基于粒子群算法的永磁同步电机自抗扰控制
2021-07-03 08:41刘晓悦陈瑞白尚维
华北理工大学学报(自然科学版) 2021年3期
刘晓悦,陈瑞,白尚维
(华北理工大学 电气工程学院,河北 唐山 063210)
永磁同步电机(Permanent magnet synchronous-motor, PMSM)由于具有性能优越、效率高且结构简单等优点,被广泛地应用在工业、交通、军事等领域[1]。但实际的工作中,永磁同步电机也存在着强耦合、参数易变、非线性和负载对象复杂多变等诸多问题[2]。这些因素影响着PMSM的控制性能。如今的永磁同步电机多采用的是经典的PID三环控制,此种控制方法较为简单,易于实现,但由于其线性的结构,导致PID控制适用性较差,且系统的抗干扰能力不足。
为了提高永磁同步电机控制系统的性能,研究者提出众多的控制方法。自抗扰技术不受被控对象内部机理和外来扰动的影响[3]。它由跟踪微分器、扩张观测器和非线性状态误差反馈三部分构成[4]。作为ADRC的关键组成,扩张观测器能将系统内部的扰动视为总扰动,然后对扰动进行实时的估计并补偿,由此提高了系统的抗扰动能力。同时,跟踪微分器和非线性状态误差反馈控制器的存在,保证了系统能快速无超调地跟踪输入信号。但是ADRC有着较多的控制参数需要调节,而且调节过程复杂繁琐,这是自抗扰控制技术一直存在的问题[5]。
该项目提出了一种改进的永磁同步电机自抗扰控制系统。首先,在矢量控制和PID控制的基础上,系统摒弃了传统的三环控制结构,取而代之的是结构简单的双环控制结构。同时设计了二阶自抗扰控制器,代替了矢量控制中的位置和速度环,建立了永磁同步电机位置伺服系统。然后,为了解决参数整定的问题,引入了粒子群算法,对扩张观测器的3个重要控制参数进行正定优化[6]。实验结果表明,此方法较好地提高了PMSM的控制性能。
1 PMSM数学模型
在d-q旋转坐标系下,假设永磁同步电机磁场在空间中呈正弦分布,忽略磁路饱和、磁滞和涡流损耗带来的影响[7],当采用矢量控制时,PMSM的数学模型为
电压方程:
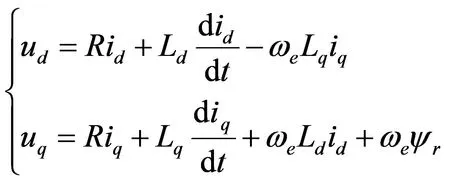
(1)
运动方程:
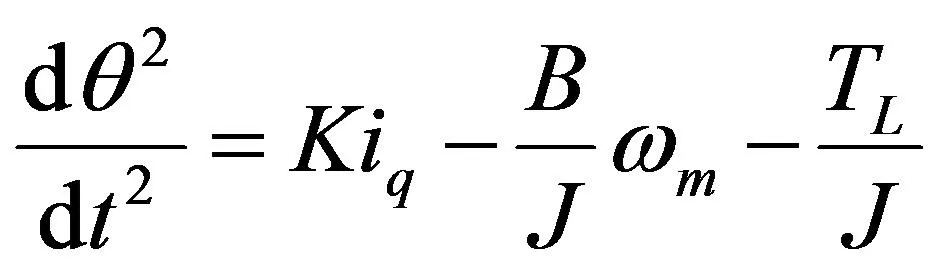
(2)
2 PMSM的ADRC位置控制器设计
自抗扰控制器由三部分组成,分别为跟踪微分器(TD)、扩张状态观测器(ESO)和非线性状态误差反馈(NLSEF)[8],二阶自抗扰控制器结构图如图1所示。
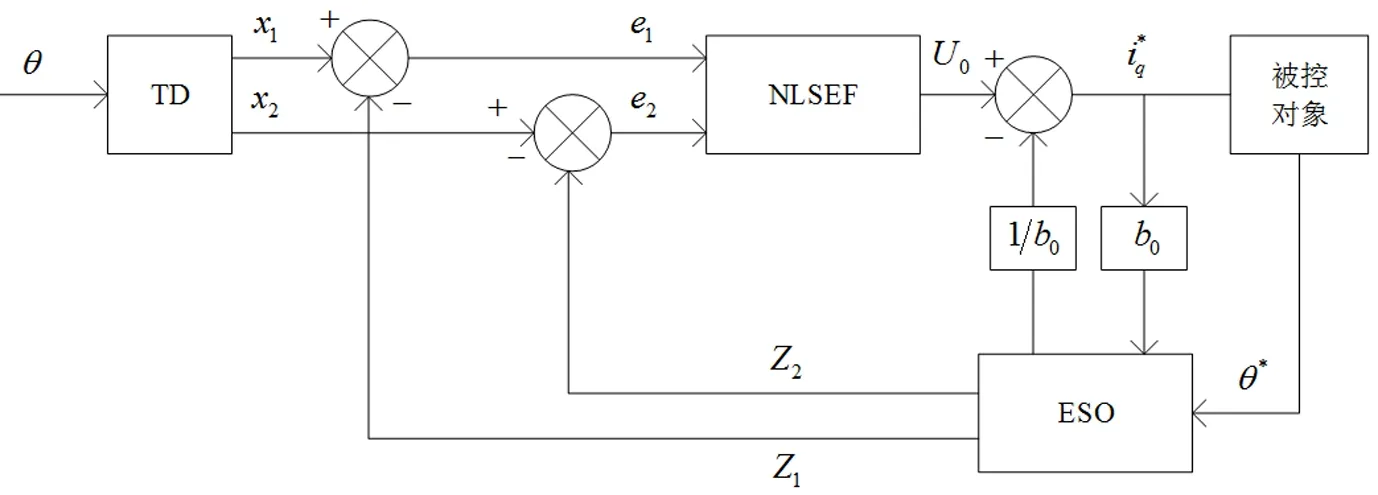
图1 二阶自抗扰控制器结构框图
跟踪微分器(TD)作为ADRC的重要组成部分,主要作用是提取连续信号和微分信号,并对信号进行跟踪,从而保证系统无超调现象[9]。而且跟踪微分器能抑制信号突变带来的扰动。
跟踪微分器的形式:
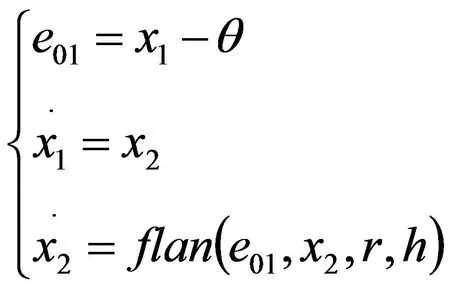
(3)
式中,θ是给定转子位置;x1是θ的跟踪信号;x2是θ的微分信号;γ为速度因子,确定跟踪速度;h为滤波因子,确定滤波数量;函数fhan如下:

