
一种人工智能迷宫穿梭电脑鼠
2021-06-28 00:46龙行杜强王宁杨荃文
现代信息科技 2021年1期
关键词:结构设计
龙行 杜强 王宁 杨荃文
摘 要:作为微型轮式机器人,电脑鼠能够自主地求解迷宫。文章对电脑鼠车身结构进行了研究,通过加入新型双层吸盘装置增大压力,提高电脑鼠在迷宫穿梭时的速度,降低电脑鼠高速运行下打滑的风险;对算法控制等方面的研究与改进,电脑鼠能够在迷宫中找到从起点到终点的最佳路径。在当今智能社会的发展趋势下,电脑鼠具有广泛的实用价值,其技术可以推广到自动导航和避障机器人等多个行业。
关键词:轮式机器人;电脑鼠;结构设计;算法控制
中图分类号:TP301.6;TP242.6 文献标识码:A 文章编号:2096-4706(2021)01-0168-04
An Artificial Intelligence Maze of Shuttle MicroMouse
LONG Hang,DU Qiang,WANG Ning,YANG Quanwen
(School of Information Science and Engineering,Tianshi College,Tianjin 301700,China)
Abstract:As a micro-wheeled robot,micromouse can solve maze independently. In this paper,the body structure of the micromouse is studied. By adding a new double-layer sucker device to increase the pressure,the speed of the micromouse in the maze shuttle is improved,and the risk of the micromouse slipping at high speed is reduced;through the research and improvement of algorithm control,the micromouse can find the best path from the beginning to the end in the maze. Under the trend of todays intelligent society,the micromouse has a wide range of practical value,and its technology can be extended to industries such as automatic navigation and obstacle avoidance robots.
Keywords:wheeled robot;micromouse;structure design;algorithmic control
0 引 言
电脑鼠是一个基于微处理器控制的、集传感器与控制于一体的、能够自动穿梭迷宫的智能微型机器人[1]。迷宫由16 cm×16 cm、18 cm×18 cm的正方形单元格组成,迷宫的隔墙板沿方块的四周布设,形成迷宫通道,起点设在迷宫的四个边角,终点设在迷宫正中心,由四个正方形单元和一根固定柱子构成。电脑鼠微处理器刷入迷宫搜索算法后,可对迷宫进行探测及记录迷宫信息,规划出一条最佳路径,最后从起点以最快速度冲刺到终点。
