
语音交互导览机器人的设计∗
2021-06-29 08:42程启超周家武
计算机与数字工程 2021年6期
程启超 周家武
(兰州理工大学电气工程与信息工程学院 兰州 735050)
1 引言
机器人研发、制造是衡量一个国家科技创新能力和高端制造业水平的重要标志,人类社会终会朝着智能化方向发展,因此,世界各国对机器人产业的发展保持高度关注,许多国家将机器人的发展计划提升到国家战略高度,机器人产业发展将影响全球制造业战略格局[1]。
在许多场景下服务机器人已经得到广泛应用,如扫地机器人等,随着生活节奏的变快、老龄化现象的凸显及生活水平的日益提高,对导览机器人[2]等降低人类劳动强度的商用服务机器人的需求越来越迫切,导览机器人的应用可为企业和社会带来很大的经济效益[3]。
目前,导览机器人主要研究问题包括定位导航、语音交互及场馆设备联动等。在定位导航方面,于春和采用激光雷达进行地图重构,效果较好,但在存在较强干扰的复杂环境下,地图的重构效果较差[4],还有部分研究人员采用视频导航等,这些导航技术在复杂环境下容易受到干扰,因此本文采用磁导航和RFID射频识别技术,抗干扰性强,提高导航定位的稳定性。对于现有机器人语音交互不够智能的问题,集成开发了先进的AIUI语音交互解决方案,具备识别率高,支持自定义唤醒词和对话内容等先进特性,另外还就现有机器人无法与场馆设备联动等方面进行了一些改进,设计了包含多种通信方式的无线控制单元,根据场景选择合适的通信方式与场馆设备通信,具有较高的兼容性和可靠性。
2 系统结构
本设计的语音交互导览机器人(以下简称机器人)是以服务机器人为背景,在公共场馆为游客提供导引和讲解服务的一种商用机器人,旨在提高公共服务场馆的讲解服务效率和趣味性,提升游客的参观体验。机器人具有如图1所示的火箭和宇航员形态。
图1 语音交互导览机器人渲染图
系统框图如图2所示,由主控制器、液晶触摸显示屏、导航定位单元、AIUI评估板、语音输出单元、无线控制单元、驱动单元、超声波传感器、红外热释电传感器、OLED显示屏等组成(图中未画出电源部分),其中主控制器位于底盘主板上,导航定位单元包括磁导航传感器和RFID传感器,语音输出单元包括音频放大器和立体声扬声器,无线控制单元包括射频、红外、Wi-Fi、蓝牙通信模块。
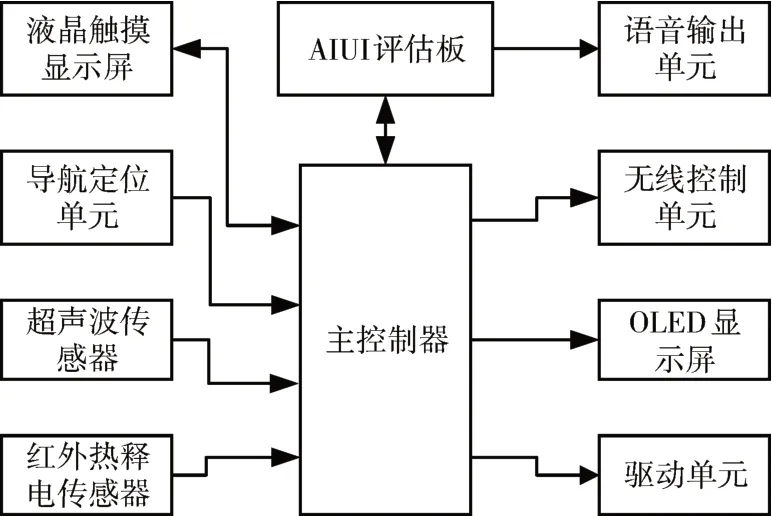
图2 系统框图
3 系统硬件设计
3.1 控制器
控制器选用STM32F4系列低功耗高性能控制器,该系列面向需要高集成度、高性能、嵌入式存储器和外设的医疗、工业与消费类应用,提供包含6个串口在内的15个通信接口,丰富的片上资源与外设接口大大简化了硬件电路,降低了系统设计成本。机身配备了3片STM32F4控制器,分别位于机身头部、中部和底盘的控制板,头部控制器主要控制头部运动及语音指令处理,中部控制器主要控制变形机构的运动,底盘控制器用于各传感器及单元数据融合处理,以及驱动轮的运动控制[5]。
3.2 AIUI评估板的开发
AIUI评估板具备强大的语音交互能力,支持自定义唤醒词及多种自然语调的发音人,可在开发网站生成自定义唤醒词文件,通过板载USB接口,用ADB命令传输唤醒词文件至评估板,重启即可启用自定义唤醒词,同时AIUI评估板的六麦克风阵列具备360°声源定位能力,定位精度达到5°,使机器人具备声音方位感知能力[6~7],其强大的云端库和超高的识别率使机器人具备能听会说及控制场馆设备的能力。AIUI评估板实物图如图3所示。

