
基于两轴的小倾角GSO天线跟踪平台
2021-07-04 11:12潘良勇
数字通信世界 2021年6期
潘良勇,杨 祺,张 毅
(南京熊猫汉达科技有限公司,江苏 南京 210000)
1 小倾角GSO卫星
随着在轨运行卫星数量的增多,航天技术的发展,小倾角GSO卫星开始逐步使用。相较于传统的静止轨道卫星,小倾角卫星具备相对运动的特征, 地面卫星天线的理论俯仰角、理论方位角一直处于运动状态,需要实时跟踪与修正,对大口径天线的跟踪带来一定的难度。
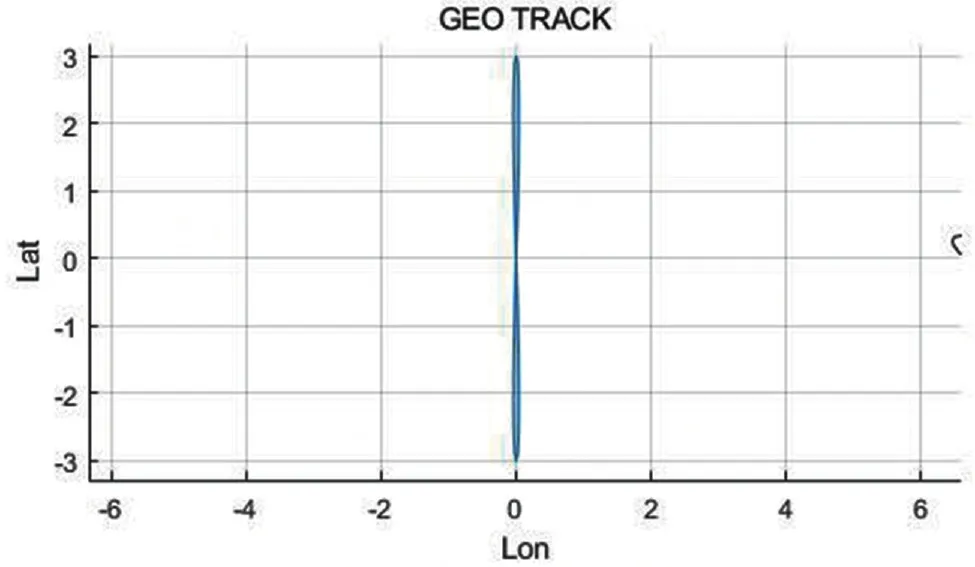
图 1 小倾角卫星星下点轨迹示意图
小倾角卫星的运行轨道是同步倾斜轨道,轨道倾角为3o,卫星的星下点轨迹是以24小时为周期, 在纬度-3o~3o之间,经度-0.0393o~0.0393o之间按8字形做周期运动。
天线的波束指向角也随卫星运动轨迹24小时周期变化,其中经度相同时俯仰角变化最大,为12小时变化6.8°,经度差30°时的方位角变化最大,为12小时变化5.5o。俯仰角和方位角平均变化率都小于0.6o/h。
2 天线跟踪方案
天线主要用于跟踪静止同步轨道,采用指向角计算加信标跟踪方式,该跟踪方式对星快、指向准。小倾角卫星经度、纬度、高度随地球转动均发生变化,通过卫星星历参数计算指向角,采用这种指向角计算加卫星信号跟踪的方式进行跟踪,同时增加指向角逆向推导星下点位置以及卫星星历的过程;卫星星历参数未知,通过指向中心点加扫描的方式跟踪上小倾角卫星,根据变化率逆向推算出卫星星历参数。
天线在进行卫星的跟踪时需要额外考虑到卫星的位置信息会随着时间变化,在已知信息不变的条件下需要进行卫星位置的预测来进行跟踪。天线以MEMS导航系统为测量基准做指向控制,采用卫星信号闭环稳定跟踪技术,保证天线具有极高的跟踪精度,方案原理图如图2所示。
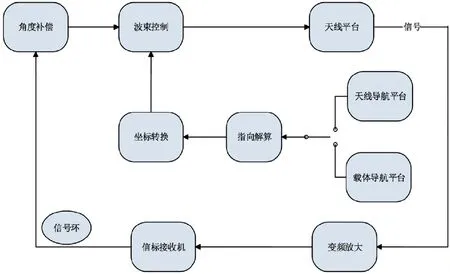
图2 跟踪控制方案框图
卫星天线根据星历参数计算理论位置后启动捕获,在预定空域内进行方位、俯仰轴扫描,当扫描过程中卫星信号高于门限后自动切换至跟踪模式。