现阶段,在国内仅有少数科研院所能对电脑鼠进行自主研发和设计,成都理工大学设计的电脑鼠在大陆首次使用对角过弯[2];天津大学则首次在电脑鼠机身加入吸盘结构,用来提高电脑鼠运行的稳定性[3];在2018年11月第七届“启诚杯”电脑鼠走迷宫竞赛中,天津天狮学院龙行同学获得企业组赛题第一名,受邀参加在日本东京举行的第39届全日本电脑鼠国际公开赛,与国际电脑鼠顶级专家学习、交流[4,5]。
电脑鼠作为一种微型轮式机器人,涉及许多工程专业技术,影响其运行速度与稳定性的因素很多。在研究电脑鼠的过程中,其车体结构设计与搜索算法尤为重要,在运行中最有可能影响到电脑鼠的稳定性,因此改进电脑鼠车体结构,加入新型双层吸盘装置,增加电脑鼠吸地力,以保证其运行稳定;同时,优化搜索算法,使得电脑鼠能够适应吸盘结构,在电脑鼠运行时,可以根据需求任意切换法则,求解迷宫。
1 车体结构设计
电脑鼠在迷宫中穿梭并到达终点,车体结构是实现所有功能的载体,结构分析是电脑鼠设计的基础。
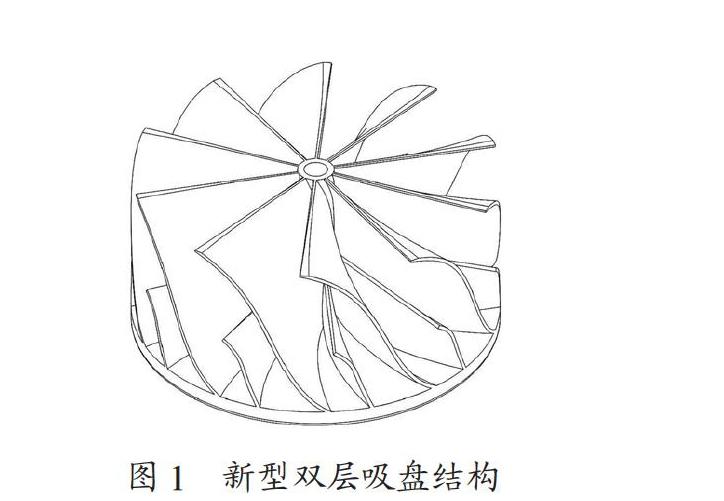
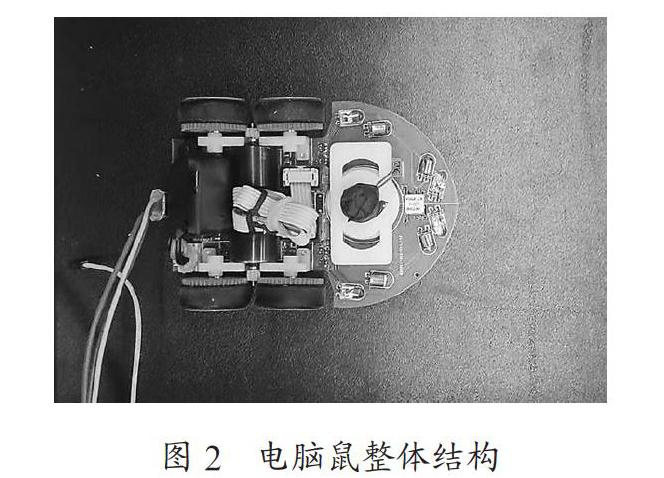
机械结构设计对于电脑鼠而言具有重要作用,若其设计得当,可大幅加速,同时良好的机械结构设计,也可以提高电脑鼠运行的稳定性[6];如果设计不合理,就会导致其运行稳定性差,就算拥有优良的运行算法也不能发挥其最佳的运行效果,国际上的电脑鼠爱好者都在积极设计以及寻找布局合理的机械结构,力争结构做到完善。本文针对传统电脑鼠高速运行转弯时产生的打滑现象、重心不稳的问题,优化板载,增加设计了双层吸盘装置,其结构如图1所示,双层吸盘装置包含涡轮长形扇叶与涡轮短形扇叶,空气从涡轮长形扇叶处被吸入吸盘装置,然后从涡轮短形扇叶排出,增加空气与其扇叶的受力面积,增大了压力,使得电脑鼠车轮与路面摩擦力变大,提高了电脑鼠机身稳定性。同时,为了保证电脑鼠运行速度,降低电脑鼠高速下打滑的风险,本文将电脑鼠整体结构设计为四轮两驱结构,其整体结构如图2所示。
2 电脑鼠算法控制
2.1 红外线检测
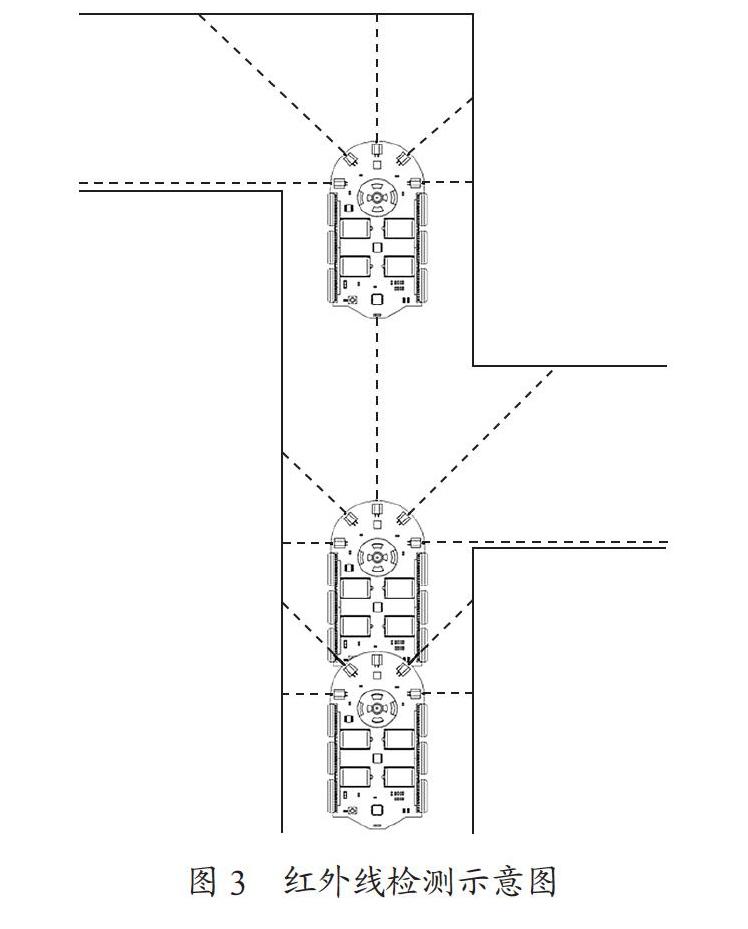
由图2可知,电脑鼠利用前端车头五个红外传感器来检测迷宫道路情况,然后判断是否存在路口。電脑鼠在迷宫中运动时,其红外检测示意如图3所示,电脑鼠左右红外传感器时刻检测路口存在情况;斜45度红外检测居中位置并进行实时校准;图3所示迷宫第一个路口前方存在新路口,电脑鼠在搜索算法中进行路线记忆,若此处右转,前方无路可达终点,电脑鼠返回最上方位置的路口;在第一个路口右转时,右侧红外传感器相应检测值变大,此时右侧红外不能进行转弯,电脑鼠还未进行右转,斜45度红外传感器检测值将由大变小,标记到达设定值时则会右转,在程序内进行转弯角度设置,斜45度红外传感器继续辅助转弯,返回检测值,等待回正。
2.2 车轮电机控制
车轮电机控制包括驱动时序、速度调节、转角调节,保证电脑鼠在迷宫中能前进、掉头、左转、右转、加速、减速。