(4)


扩张状态观测器方程为:
(5)

非线性误差反馈控制器:

(6)
其中α1,α2,α3,α4,α5为最优控制函数的非线性因子;δ1,δ2为滤波因子;β1,β2为可调参数。

基于矢量控制的PMSM二阶自抗扰位置控制器系统结构框图如图2所示。控制系统的整体控制结构采用的是ADRC位置控制外环与PID控制的电流内环相结合控制方法。此控制结构简单,能够保证电流环的快速响应[11]。

图2 ADRC位置控制系统器结构框图
3基于粒子群算法的ADRC参数优化
粒子群算法(Particle Swarm Optimization,POS)的理论依据就是参考了鸟群在不确定空间内搜寻食物的过程[12-14]。它是一种智能的优化算法,很多参数寻优事例都用到了此种算法。该项研究将对扩张状态观测器(ESO)的控制参数β01、β02、β03进行优化。将ESO的3个控制参数定义为PSO的一个粒子。每个粒子和粒子群如下:

(7)

(8)
式中,M为粒子群总数。粒子在运行中,会依照最佳位置Pbest和全局极值gbest不断地变化调整,然后得出最优解。速度与位置更新公式如下:

(9)

(10)
式中,vi(t)为粒子当前的速度;vi(t+1)为更新的粒子速度;xi(t)为当前粒子位置;xi(t+1)为最新粒子位置;ω为惯性权重,用来权衡局部最优和全局最优;γ1,γ2为0到1的随机数字;c1为局部学习因子;c2为全局学习因子。
粒子群中每个粒子的适应度值是由适应度函数确定的[15]。所以为了避免超调,寻找控制器与粒子最优位置之间的联系,把适应度函数定义为:

(11)
式中,e1、e2为瞬时误差;ω1、ω2、ω3为权重,ω3≫ω1通常情况下,ω1=0.999,ω2=0.001,ω3=100。
自抗扰控制器有着众多的参数,而其中ESO的3个控制参数β01、β02、β03是决定控制器性能的重要参数,而且这3个参数差值较大,调节起来较为复杂,所以采用粒子群算法对ESO的3个参数进行寻优整定,基本过程如下:
(1)进行初始化,设定ESO的3个待优化参数β01、β02、β03,产生粒子群的初始位置和速度。
(2)进行个体评价,由式(11)的适应度函数求出种群中所有粒子的适应度值。
(3)得出粒子的新位置和速度。根据粒子的适应度与粒子群个体最优解Pbest和全局最优解gbest进行比较,得到粒子的最新速度与位置。
(4)求得最优解,当满足条件时,输出全局的最优解β01、β02、β03,并带入到ESO中,若不满足条件则转至(2)。优化后的自抗扰控制器结构如图3所示。

