基于模型预测控制的飞翼无人机抗侧风着陆规划技术
2021-07-05 11:59邵朋院董彦非屈高敏
电子技术与软件工程 2021年10期
邵朋院 董彦非 屈高敏
(西安航空学院飞行器学院 陕西省西安市 710000)
飞机着陆阶段是最容易出现飞行事故的阶段之一,而恶劣天气是导致着陆时发生飞行事故的最主要原因[1],其中侧风是对飞机着陆影响最大的因素。在侧风作用下,飞机会产生侧向力和力矩,其中侧向力会使飞机运动轨迹偏离预订航迹,侧向力矩会使飞机带有一定的滚转角和偏航角。同时,在侧风作用下,飞机会产生较大侧滑角,侧滑角过大会严重影响飞机的内环控制性能和稳定性。特别是对于飞翼无人机来说,侧向只能使用阻力方向舵进行控制,控制能力较差[2],所以在着陆阶段侧风对其内环控制影响更大。
目前,在侧风中着陆的横侧向控制策略主要有侧航法和侧滑法两种[3]。侧航法通过将机头方向朝向侧风方向,而消除侧滑角,但是由于机头方向和跑道方向不一致,所以在接地后飞机滑跑方向与跑道中心线方向也不一致,在侧偏角过大时有冲出跑道的危险;侧滑法机头方向与跑道及地速方向一致,由于有侧风存在,会存在一定侧滑角,并且为了平衡侧滑角造成的侧力,需要飞机带一定的滚转角,而对于展弦比较大的飞翼无人机,在大滚转角下有翼尖触地的风险,也会影响飞行安全。关于侧航法和侧滑法着陆的原理和存在问题的详细分析,见本文第1 小节。
综上所述,飞翼无人机单纯用侧航法和侧滑法着陆都存在一定问题,本文结合侧航法和侧滑法的优点,提出一种基于模型预测控制(ModelPredictiveControl, MPC)[4]方法进行运动规划的抗侧风控制策略。该策略从着陆拉平段开始,在侧向通过MPC 规划,规划出一条可行的动作轨迹,使得着陆瞬间飞机的状态满足指定值或者指定范围约束。使用该策略可以提高飞机在复杂天气情况下的着陆安全性。
1 着陆规划策略
1.1 横侧向运动模型
为了便于横侧向运动进行分析与设计,先给出飞翼无人机的横侧向运动模型。由于本文研究重点为着陆策略,为简化问题,所以只给出外环运动模型。
如图1所示,为简化期间,设跑道方向为正北,则飞机的偏航角即为机头和跑道之间的夹角(后文中简称为交叉角)。则空速为:
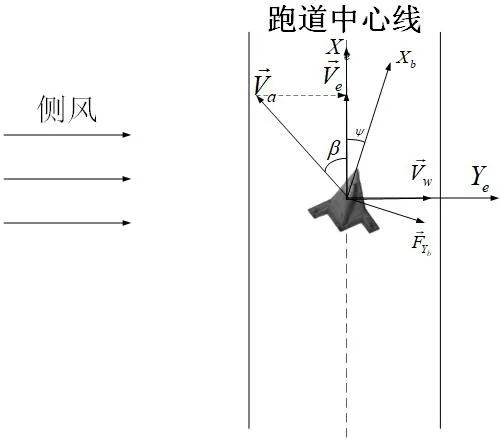
图1:风场下受力分析图(侧向)

选取系统状态变量为:

输入为:


下面根据式(2)可以对侧滑法及侧航法的着陆策略进行分析,并提出本文的着陆策略。
1.2 已有方案分析
1.2.1 侧航法
侧航法示意图如图2所示。

图2:侧航法示意图
如图2所示,侧航法着陆时飞机机头会往侧风向偏移,形成一定的交叉角。侧航法其实是飞机侧风着陆时在航向静稳定性下的正常响应,在航向静稳定性的作用下,飞机的侧滑角为0,所以侧向力也为0,从式(5)可知,在滚转角也为0 的情况下,则飞机可以维持侧向位置的平衡。
所以,在侧航法着陆策略作用下,优点是飞机的滚转角为0,侧滑角为0,所受侧向力即(飞机的侧向载荷)为0;缺点是交叉角不为0,即机头方向和跑道方向不一致,若一直以侧航法着陆,则在接地时,飞机的滑跑方向与跑道方向差别较大,有冲出跑道的危险。
1.2.2 侧滑法
侧滑法的原理如图3所示。在侧滑法策略作用下,飞机机头方向和跑道方向一致,避免了接地后滑出跑道的危险。结合式(2),要使飞机的侧向位置达到平衡,则需要满足。

