神经网络参数辨识
Hopfield神经网络进行模型的参数辨识,需要根据经验公式或者手册给出初定的参数值[13]。引用Liu[4]提出的数学模型,有

式中:I(x,y)为荧光亮度(灰度值);Iex(x,y)为初始光强;h(x,y)为荧光油膜的厚度;a为荧光效率等参数。因为影响油膜灰度值的因素不止油膜本身的厚度因素,还有周围环境因素以及油膜的自身特性,如浓度,所以对该线性模型做变换,可以得到

因影响因素可能为非线性系统和常数,所以ni、mj系数定义为影响因素的权重系数,根据经验式,可以得到假定影响因素参数,如表4所示。

表4 影响因素的假定权重参数值Table 4 Assumed weight parameter values of influencing factor s
通过Hopfield神经网络参数辨识,可得以下辨识结果,如图12~14所示。

图12 紫外光源功率参数辨识Fig.12 Power parameter identification of UV light source
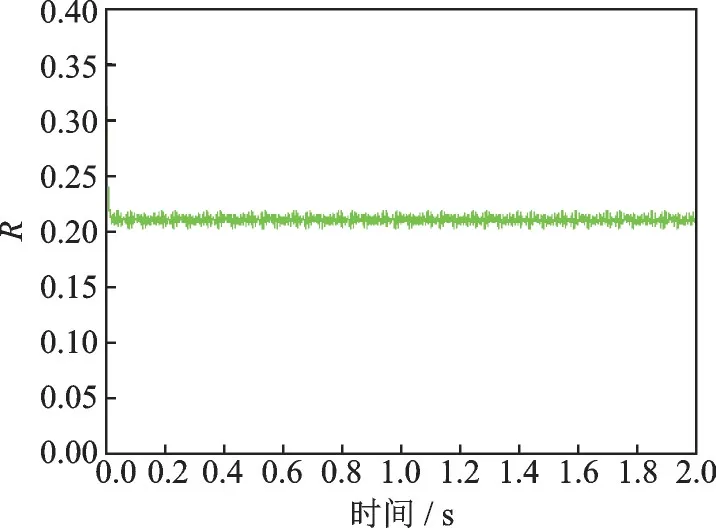
图13 紫外光源距离参数辨识Fig.13 Distance parameter identification of UV light source

图14 曝光系数参数辨识Fig.14 Identification of exposure coefficient parameters
通过Hopfield神经网络所辨识的结果参数如表5所示。

表5 辨识后的参数值Table 5 Parameter value after identification
通过Hopfield神经网络进行参数辨识,能够很好地找出功率、光距和曝光系数等参数对荧光油膜灰度成像的影响程度,且辨识结果误差范围在1%左右,达到实际工程应用的标准。
3 结 论
经过实验分析论证,ELM神经网络模型、BP神经网络模型及插值法模型的预测误差分别为5.150%、5.485%和5.935%。通过神经网络搭建模型较传统插值法精度有所提高;而ELM神经网络具备比BP神经网络运算速度快、精度更高的优势。利用Hopfield神经网络进行参数辨识,其辨识得到参数的误差均控制在1%左右,后续可以继续调整Hopfield神经网络的参数,使误差率达到期望的效果。与传统插值法进行对比,利用神经网络搭建模型可以获得更高的精度,为后续荧光油膜灰度与厚度研究提供了一种可行的方法。
猜你喜欢
成都信息工程大学学报(2022年3期)2022-07-21
测绘技术装备(2022年1期)2022-05-11
中国新技术新产品(2021年3期)2021-04-15
邮电设计技术(2021年2期)2021-03-13
小读者之友(2020年11期)2020-12-23
全球定位系统(2020年5期)2020-11-18
计算机与数字工程(2019年11期)2019-11-29
智富时代(2019年7期)2019-08-16
智富时代(2019年7期)2019-08-16
润滑与密封(2019年4期)2019-04-22