
果园作业机升降平台电气系统设计
2021-07-01 22:59王倩
装备维修技术 2021年51期


摘 要:我国是水果生产和消费大国,但由于各种条件限制,目前果园作业机械化程度不高,不能满足现代化需要。本文基于果园作业机升降平台实际情况中稳定性和安全性的问题进行系统设计,在现有剪叉式果园作业机升降平台的基础上,优化调平单元,通过增加水平传感器和压力传感器的方式设计出智能角度调平装置,使升降平台在复杂道路上保持水平,提高了果园作业机的稳定性和可靠性。通过试验可知,果园作业机具有较好的可靠性和稳定性,在一定程度上能够降低人工承办,增加作业效率。
关键词:果园作业机;升降平台;调平装置
一、果园作业机现状分析
我国是世界最大的水果消费国,2021年水果需求量为29912万吨,同比增长3.3%。同时我国也是水果产量和种植面积第一的国家,在2021年水果产量为29611万吨,同比增长3.2%;果园种植面积约为12962千公顷,同比增长2.5%。但是由于我国生产和研发的重点集中在小麦、水稻等粮食作物,对果园作业机的关注较少。同时由于我国果园种植区地理条件复杂、种植方法多样、农艺与农机脱节等原因,导致我国目前果园作业的机械化水平不高,机械化率不足30%。因此,我国果园作业机不能满足现代果业的发展需要,具体表现为:1)果园布局的不合理导致果园作业机无法发挥作用;2)果园作业装备质量参差不齐导致作业机利用效率很低;3)果园作业机适用性较低使得果园缺乏合适的作业裝备。
近年来,随着果业机械化的快速发展,国内外果园机械化作业、规模化种植程度得到大规模的推广和应用。
(1)果园作业机国内发展现状
相较于欧美等发达国家,我国对果园作业平台研究起步较晚,进展也比较缓慢。70年代我国开始研究果园作业机,先后研制出了机械振动式山楂采果机、气囊式采果器和手持电动采果器等。90年代后,在市场经济的推动下简易采摘器如动剪枝机、辅助升降平台等半自动采摘工具相继出现。
2000年我国的电动升降平台技术取得了重大突破,国产电动升降平台研制成功,该技术广泛应用在果园作业管理中,给果园作业带来极大的便利。2007年,新疆机械研究所研制出了我国第1台多功能履带式果园升降作业平台,该升降作业机性能好、爬坡能力强、操纵方便,可实现采摘、喷药、剪枝和运输等功能,为我国果园作业机的发展做出的巨大贡献。2011年,山东华兴机械股份有限公司成功研制出SQT-3000型多功能升降平台,该平台可以完成多种果园管理作业。2013年,王建超设计了悬挂式丘陵山地果园作业升降平台。2014年,王小龙等人,对果园升降平台的调平装置进行了改进。2015年,刘大为等人设计出了小型果园升降作业平台,并进行了试验。2018年刘奎等人,对三轮自走式升降平台作业的安全性进行了分析。
(2)果园作业机国外发展现状
国外果园作业机研究起步较早,20世纪初,欧美等发达国家已经开始进行高空升降作业车的相关研究,目前已经形成较成熟的系列产品。美国在20世纪40年代,已经基本实现果树生产机械化,并在60年代成功研制出了液压升降平台车,大大提升了果树修剪效率和果树收获效率。70年代,除果品采收和部分细致修剪仍使用人工作业外,果园其他主要作业项目,都实现了机械化。