图3:侧滑法示意图

当飞机的着陆速度和风速都确定的情况下,侧滑角及侧力也已确定,即侧向力为:

要侧向运动平衡,则有:

所以需要满足式(3)才能使得侧向运动平衡,即飞机一直沿着跑道中心线下滑着陆。但是在稳态时会带一定的滚转角。同时,侧滑角为固定值,由于侧滑法与侧航法稳态速度一致,所以侧滑角与式(2)的中对应侧滑角值相同。
所以,侧滑法虽然能满足飞机机头方向与跑道方向一致(即交叉角为0),但是在稳态时必须带有一定的滚转角和侧滑角,对于无尾飞翼飞机来说,侧滑角对着陆影响较小,但是滚转角过大也对着陆安全不利,对于大展弦比飞机有翼尖着陆的危险。而且,在着陆末端使用侧滑法,则飞机丧失了侧向纠偏能力,所以在着陆末端也无法保证纠偏。以上分析表明,使用侧滑法也不能满足飞翼无人机侧风着陆的要求。
1.3 本文提出策略
从上述分析可知:侧航法的主要问题是机头方向和跑道方向不一致,而优点是没有侧滑角,从而没有侧力,无需滚转角即可平衡;侧滑法的主要问题是需要滚转角来使用升力分量来平衡侧力,而且丧失了侧向纠偏能力,而优点是机头和跑道方向一致,及交叉角为0。
在着陆末端,如果满足侧向偏离,侧向速度,交叉角及滚转角均为0,则能实现比较理想的着陆。即:

若在接地时,滚转角和交叉角均为0,由式(2)可知:

所以,式(4)的条件无法在稳态实现。
本文提出一种能够在接地时实现式(4)终端条件的着陆策略。
该策略无需在接地时达到稳态,可以保证在接地时达到式(4)的状态。由于侧航法是飞机在侧风下着陆的自然响应,所以以侧航法达到稳态时的状态为初始状态。
设飞机的初始状态为:

该策略即让飞机从初始状态(5)在接地时转化到终止状态(4)。如图4所示。
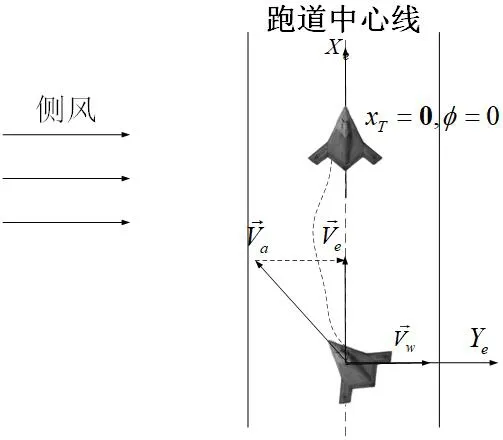
图4:本文提出策略
假设纵向运动和横侧向解耦,则从开始高度到接地的时间确定,假设时间为,考虑到在着陆过程中尽量避免较大机动,而且侧滑角过大会增加控制难度,所以以整个控制过程中控制代价和控制过程中侧滑角加权代价最小为目标,记式(2)为:


其中,J 为代价函数,表达式如下:

