一种履带式载物爬楼机
2021-06-28 12:24董兵兵黄浩青周军江倩晨阳慧张军
电子测试 2021年2期
董兵兵,黄浩青,周军,江倩,晨阳慧,张军
(安徽新华学院,安徽合肥,230088)
0 引言
在旧小区,低层楼房等无电梯或电梯空间不足的情况下,搬运大件货物成为了一个让人头疼的问题。例如在搬运洗衣机、电冰箱、电视机等大件重量级物品时,由于人的体力限制导致效率低下且成本较高,对此情况应用履带式载物爬楼机代替人力能实现高效省力搬运货物的目的。目前市场上较为普遍的爬楼装置为三轮滚动式爬楼机,该类产品的3个滚轮绕着一根主轴均布,靠主轴的转动驱动3个滚轮依次与楼梯的上下两个台阶面接触,加上人力牵拉,实现爬楼的动作。虽然一定情况下实现了载物爬楼的功能,但其仍存在以下缺点:1)爬楼时装置与台面的接触点只有2个,稳定性较差,具有一定的危险性。2)为了适应爬楼,该类产品的载物台全为倾斜放置,仍需人为调节角度与重心位置。
为了现有装置中的不足,本文设计了一种履带式载物爬楼机,既能平稳的运载大件货物又不需人力作为辅助拉力,能够确保货物安全稳定且省力的运到指定楼层。
1 履带式载物爬楼机的整体结构组成
图1为履带式载物爬楼机的整体结构。整台装置由载物台、平面支撑机构,角度调节机构以及控制系统等4个部分组成。
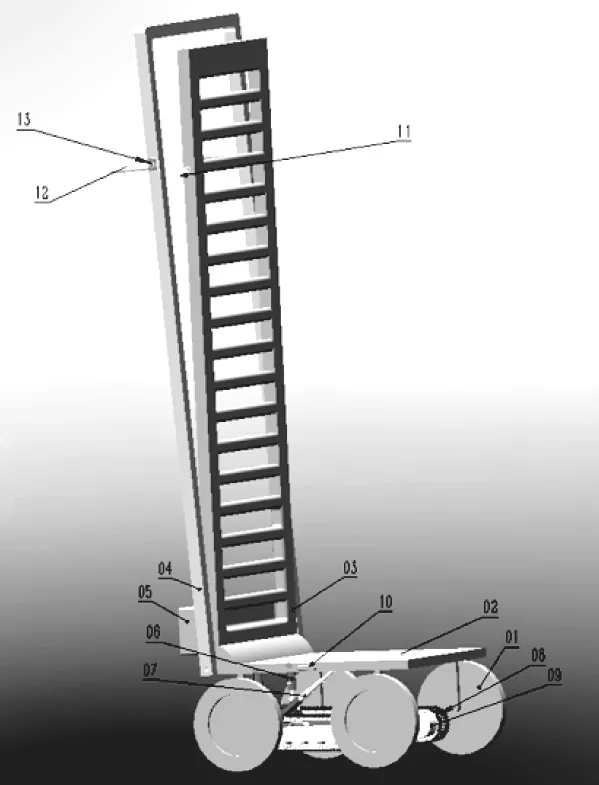
图1 履带式载物爬楼机的整体结构
(1)载物台:02.载物台承载运输的货物,将货物捆绑在03.垂直挡架上,确保运行中的稳定性。
(2)平面支撑结构:由前后四个01.车轮组成,用于平地上的水平运动。
(3)角度调节机构:由10.倾角传感器06.07.液压杆组成,用来调节载物板与水平面的角度。通过调节04、11、12来进行人为辅助。
(4)控制系统:05.控制系统中包括液压系统,单片机控制系统,配电系统,和13.控制开关。
最底端由四个轮子01做支撑,四个轮子与载物台02相连,03.垂直挡板与载物台为一体,推车架04安装在垂直挡板的两边,控制系统05中包括液压系统,单片机控制系统,配电系统等,液压活塞杆06.垂直与载物台安装,液压活塞杆07安装在履带地板上并成一定的角度。另一端与载物台的底部相连并保留旋转自由度。履带08与伺服电机09配合安装,不爬楼的情况下处于悬空状态。伺服电机09、履带及履带底板配合安装,倾角感应器10安装在载物台的一侧或者底部,推车架调节杆11位于垂直挡板的上部,把手12与开关13位于推车架上的中上部位,且开关位于把手的旁边。
2 履带式载物爬楼机的工作原理
2.1 平地行驶阶段
如图1状态所置,01车轮接触地面。08履带与地面不接触,并保持有一定的距离。13控制开关处于关闭状态,通过调节04、11调节推车架的角度,人工推动推车架来完成装置载物运载功能。
2.2 由平地向楼梯过渡阶段
载物爬楼机由人工推至楼梯前,打开控制开关,06与07液压杆同时动作,液压活塞杆伸出,致使履带接触地面并使01车轮与地面分离,伺服电机动作,带动履带转动。履带与楼梯相接触并带动载物台一同向楼梯方向运动,在向上运动过程中,通过10倾角感应器检测载物台所在平面与水平面所成角度,传递信号给控制系统,控制系统根据感应器所传输的信号进行数据分析,利用单片机调节系统调节流量控制阀流量的大小进而调节07液压杆伸出的速度,06液压杆保持不动作,倾角感应器,控制装置和液压系统协调工作,以保证02载物台始终保持水平(载物台所在平面与水平面所成夹角保持在所设定角度之内),直至整个装置脱离水平地面完成平地至楼梯的过渡阶段。