英国、日本和澳大利亚在果园作业机领域取得了巨大进展。英国公司Genie研制出了GR12、GR15和GR20型等一系列产品;日本为了适应本国丘陵地形多的特点,研制出了小型化果园作业平台BP40型;澳大利亚CRENDON公司生产出了适合于大规模种植面积的SQUIRREL型升降平台作业车,这种作业机适用于芒果和鳄梨采摘。
二、果园作业机升降平台
(1)功能介绍
果园作业机主要包括建园、栽植、耕作、施肥、灌溉、修剪和采摘等作业装备。其中果树采摘分为振动采摘、作业机升降平台采摘和人工智能机器人采摘。
目前,果园作业机升降平台是果实采摘和果树修剪装备中研发种类较多且应用最为广泛的机械设备,主要包括:升降装置、载人平台、控制面板,以及行走和动力装置,其中升降装置包括液压单元、油管、液压缸、剪刀叉等。果园作业机升降平台除了具有采摘、修剪等基本作业功能,还可喷药、除草、开沟和施肥等。
平台升降主要分为内燃机驱动、液压驱动和电驱动三种,用于实现果农对不同高度果树的作业管理。按升降机结构的不同,果园作业机可分为:剪叉式、伸缩式、直臂式、折臂式和阶梯式等。在果园作业升降平台中,由于剪叉式升降机构具有安全性能好、稳定性高、承载能力强的优势,曲臂式升降机结构具有紧凑、转向灵活等优点,这两款升降机构应用最广泛。
1)剪叉式升降机构
剪叉式升降机构的作业平台可以增加平台扩展功能,使多人同时作业,提高工作效率。根据果园作业平台举升高度的不同,剪叉结构可以设置为一级剪叉结构或者多级剪叉结构,但是随着级数的增加作业平台举升的稳定性会降低。
2)曲臂式升降机构
曲臂式升降机构,适用于单人作业,可用于狭窄的通道和拥挤的工作环境中,例如树冠较大的果树品种作业。曲臂式升降机构多采用一体化的液压电器集成系统,配备两路以上液压油缸。曲臂式机构举升高度一般>5 m,在稳定性的控制方面要求较高。
(2)电气系统设计
通过上述升降机构的介绍可知,升降作业机对升降平台稳定性的控制要求较高,这也是目前研发热点。调平装置工作的过程中会影响果园作业机的质心位置,从而影响升降平台的稳定性,因此优化调平装置的稳定性可有效增强果园作业升降平台的可靠性。
为了改善升降机构在果园作业时的稳定性,增强果园作业升降平台的可靠性,本方案在现有剪叉式果园作业机升降平台的基础上,对其升降装置进行了改进,通过增加水平传感器和压力传感器提出了一种智能角度调平装置,使升降平台在复杂的崎岖道路上保持水平,从而提高果园作业机的稳定性和可靠性。
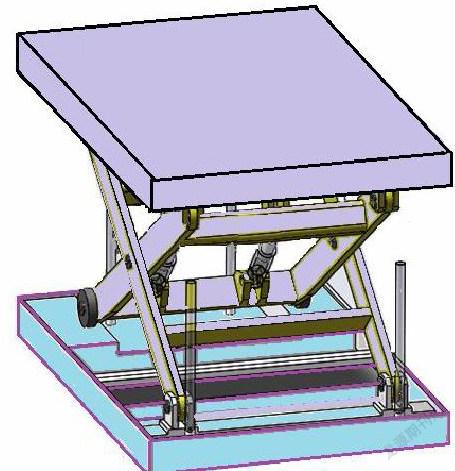
升降装置由平台、滚轮、液压单元、控制单元、调平单元及剪叉结构等部分组成。液压由叶片泵形成一定的压力,经过滤油器、电磁换向阀、节流阀、液控单向阀和平衡阀等使液缸活塞上下运动,以达到提升重物的效果。其中调平单元主要包含调平机构、执行部件、控制部件以及相应的传感器,调平单元通过控制工作部件的角度,确保工作面处于相对水平状态。
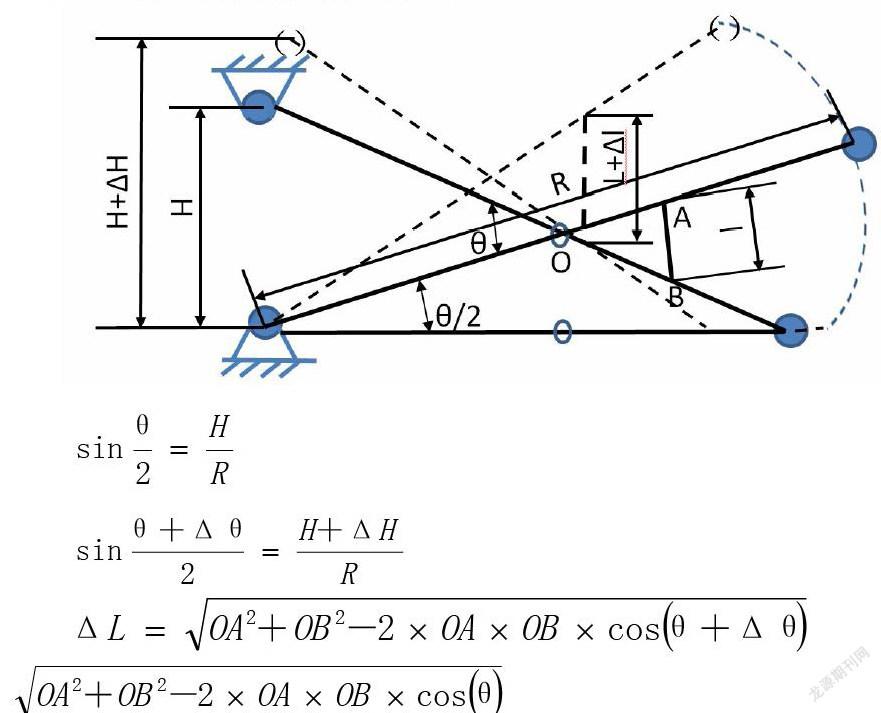
