电动调节阀浅析
2021-07-02 15:29刘洋
科学与财富 2021年8期
关键词:远程控制


摘 要:本文开篇将电动调节阀与气动调节阀进行比对,通过剖析两者区别,将电动调节阀的优越性和制约其广泛应用的因素一并列出。从而发现导致其局限性的大部分因素是操作环境、工艺条件不适宜和对维护人员的高技能要求。随后将自身工作中遇到的情况进行归类、分析、总结,与此同时阐述了本人所维护的装置中电动执行器的多项隐含、附加功能的实际应用(主要介绍电路接线方法及控制原理),旨在将人为可干预的制约性降到最低。
关键词:电动调节阀 ; 阀门报警 ; 控制报警 ; 执行器报警 ; 联锁控制 ; 远程控制
1.引言
与传统的气动调节阀相比,电动调节阀具有以下明显的优点:节能(只在工作时才消耗电能),环保(无碳排放),安装方便快捷(无需复杂的气动管路和气泵工作站),与此同时也有不可忽视的使用局限性和弊端,下文将两者进行比对、剖析,将其优越性和制约其广泛应用的因素一并列出。
2.电动调节阀与气动调节阀相比较的优势及缺陷
除高可靠、全功能、超轻型的特点外,电动调节阀还有如下好处:对液体介质和大管径气体效果好。无需特殊的气源和空气净化等装置,不受气候影响,不受空压气的压力影响。即使电源失电时,也能保持原执行位置。 可遠距离传输信号,电缆敷设比气管和液体管道敷设方便得多,且便于线路检查。与计算机连接方便简洁,更适应采用电子信息新技术。电动调节阀不需建立特殊的气源和空气净化等装置,更不需配备电气阀门定位器,后期使用、维护成本电动调节阀要远低于气动调节阀。上述原因使得电动调节阀的配置成本、维护费用更低。气动调节阀用“气动阀+电气阀门定位器+气源”的复杂方式,降低了命令执行的可靠性(可靠性差的因素随环节的增多而增加),减少了维修工作量(维修工作量随电动执行器硬件环节减少而减少)。除上述优点外电动调节阀还具有调节过程可控性好,行程准确、可调,便于与阀门连接等优点。
电动调节阀的缺点和制约因素如下:电机必须经过多级减速才能输出力矩,使得运行较慢,从调节器输出一个信号,到调节阀响应而运动到那个相应的位置,需要较长的时间;其工作过程中和线路板或电机出现故障时可能产生静电火花或电火花,更适用于防爆要求不高的场所。因此在某些要求快速关启的关路上和油管、易燃易爆气体、化工危险品管路上还是使用气动阀。由于运动部件多,电机运行产生的内热会导致电机过热跳断,使调节阀停止工作,需待内部温度下降后方可正常运行(此种情况在电机长时间运行或频繁启动时更易发生)。电机频繁启动也是减速齿轮损坏、模块可控硅烧毁等故障的主要诱因。因其复杂性,对现场维护人员的技术水平要求相对较高。
下文主要对本人日常工作中遇到的电动调节阀相关故障、问题进行归纳和总结,旨在将人为可干预的制约性(缺陷造成的影响)降到最低。
3.在对电动调节阀实际维护、保养过程中,本人遇到的故障状况大致分为: 阀门报警、控制报警。
3.1常见的阀门报警分为TORQUE TRIP CL、TORQUE TRIP OP或MOTOR STALLED两种
3.1.1 TORQUE TRIP CL或TORQUE TRIP OP