在以上基本要求中,转弯控制是最重要的;在迷宫中有许多道路,无法转弯则会失去走迷宫的能力,所以在第一次启动搜索迷宫时,运用转弯函数实现电脑鼠的转弯功能,并实时绘制等高图。等高图是车体行走在地图中时,运用红外传感器感知到的迷宫地图上的路况信息,也就是将红外数据进行压栈,并将数据进行存储,以栈来记忆并标出从起点到终点相应迷宫格数以及拐弯信息的图像,许多封闭路径的脱离与冲刺的道路都可在制作出等高图后迎刃而解,使电脑鼠少走一些弯路。转弯函数不仅仅是程序控制电机转速实现的,还会运用红外以及陀螺仪检测,依据检测值实时对程序中的转弯常量进行减弱或者加强,从而减少转弯时可能出现的打滑、倾斜、早拐等现象,有利于绘制等高图。
在迷宫搜索后,电脑鼠返回起点,此时等高图已经绘制完成,最优路径已经产生,并且记录着迷宫的路况信息,此时红外传感器以及陀螺仪起到定位核实等高图的作用,需将实现红外感知功能以及陀螺仪感知功能封装在冲刺函数中,运用对等高图的读取来控制电机在直道时加速行驶,在弯道时通过红外传感器以及陀螺仪的检测实现高速转弯,以最快的速度冲向终点。其中冲刺函数的速度可在程序宏定义中调节,防止在极限因素下无法正常行驶造成机体损坏。
2.3 电脑鼠搜索算法
电脑鼠涉及的算法分两种,即迷宫搜索算法和迷宫最短路径算法。在未知的迷宫中,從起点迷宫格搜索到终点格,然后以相同路径返回;搜索算法要求在最短的时间内搜索到尽可能多的迷宫格,以避免搜索重复、搜索混乱、搜索错误等。迷宫最短路径算法是根据电脑鼠从起点搜索后,从获得的迷宫信息中计算出一条从起点到终点的最短路径,最短路径要求弯道尽量少,所花时间为最短。
迷宫搜索算法较多,常采用右手法则、左手法则、中左法则、中右法则、中心法则[8]。实际应用时,可选择其中任意法则。电脑鼠的相对方向决定了其下一步使用的搜索算法,法则切换流程图如图4所示,右手法则即使检测第一个右转路口,若无右转路口进入最后一个左转路口;中右法则即使过中心线后的第一个右转路口;左手和中左法则与上述两个法则类似。当无路可走时,折回搜索行走过的路线不在法则中,防止重复记录路线生成错误。
以中心法则为例,将迷宫分为四块,中心法则搜索图如图5所示,箭头为地图中心位置即每块的边界;首先,左下角为起点,位于迷宫左下块,此时切换为中右法则且车头位置向上,控制电脑鼠正常走入左上块,穿越迷宫中心线后到达迷宫左上块,切换为右手法则,地图显示为到达“2”下方右转,右转后车头向右,此时算法为中右法则,控制电脑鼠穿越迷宫中心线,当过中心线时,电脑鼠即达到右上块,车头朝右,此时,将法则转换为右手法则,进入第一个死胡同,无法继续前进,进行掉头,掉头后车头朝向应为向上,转换为左手法则,如上所述,经过多种法则转化后,电脑鼠达到迷宫中心,完成迷宫穿梭求解。
在使用中心法则时,电脑鼠利用前端车头红外传感器获取到十六进制数值,结合等高图Y轴坐标判断出电脑鼠在迷宫的方位,迷宫起始方向为X轴,而下列代码中GmcMouse.cY是通过等高图绘制出的结构体数据与红外传感器当前读取的数据求“或”操作,得到电脑鼠的位置,之后通过车头方向GucMouseDir选择相应的算法法则,并跳转至程序相应位置,其中leftMethod()为左手法则,rightMethod()为右手法则,frontRightMethod()为中右法则,frontLeftMethod()为中左法则,具体代码实现为:
if (GmcMouse.cY & 0x08) {
/* 此时电脑鼠在迷宫的右上角 */
switch (GucMouseDir) {
case UP: /* 当前电脑鼠向上 */
leftMethod(); break;
case RIGHT: /* 当前电脑鼠向右 */
rightMethod(); break;