图3 AIUI评估板实物图
在云端识别出语义之后,AIUI评估板的串口会输出包含声源角度和对话内容在内的Json格式数据,通过解析Json格式的数据即可知道游客的意图,AIUI云端开发平台支持自定义对话内容[8],通过其强大的自定义功能,可在机器人控制、信息问询等多种场景下提供个性化交互。
3.3 导航定位单元的设计
导航定位单元由安装在底盘的磁导航传感器和RFID传感器组成,通过识别磁条来导航,通过RFID传感器读取RFID标签来获取位置信息。磁导航传感器具有8个均匀分布检测点,点间距10mm,开关量输出,磁导航传感器与磁条的相对位置不同,使检测到磁条的检测点发生变化,通过对检测点的判断可知机器人偏离磁条的程度,调节驱动轮间的差速使机器人沿着磁条行进。RFID传感器采用感应距离0cm~15cm的低功耗RFID站点传感器,通过识别埋设在磁条下的RFID标签,机器人可获取自身位置信息。
3.4 无线控制单元的设计
采用射频、红外、蓝牙、Wi-Fi等通信方式与场馆演示设备、多媒体设备、灯光、空调系统进行通信,到达讲解点时,通过导航定位单元获取到的讲解点RFID标签信息含有对各受控设备的具体操作信息,根据此信息生成指令信息,指令信息包含受控设备的地址码和指令,根据设备码区分对应设备,受控设备将读取指令信息并解析,执行相应的动作,如演示设备开始演示等,根据场景的要求选择最适合的通信方式,可适应复杂的场馆环境,具备良好的控制效果[9]。
3.5 驱动单元的设计
驱动单元包含驱动轮、头部和变形机构的电机及其驱动器。底盘设计有两个驱动轮和四个万向轮,驱动轮电机采用直流无刷减速电机,配合驱动器以PWM控制驱动轮电机使机器人自主行进[10]。变形机构控制手臂的展开收回、上升下降,采用一个直流减速电机控制手臂的展开及收回,另一个电机控制手臂的上升和下降,在手臂收缩和上升至末端时,机器人变成火箭形态,反之变成宇航员形态,在变形机构上设计有光电开关和限位块,在手臂结构件运动到位时向控制器反馈状态信息,手臂拥有两个自由度,可上下前后运动,前后摆动角度达45°,头部配备两个直流减速电机,分别控制头部的水平和俯仰转动,配合角度传感器、限位块可精准控制角度,防止超出可转动范围,头部拥有两个自由度,可左右转动45°,向上转动15°,向下转动5°。
3.6 其他部分的硬件设计
采用24V锂电池作为电源,配合电压转换系统为整个系统供电。头部面罩内装配了两块2.42英寸OLED显示屏,可显示精细的表情,机身中间配备一块8英寸触摸液晶显示屏,配备一个RS232通信接口,通过RS232转TTL转换器,可与位于底盘的主控制器通信,通过显示屏通信协议控制屏幕的显示,可用VisualTFT软件开发交互界面,开发难度适中,并可用Lua脚本[11]编程,具备一定的灵活性,支持播放内部或外部存储的音视频资料;机器人具有安全冗余设计,在各活动部位设计有光电开关和限位块,背部配备有紧急停止按钮,最大限度保证人员安全[12],配备感应角度达到120°的超声波传感器可在检测到障碍物时,依据检测距离执行减速或者紧急停止,并且发出语音提示,提醒工作人员进行处理,配备的红外热释电传感器在检测到游客时[13],可主动向游客问好。机器人实物图如图4所示。

图4 语音交互导览机器人实物图
4 系统软件设计