解决方案:关阀方向运行时力矩跳断,在阀门处于关闭状态时,用手轮将阀门适度开启一点,“感觉”一下阀门的硬度,如果阀门没有卡死,重新设置阀门零点。将此时阀门所处位置设置为零点。重置零点后如发现阀门有漏量,则需适当逐步增大关力矩值关阀,再次设置零点,直到阀门关闭状态无漏量时,以最后设置的零点为最终零点,继续投用。开阀方向运行时力矩跳断,在阀门处于开启状态时,用手轮将阀门适度关闭一点,“感觉”一下阀门的硬度,如果阀门没有卡死,则需适当逐步增大开力矩,直至阀门可以正常执行开启动作。如果判断阀门已卡死,则需联系相关人员进行拆阀作业清除异物。
3.1.2 MOTOR STALLED
解决方案:应先用手轮操作,“感觉”一下阀门的硬度,检查是否阀门很紧。阀门在控制过程中受所处环境影响(如装置运行过程中温度变化大,易导致阀体热胀冷缩),导致其开启或关闭所需的力矩值增大,超过之前设定的最大值,使阀门卡顿。此种情况下需用手轮操作帮助渡过卡顿点,如渡过卡顿点后仍有同样的故障显示,则需适当逐步增大力矩,直至阀门可以正常执行动作。
3.2控制报警分为ESD ACTIVE和INTERLOCK ACTIVE两种
3.2.1 ESD ACTIVE
解决方案:一个有效的紧急保护信号将超越任何现场或远程控制信号,紧急保护操作的电源公共端独立于开阀、关阀和停止的远程控制信号。解除ESD控制信号后即可消除此报警。
3.2.2 INTERLOCK ACTIVE
当电动执行器显示窗口显示的故障代码为INTERLOCK ACTIVE时,表明联锁功能组态开启,在启动联锁的方向禁止对电动执行器的一切操作。
4.实现电动执行器控制目的的接线方法及原理
4.1联锁控制电路(实际中的允许开阀、允许关阀)
接线方法如图1所示。实现原理:以实际中的允许开阀联锁控制电路为例(即由图3中4、5、31、37构成的电路),当控制程序走到这一步,由计算机发出信号,允许电动执行器执行开阀动作。图3中的开阀允许为常开触点,收到远程控制信号时触点闭合,电路连通。装置通过此种接线方式和计算机程序的共同控制实现控制,保证安全生产。允许关阀联锁控制实现原理同上。
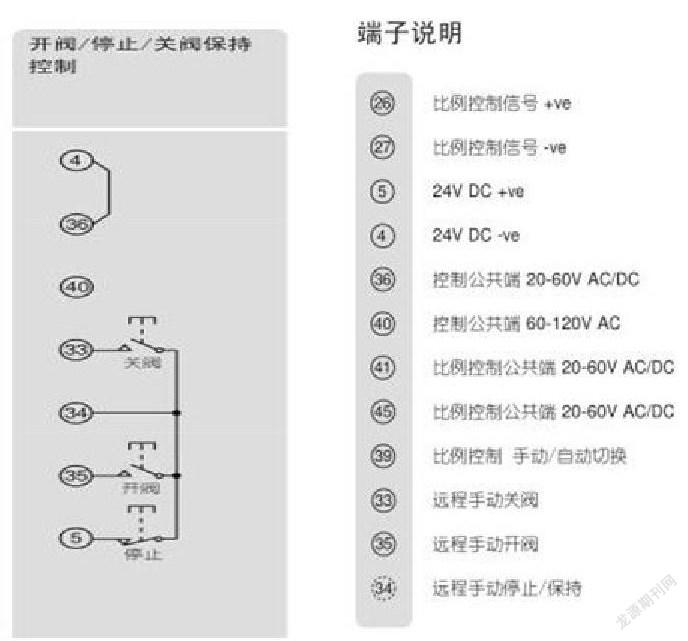
4.2 远程控制电路
在现场选择合适位置设置一个集中控制盘,将多个电动执行器的远程控制按钮集中在此控制盘上,从而实现集中控制操作,取代由操作人员逐一到每台电动执行器附近来进行操作。以远程关阀控制电路为例,当联锁解除后,手动按下集中控制板上的关阀按钮(远程关阀按钮处于常开状态),便可通过图2中4、5、33、34、36形成的通路,实现执行器的远程控制关阀功能。远程开阀控制功能实现原理同上。从图4可以看出,远程停止按钮为常闭触点且处于干路上,因此无论在执行器执行开阀或关阀动作时,只要按下远程停止按钮,执行器的动作都将停止。
结束语
本文在对电动执行器进行介绍的基础上,分析了其智能化发展的意义、现状、常见故障处理,希望能够对电动阀的日常维护、检修、研究发展提供一定的参考价值。
参考文献
[1]王东睿,郝秀平,曹式录. 电动阀门常见问题及产生原因[J].电力建设,2000(11)
[2]许常武,谭爱红.阀门电动装置的发展趋势[J].阀门,2002(03)
[3]刘进.阀门常见故障原因及处理方法[J].科技创新导报,2011(21)
[4]张国平.论我国机械电子系统的现状及发展趋势[J].中小企业管理与科技,2010(7)
作者简介
刘洋,女,1988年生,工程师,工学学士,中国石油天然气股份有限公司锦州石化分公司仪电车间,2011年参加工作,现从事系统维护工作。