式(7)可以归结为一个动态系统在输入约束下从初始状态在规定时间内运动到给定终端状态,且使代价函数最小的动态系统轨迹优化问题,该类问题在数学上属于最优控制问题,可以使用模型预测控制的方法进行求解。
2 问题求解
可以看出,式(6)为一个非线性系统,所以问题(7)为一个非线性模型预测控制(Nonlinear Model Predictive Control, NMPC)问题,该问题可用ACADO 工具箱[5]求解,ACADO 可以调用多种求解器使用SQP 方法[6]求解NMPC 问题,并且ACADO 工具箱提供了Matlab 接口,同时可以生成C++代码来高效的求解最优控制问题(Optimal Control Problem, OCP)。关于ACADO 的详细用法可以参考文献[7]。
3 在飞翼无人机中的应用
假设着陆阶段纵向与横侧向解耦,本文所研究的侧向抗风运动规划主要作用于飘落阶段,飞翼无人机着陆段纵向控制律设计可以参考文献[8]。
在飘落阶段开始时,飞机的纵向运动已经达到稳态,在本例中为下沉率。在进入飘落段时,设飞行高度为H,空速为V0,则飘落时间为:。
从下滑段开始,飞机横侧向执行侧向纠偏控制律,则飞机的自然响应与前文中侧航法描述一致。则进入飘落段时的初始状态已经达到如下稳态:

着陆末端飞机响应如图5。
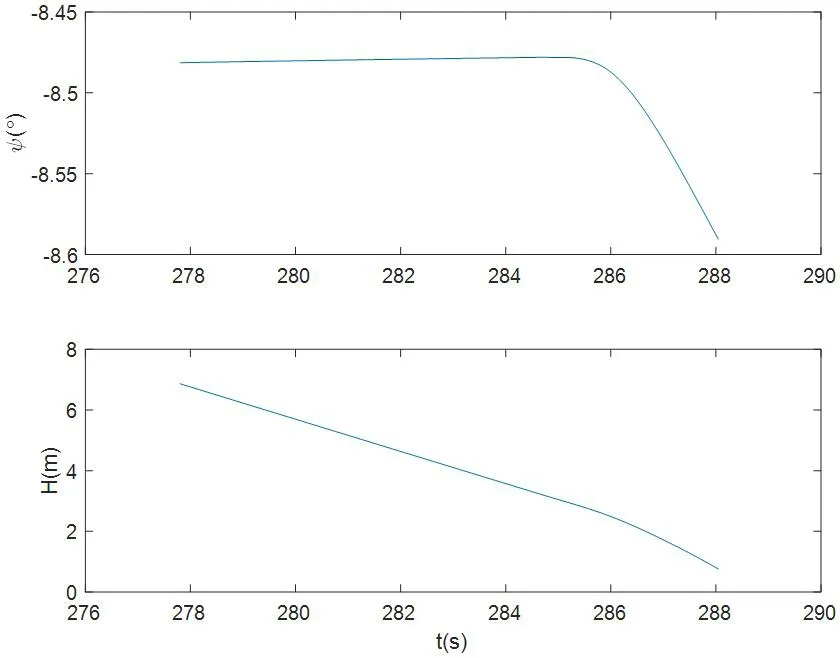
图5:着陆末端偏航角和高度响应
从图5可以看出,在着陆末端飞机偏航角基本稳定在8.46°左右,特别是在着陆前10 秒时基本达到稳态,在接地前的小幅波动是因为受地效影响。
以图5 中着陆前10 秒(t=277.8s)的状态为初始状态,根据飞机性能约束,将滚转角指令约束到±30deg,偏航角速率指令约束到±30deg/s。分别使用侧滑法和本文提出的规划策略。得到相关响应如图6‐图10所示。
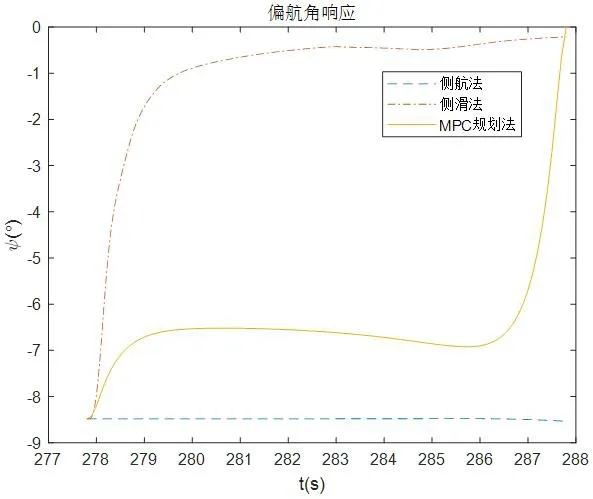
图6:侧风着陆偏航角响应