case DOWN: /* 当前电脑鼠向下 */
frontRightMethod(); break;
case LEFT: /* 当前电脑鼠向左 */
frontLeftMethod(); break;
default: break;
}
}
else {
/* 此时电脑鼠在迷宫的右下角 */
switch (GucMouseDir) {
case UP: /* 当前电脑鼠向上 */
frontLeftMethod(); break;
case RIGHT: /* 当前电脑鼠向右 */
leftMethod(); break;
case DOWN: /* 当前电脑鼠向下 */
rightMethod(); break;
case LEFT: /* 当前电脑鼠向左 */
frontRightMethod(); break;
default: break;
}
}
3 結 论
人工智能电脑鼠的结构设计与算法控制研究在机器人领域中是一个十分重要的分支。本文设计了一种四轮两驱电脑鼠,加入双层吸盘装置,使得电脑鼠通过吸盘抽取底部的空气,利用大气压强提高吸附强度,提高了电脑鼠运行的稳定性,这种研究可以广泛运用到各种吸附机器人中;同时,对车轮电机控制以及电脑鼠搜索算法进行了研究,使得电脑鼠能够在迷宫中加速与转弯,随时切换搜索法则,自主求解迷宫。在5G时代来临之际,无人驾驶汽车、自动派送无人机等自动化智能设备兴起,人工会智能终会成为21世纪发展的方向。
参考文献:
[1] 龙威林.教学型智能移动机器人控制系统设计研究 [D].天津:天津大学,2014.
[2] 刘晓云.机器人研究对自动化事业的重要性 [J].科学技术创新,2018(31):159-160.
[3] 宫兆俭.新型电脑鼠的设计开发 [D].青岛:中国海洋大学,2013.
[4] 启程科技.中国代表团远赴日本参加第39届全日本电脑鼠国际公开赛 [EB/OL].(2018-12-12).http://m.qcmcu.com/index.php?a=show&catid=16&typeid=13&id=91.
[5] 启诚科技传媒.中国代表团远赴日本参加第39届全日本电脑鼠国际公开赛 [EB/OL].(2018-12-14).https://dy.163.com/article/E30FNGBH0518T9LL.html.
[6] 王磊.基于IEEE电脑鼠走迷宫竞赛的迷宫算法分析与实现 [D].济南:山东大学,2013.
[7] 江峰.新型电脑鼠软、硬件系统的优化 [D].南京:东南大学,2015.
[8] 吴建明.电脑鼠走迷宫算法模拟器的仿真建模与实现 [J].电脑开发与应用,2014,27(7):33-35.
作者简介:龙行(1998—),男,苗族,贵州凯里人,本科在读,研究方向:嵌入式系统开发。
猜你喜欢
交通科技与管理(2022年9期)2022-05-24
交通科技与管理(2022年8期)2022-05-07
理科爱好者(教育教学版)(2022年2期)2022-05-05
科学与财富(2021年36期)2021-05-10
智富时代(2019年2期)2019-04-18
智富时代(2019年2期)2019-04-18
居业(2018年4期)2018-10-24
神州·上旬刊(2017年9期)2017-10-15
科学与财富(2017年20期)2017-07-10
建筑建材装饰(2016年6期)2016-10-14