跟踪控制模块包括程序引导和自动跟踪两种模式,默认在程序引导模式下自动进行,可发送命令信息控制伺服控制单元。在自动跟踪模式下,启动伺服控制算法中的信号跟踪环,对卫星信号强度进行自动跟踪,保证天线的稳定跟踪指向。跟踪控制处理流程如图3所示。
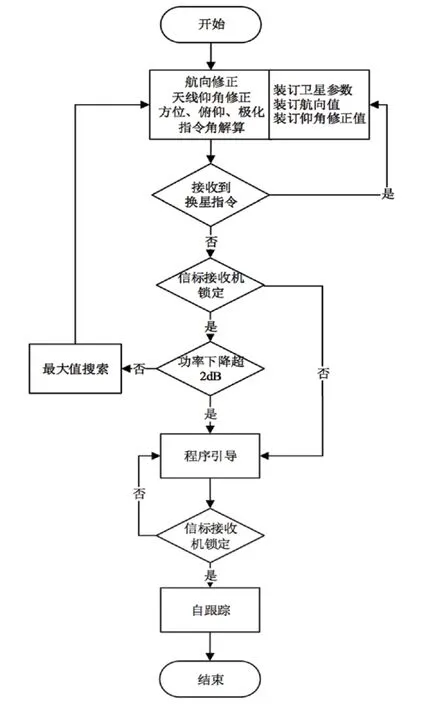
图3 自动跟踪流程图
天线伺服跟踪系统可以通过已知卫星星历计算卫星指向角或未知卫星星历时的运行轨迹中心指向及圆锥扫描,实现天线方位、俯仰指向调整,锁定卫星后进行稳定跟踪。跟踪误差可控制在0.2 dB以内,对验证终端通信的连续性、稳定性基本没有影响。跟踪过程接受站控设备统一管理,支持低于门限参数时的自动跟踪。
3 两轴稳定平台抗扰动分析
天线伺服控制平台利用惯性系统提供的姿态(真航向、横滚、俯仰),北斗/GPS获得的地理位置参数,加上卫星位置参数,经控制单元计算得出天线俯仰角和方位角精确数据。通过伺服系统实时调节天线系统的方位、俯仰与极化角,实现天线对卫星的快速捕获和跟踪,使天线波束始终对准卫星。
当天线所处位置不再水平,载体姿态发生变化时,天线伺服平台通过惯性组件的反馈能够实时调整天线的转角,从而实现卫星的跟踪。
目前,公司生产的空军/陆航/陆军系列动中通天线主要依靠载体的姿态采集设备(如北斗、惯导、航姿仪等)获得载体的姿态数据,然后利用编码器的脉冲反馈实时更新天线的转角位置信息,最终实现天线控制平台的闭环控制。该伺服控制方案严重依赖于载体的姿态采集设备,使得目前生产的天线通用性较差,且由于闭环控制属于反馈调节, 实时性较差,载体姿态数据和天线转角信息的滞后都将导致天线控制平台产生较大的控制误差。
为了尽量减小系统延时带来的控制误差,本次项目中除了提高惯性单元的刷新频率外,还采用了双馈(前馈加后馈)模型来获得更快的控制相应。同时,为了消除惯导漂移带来的影响,平台通过圆锥扫描跟踪来补偿稳定平台跟踪的不足之处。
4 仿真及跟踪精度对标
稳定平台使用中国电科58所的国产芯片JDSP28335+M4芯片搭建,ARM主要针对外部接口的输入及逻辑处理,DSP部分负责模型的推导与电机的控制。