机器人底层代码采用C语言编写,采用模块化的编程方式,即按照系统的不同功能模块编写相应的代码,使程序简单易于维护[14]。系统上电时,先进行自检,检测各控制器之间的通信是否正常并显示默认表情,触摸显示屏显示主界面,检测变形机构状态并进行头部位置校准,如果检测到异常,则在机身显示错误信息,如果检测通过,则进入待机状态,待机状态可使用语音交互,主动问好等功能,在待机状态如接收到屏幕或者语音的开始导览指令,则脱离待机状态进入导览状态,机器人开始沿着预设的磁条行进,模拟人的摆臂动作,显示相应表情,在导览过程中随时可接受停止导览指令,此时系统会退出导览状态,进入待机状态,当RFID传感器识别到讲解点时,进入讲解状态,讲解过程的程序流程图如图5所示。

图5 讲解过程的程序流程图
依据读取的讲解点信息讲解对应内容,在讲解开始时,机器人执行的组合动作是依据讲解内容编制的手臂动作,以配合讲解内容,开始讲解后,AIUI交互将被停用,防止讲解被打断,在提示开始交互的语音播报后将启用AIUI交互,声源定位功能将启用,头部实时跟随当前声音方位,直到交互完成,未在10s内识别到有效交互或交互时间超过2min视为交互完成,此时将会播报交互完成提示语音,提醒游客跟随机器人前往下一讲解点,直到最后一个内容讲解完成,将提示游客本次讲解已完成,并进入待机状态。
系统采用标准ModBus-RTU通信协议[15]进行各控制器间通信,本文采用的数据帧格式如图6所示,通信波特率为9600bps,8位数据位,1位停止位,无奇偶校验位。
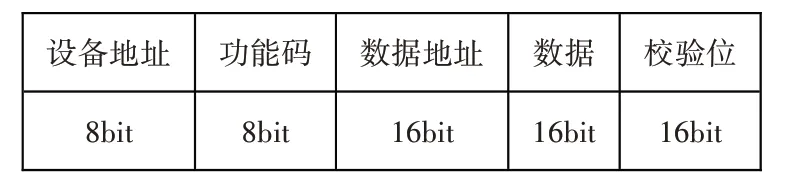
图6 数据帧格式
1)设备地址用来区分各单元模块,在本系统中头部地址为0×01,变形机构地址为0×02,眼睛地址为0×03,音视频地址为0×04;
2)本系统采用0×06作为写入功能码,0×03作为读取功能码,采用保持寄存器进行操作;
3)数据地址根据系统需要从0×0000开始每个功能依次递增;
4)数据位为具体执行的操作代码,根据需要从0×0000开始递增;
5)采用CRC循环冗余校验对帧数据进行校验。
在发送指令之前,位于底盘的主控制器都要查询该单元模块的状态,单元模块将返回状态信息,只有当该模块处于空闲状态时,才会发送指令。
5 结语
一般的导览机器人只侧重于讲解方面的研究与设计,对于人机交互和与场馆设备互联的重视不足,本设计综合考虑了以上内容,可以提供生动直观的讲解服务,并整合了先进的AIUI语音交互方案,提升了游客的交互体验,特意设计的变形结构,使机器人的科技感得到显著提升,在讲解过程中通过与场馆演示设备、多媒体设备、灯光设备、空调系统等联动,显著提升场馆信息化和智能化水平。系统采用模块化设计和标准通信协议,具备可靠性高,易于维护等特性。机器人在实验室搭建环境下运行平稳,证明了其可行性。本设计的机器人虽然在智能化和人性化方面相比传统机器人得到很大提高,但是在机器人动作完成精度与噪声控制方面仍有很大提升空间。
猜你喜欢
科技创新与品牌(2022年4期)2022-05-08
浙江人大(2022年4期)2022-04-28
汽车零部件(2021年9期)2021-09-29
金桥(2021年3期)2021-05-21
发明与创新·大科技(2017年9期)2017-09-14
丝绸之路(2016年19期)2016-11-17
儿童故事画报·发现号趣味百科(2015年4期)2015-12-04
早期教育(美术教育)(2010年7期)2010-06-28
为了孩子(孕0~3岁)(2001年3期)2001-06-13