2.3 爬楼梯阶段
从平面向楼梯过度阶段完成后开始进入楼梯阶段。在爬楼梯阶段履带与楼梯相接触并稳步运行,载物板始终保持与地面平行,由于楼梯的尺寸大小不完全一致导致载物台会跟着履带一起倾斜,此时图2中固定在载物台上的倾角感应器检测到载物台所在平面与水平面之间所成夹角超出所设定值时,倾角感应器向控制系统传出数据,05控制系统根据倾角感应器所传输的信号进行数据分析,利用单片机控制系统控制液压系统中的换向阀来调节液压油的流向进而调节07液压杆的伸缩,从而起到在爬楼梯过程中调节载物台所在平面与水平面之间所成角度的作用,以达到在爬楼梯的过程中载物台始终保持与地面平行状态,确保货物可以安全平稳的被运载。为更进一步确保载物爬楼时的安全性,可人工牵引图1中的把手12进行人工牵引,以防系统故障而造成意外事故的发生,人工在牵引的过程中不需要消耗大量的体力,一个人就可以轻松操作完成,大大节省了人力物力的同时还能确保运载货物时的稳定性。

图2 履带式载物爬楼机底座(局部)
2.4 由楼梯向平面过渡阶段
当载物爬楼机将货物运输到楼梯的最顶端准备进入平面阶段时,人为将载物台向平地方向倾斜,由于倾角感应器检测到载物台所在平面与水平面之间的角度增大,控制系统使液压系统工作,控制液压油的流向使07液压杆收缩,此时履带继续转动,直至将载物台的重心由楼梯移至平地,停止人工倾斜载物台的动作,此时由于载物台与地面之间仍有夹角,07液压杆继续收缩直至载物台所在平面水平,履带式载物爬楼机全部进入平地阶段。此时履带完全接触地面,01车轮悬空。当装置完全进入平地时,按下图3所示13.控制开关,06.07.液压杆同时协调收缩,直至车轮接触地面,履带悬空至所设定距离时06.07.液压杆停止收缩。此时装置全部位于平地上。
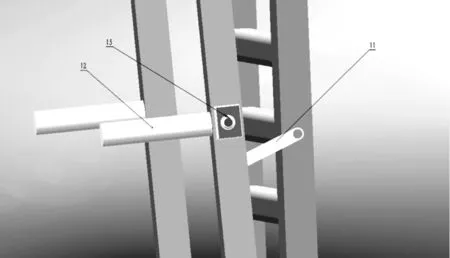
图3 把手及控制开关(局部)
此时履带式载物爬楼机爬楼结束,进入平地阶段,在平地阶段主要以人工推行前进。考虑到每个人的身形都大不相同,在推车的部位做了设计,将推车部位设计成可调节式的,11.推车架调节杆是活动可调节装置,一段固定在03.垂直挡架上,但保留旋转自由度,另一端与04.推车架相连,当推车架调节到与垂直挡板所需角度时将11.推车架调节杆固定卡在推车架上。此时11.推车架调节杆、04.推车架与03.垂直挡架三者构成三角形,利用三角形的稳定性,有效的提高了在平地进行过程中装置的稳定性以及工人在推车时的舒适性。
3 结束语
本文所设计的履带式载物爬楼机在平地行驶时依靠四个轮子做支撑,在平地向楼梯过度阶段,爬楼梯阶段以及从楼梯向平地过度阶段,控制系统可对载物台的角度进行调节,使得载物台始终保持在水平位置,以确保装置在载物爬楼阶段的平稳运行,实现了货物的安全、平稳运载。
猜你喜欢
包装工程(2022年11期)2022-06-20
物流技术(2021年5期)2021-06-01
新教育论坛(2019年14期)2019-09-10
大众摄影(2018年7期)2018-07-05
机械设计与制造(2018年2期)2018-03-05
青岛画报(2018年1期)2018-02-23
方圆(2017年24期)2018-01-17
电子制作(2017年14期)2017-12-18
表面工程与再制造(2016年2期)2016-12-18
电子世界(2014年23期)2014-10-21