根据应用领域来确定外部角速度输入的硬件配置方案:微机电系统(MEMS)陀螺仪与北斗/ GPS结合的方案。在此MEMS IMU中使用的核心传感器具有固有的振动抑制能力和线性度,不仅使得它们的性能适合高动态应用,而且还在极端环境条件下具有稳定性和可预测性。对测量三轴数据进行卡尔曼滤波后的角位移、加速度值,经过模型计算后由DSP伺服系统计算的角偏移并对信号放大后输出到执行单位,对载体运动进行隔离。
运动控制算法使用目前较为成熟的PID位置环、速度环和信号跟踪环三级闭环稳定跟踪算法。首先通过MATLAB仿真确定PID初始参数,再通过实际系统联调进行参数微调最终达到一个理想的控制效果。仿真分阶跃响应和正弦曲线响应两种条件进行仿真,如图4、图5所示。
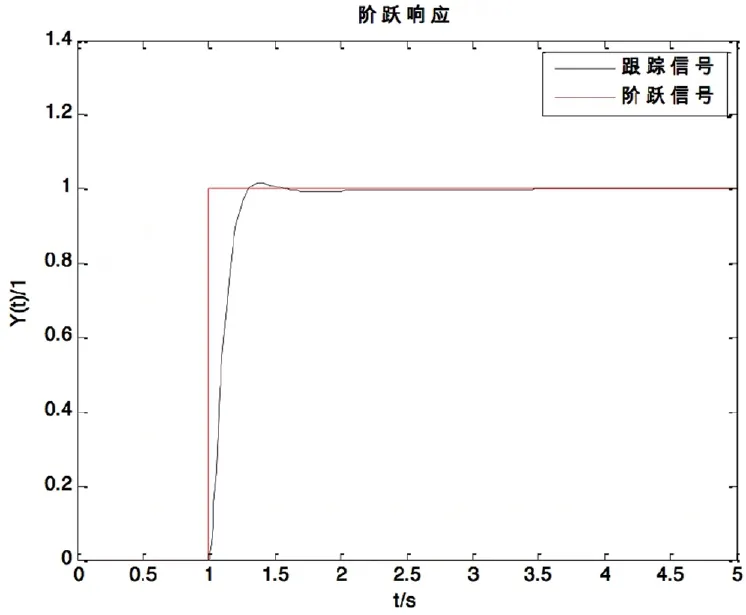
图4 阶跃响应仿真图
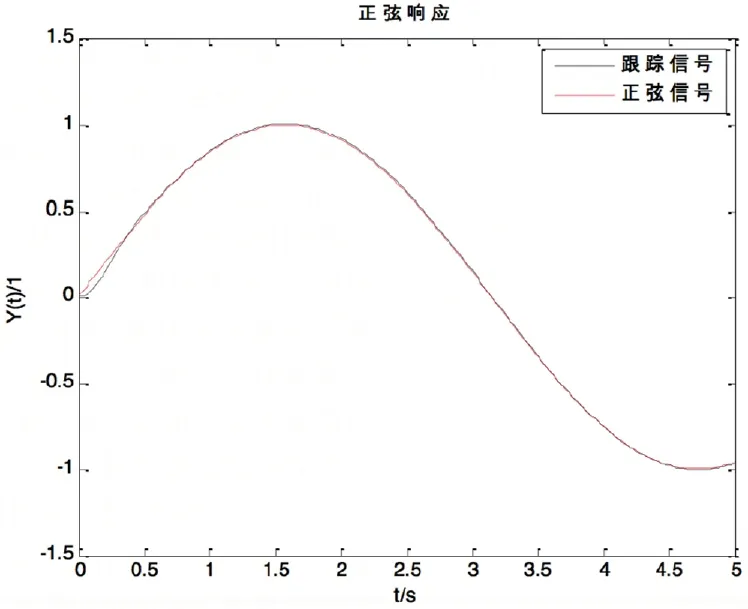
图5 正弦响应仿真图
基于MEMS的方案在小型化,高性价比等方面具有先天优势,同时稳定的跟踪技术使设备能够实 时跟踪并修正天线设备的理论指向,并对理论角进行反推;同时根据仿真结果,目前的跟踪算法可以弥补MEMS的惯导的漂移使得这方案被广泛应用于GSO卫星通信系统。
5 结束语
基于载体角速度的稳定平台可以隔离载体的扰动,借助信标的跟踪算法融合修正,同时根据实时跟踪的角度偏差反向修正卫星理论角,可以极大提高天线指向准确性及响应速度,有效地隔离运动载体的姿态变化,提高了天线系统的指向精度,保证设备能在高动态环境下进行精准的指向倾斜轨道的卫星,保障设备通信稳定,有很好工程及技术价值。
猜你喜欢
科学大众(2021年19期)2021-10-14
中学生数理化(高中版.高考数学)(2021年6期)2021-07-28
北京汽车(2021年3期)2021-07-17
科学大众·小诺贝尔(2021年10期)2021-01-22
学生天地(2020年3期)2020-08-25
福建基础教育研究(2019年6期)2019-05-28
汽车观察(2018年9期)2018-10-23
诗选刊(2015年4期)2015-10-26
航天器工程(2014年5期)2014-03-11
阅读(中年级)(2009年11期)2009-04-14