图3 优化的自抗扰控制器
4仿真结果
永磁同步电机的参数和负载受外界环境的因素影响很大,会随着环境的变化而改变。因此,仿真主要研究永磁同步电机控制系统在不同的负载和参数下,系统的控制精度。首先在Matlab/Simulink中搭建仿真模型,然后在不同的输入信号和干扰信号的情况下得出仿真图形,通过仿真图形对比,进一步分析不同的情况下,传统的PID控制性能与优化后的ADRC控制性能。选择合适的PMSM电机,仿真中所应用的PMSM参数如下表1所示。

表1 电机参数
ADRC的部分参数采用粒子群算法进行寻优整定,为了验证优化后的ADRC的控制性能,仿真中比较了在相同条件下,改进的ADRC与传统PID控制的性能指标。
为了检验优化后ADRC系统在加负载后的抗干扰能力,在其他条件完全相同的情况下,给定位置信号为40°的机械角度,并在t=0.3 s时加载3.0 N·m,t=0.5 s时卸载。仿真对比了阶跃信号下,ADRC与传统的PID控制的性能指标。图4所示为优化ADRC与PID抗干扰能力对比。
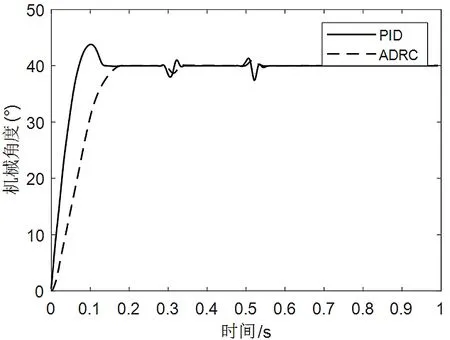
图4 优化ADRC与PID抗干扰能力对比
由图4可看出,与改进ADRC相比,PID达到稳定的时间较快,而且调节迅速。但是在启动、加载和卸载的时刻,PID控制都存在着较大的超调。反观ADRC,不仅跟踪速度快,而且启动过程不存在超调,在加载和卸载的时刻,相对传统的PID,也能较快的进行动态补偿,并且抑制扰动。验证了优化的ADRC具有更好的动态性能和稳定性。
上述仿真输入的信号为常值,下面对系统加入变化的随机负载扰动,进一步验证系统的稳定性和跟随性。
图5为加入变化的随即负载启动稳定性能对比,如图5(a)所示,加入变化的随即负载后,由于负载的变化较大,这2种控制性能都受到了一些影响。从图5(b)可以看出,ADRC的启动过程受到的影响并不大,仍然没有超调的出现,而且进入稳态的时间基本没有变化。反观PID制,不仅出现了较大的超调,且进入稳态的时间,也稍慢于ADRC控制。由此更能验证改进的ADRC具有良好的鲁棒性。
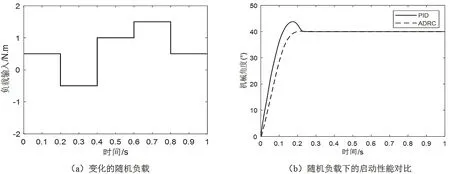
图5 随机负载下的启动稳定性能对比
上述仿真为阶跃响应对比,下面进行正弦跟踪仿真实验。设置20°的正弦波幅值,2 s为一个周期进行测试,其他控制参数不变。图6所示为正弦跟踪测试。
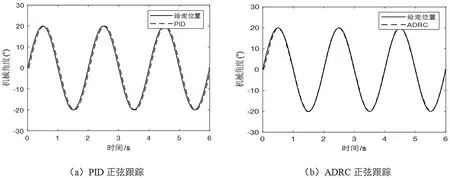
图6 正弦跟踪测试
由图6(a)可以看出,PID的跟踪曲线,较给定位置信号,出现了0.06 s的滞后,且滞后一直存在。反观图6(b)ADRC的正弦跟踪测试,前0.5 s,ADRC的正弦曲线较跟定信号,也出现了一些滞后,但是到了0.5 s,ADRC的正弦曲线完全跟上了给定信号,并一直保持了下去,可见ADRC的正弦跟踪性能更加优越。由此可得,优化的ADRC与传统的PID控制相比,具有良好的动态性能和控制精度,且更适用于高精度的控制系统。
5结论
(1)提出了一种改进的永磁同步电机位置自抗扰控制系统。在PMSM控制系统中,采用矢量控制与自抗扰控制相结合的控制策略。同时采用自抗扰位置控制器,代替了速度环和位置环,构成双环控制模式。并用粒子群算法优化自抗扰控制器的部分控制参数,使控制器进一步优化。
(2)通过仿真,对比了优化后的ADRC与传统的PID的控制性能,结果表明改进的ADRC具有良好的动态性能,响应速度快,抗干扰能力更强,更适合高精度控制系统。
猜你喜欢
防爆电机(2022年3期)2022-06-17
防爆电机(2022年3期)2022-06-17
防爆电机(2022年3期)2022-06-17
防爆电机(2022年3期)2022-06-17
防爆电机(2022年3期)2022-06-17
防爆电机(2022年2期)2022-04-26
防爆电机(2022年2期)2022-04-26
科学与财富(2017年15期)2017-06-03
科技创新与应用(2017年1期)2017-05-11
科技与创新(2017年3期)2017-03-17