图7:侧风着陆侧滑角响应

图8:侧风着陆侧向速度响应
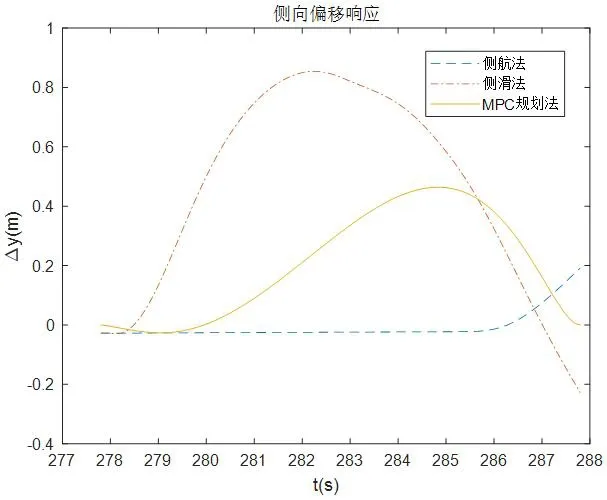
图9:侧风着陆侧向偏移响应
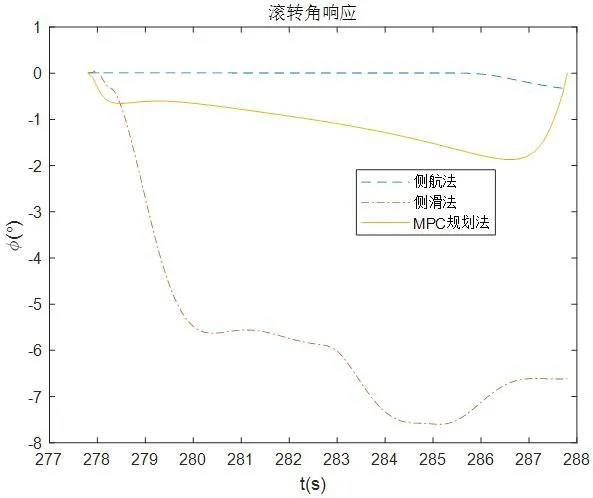
图10:侧风着陆滚转角响应
从图6到图10可以看出,侧航法着陆末端有个较大的交叉角(偏航角),而侧滑角、滚转角、侧向偏移和侧向速度接近0;侧滑法着陆末端交叉角、侧向偏移和侧向速度接近0,而侧滑角和滚转角较大;本文提出的基于运动规划的方法可以满足着陆末端的交叉角、侧向速度、侧向偏移和滚转角均为0,有一定的侧滑角。仿真结果与第1 节理论分析一致,而飞翼无人机对于侧滑角有一定的容忍能力,所以上述三种策略只有本文提出的基于运动规划的方法可以满足飞翼无人机侧风着陆需要。
4 结束语
本文对飞翼无人机侧风着陆的运动规划策略进行了研究,提出了基于模型预测控制的着陆运动规划方法,并通过理论分析和仿真实验对本文提出策略和侧滑法以及侧航法等传统方法进行了对比,理论分析和仿真结果均证明,在三种方法中只有本文提出的基于运动规划的方法能够满足飞翼无人机侧风着陆需求。
由于模型预测控制方法需要在线求解最优化问题,所以对算法的实时性要求较高,本文在仿真环境下可以满足实时性要求,而在实际的嵌入式计算机下,设计结果能否满足实时性要求,可能是需要下一步深入研究的一个问题。
猜你喜欢
中学生数理化·七年级数学人教版(2021年9期)2021-11-20
北京航空航天大学学报(2018年1期)2018-04-20
北京航空航天大学学报(2017年5期)2017-11-23
解放军健康(2017年5期)2017-08-01
知识经济·中国直销(2016年2期)2016-11-07
西北工业大学学报(2015年4期)2016-01-19
中国塑料(2015年6期)2015-11-13
海军航空大学学报(2015年3期)2015-11-11
交通建设与管理(2015年13期)2015-03-20
中国设备工程(2014年1期)2014-02-28