下图是升降装置的剪叉结构,其中H和ΔH分别是剪叉的原始高度和升降高度,L和ΔL分别是液压装置单元的原始长度和伸缩量长度,θ和R是剪叉的初始夾角和臂长。
根据原始高度H、升降高度ΔH来确定出液压单元伸缩量ΔL,液压单元通过推动液压杆伸缩来改变剪刀叉的交叉角度,从而控制平台达到理想高度。剪叉结构的开合由两个不同液压单元进行分别控制,同时一个或多个水平传感器和压力传感器将采集的压力数据和水平角度相关数据传递给控制单元,控制单元进行分析后对升降平台的高度和角度进行调整和优化,以使果园作业机工作时更加安全、平稳、可靠。
(3)可靠性分析
可靠性试验主要包括平地性能实验和爬坡性能实验。一是升降作业机在平地行驶观察作业机平台上升下降时是否稳定,二是升降作业机通过35度角的斜坡,观察升降作业机上坡和下坡时平台是否稳定,三是升降作业机转弯、加速、升降平台等基本功能测试。
试验结果:
① 平地行驶测试
在平地行驶过程中,行驶速度高速档位和低速档位切换过程中升降平台无明显晃动,调整升降平台的高度后,升降平台无卡顿现象并且水平垂直方向上的无明显晃动。
② 爬坡测试
在坡度为35度角的斜坡进行上坡、下坡和驻车测试,试验结果显示果园作业机各方面性能均正常,无滑坡现象发生,整个过程中升降平台会自动调整角度,使平台一直保持水平状态。
③ 基本性能测试
果园作业机在不同的运行模式下,其转弯半径差异不明显半径均小于4m。加速过程中发动机无熄火、黑烟现象发生。升降平台空载或负载(1人-7人)时依然平稳升降,不卡顿。
由试验可知,果园作业机在平地或有坡度的路面行驶时升降平台均具有较好的可靠性和稳定性,无卡顿、熄火、等现象发生。
三、结束语
综上所述,一方面,虽然发达国家对果园作业平台研发早、技术成熟度高,但价格昂贵且不适用于我国果园作业环境。另一方面,我国果园作业平台的研究起步较晚,虽有相应产品,但相对于国外先进机械,还存在着噪声大、人机结合性较差、功能单一和缺少电子监控设备等问题,且稳定性和安全性还有待进一步提高,无法满足用户的操作需求。因此,改善果园作业机,优化作业机升降平台对提升我国果园作业工作效率、降低劳动强度、节省人工成本、提高生产效率有重要意义。而本方案通过优化升降机构的调平单元,设置水平传感器和压力传感器,有效的对升降平台的高度和角度进行调整和优化,改善了果园作业机的稳定性和可靠性。
参考文献:
[1]常有宏,吕晓兰,蔺经,薛新宇,王中华.我国果园机械化现状与发展思路中国农机化报,2013(06):21-26
[2]程健.果园多功能轮式作业平台设计与优化[硕士学位论文]杨凌:西北农林科技大学.2016
[3]杜干.升降平台升降机构研究现状分析机械工程与自动化(S2):202-207,2013
课题来源:2021年邢台市市级科技计划自筹经费项目《环保型智能化山地果园作业机的研制》,课题编号:2021ZC198
作者简介:王倩,出生年月:1977-12-10,女,汉族,籍贯:陕西省临潼区,所在单位:河北科技工程职业技术大学,职称:副教授,学历:大学本科,学位:工学硕士,研究方向:机械制造与自动化
