一种四足行走机器人结构设计
2021-07-13 04:36韦勇陈美玲崔安琪罗秋艳胡义华
科技创新导报 2021年36期
韦勇 陈美玲 崔安琪 罗秋艳 胡义华




基金项目:柳州市科技开发项目(项目编号:2017BA20203)。
作者简介:韦勇(1971—),男,本科,工程师,研究方向为机械制造工艺与设备。
通信作者:胡义华(1972—),男,硕士,副教授,研究方向为工业机器人技术。E-mail:huyh2003@163.com。
摘要:本文设计了一种四足步行机器人,其可在搭载平台装置条件下来平缓完成直线及转弯运动。首先,对步行机器人的行走和转弯结构进行尺寸设计;其次用ProE和CAD软件对该推进系统平台进行三维建模;最后通过机构行走过程仿真进行机构的动作及速度验证,结果表明,该设计机器人能够平缓完成预期动作,为以后开发这种结构的行走机器人提供了参考。
关键词:四足机器人;结构设计;三维建模;运动仿真
中图分类号:TP391 文献标识码:A
中图分类号:TH12
DOI:10.16660/j.cnki.1674-098X.2201-5640-7674
Abstract: In this paper, a quadruped walking robot is designed, which can smoothly complete straight line and turning motion under the condition of carrying platform device. Firstly, the walking and turning structures of the walking robot are designed. Secondly, the ProE and CAD software are used to make 3d modeling of the propulsion system platform. Finally, through the simulation of the walking process of the mechanism, the action and speed of the mechanism are verified. The results show that the designed robot can smoothly complete the expected action, which provides a reference for the future development of the walking robot with this structure.
Key words: Quadruped robot; Structural design; Three-dimensional modeling; Motion simulation
近年來,机器人广泛应用于军事、能源、汽车等行业,所以如何研发出运行效率高、稳定性好、功耗低的机器人具有重要意义[1-2]。目前,国内外已投入市场或服役的行走机器人虽种类繁多,但都具有一定应用局限性,如履带式机器人中的履带结构导致的转向缓慢困难,经济性差,噪音大;轮式移动机器人可以转向相对灵活,但仅适用于地面平坦的道路,在恶劣的野外山地、沼泽地等地形中难以应用。而步足式机器人性能介于两者之间,其结构简单,制造成本低,虽承载小,但具有良好的机动性。本文根据步足式机器人具有的良好机动性、稳定性以及低能耗的特点,设计一种可以自由行走的四足机器人,其可以在搭载负载平台的条件下在陆地等复杂环境下可靠工作。
1 工作原理
本设计的目的是设计一款能自由行走的四足机器人,要求该结构的行走机器人在行走过程中四足协调,在直线行走和转弯的过程中始终保持平稳。
为了便于控制,提高整个机构的运行可靠性和稳定性,本设计采用每一条腿的运动由一个独立的电机控制,转弯由另外的独立电机控制,下文详细介绍四足行走机器人的腿部和转弯机构的设计。
2.1 机器人腿部结构设计
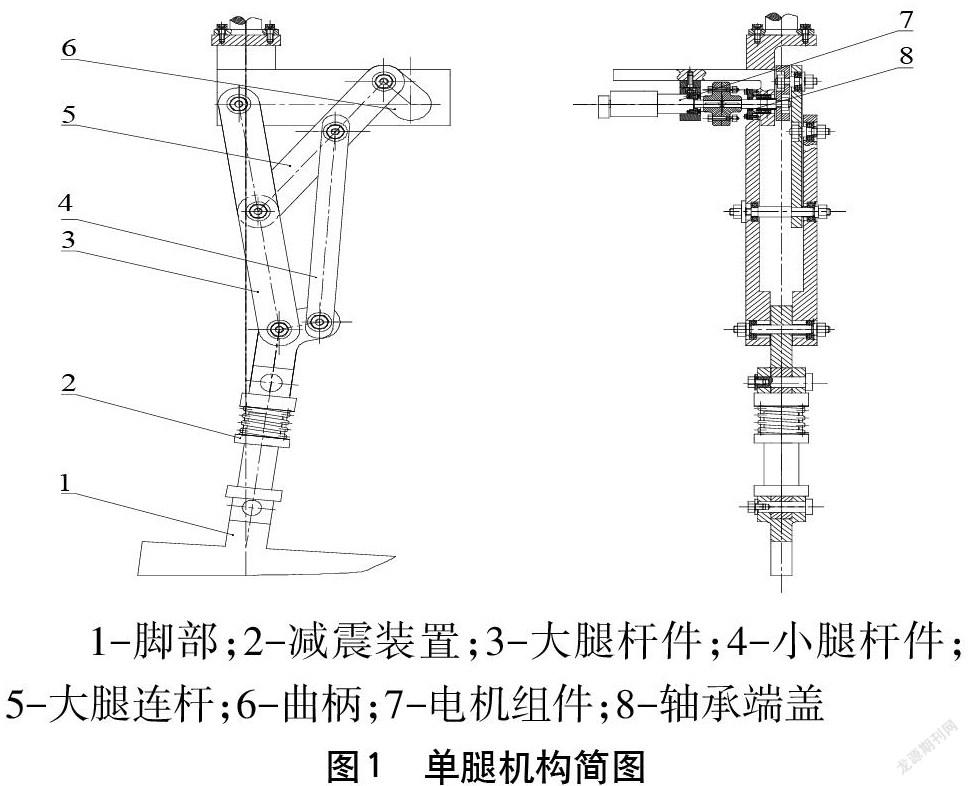
为了实现腿的基本功能,完成抬起、弯曲、向前跨步、然后落地的4个动作更加平稳,机器人腿部运动结构采用典型的平面六连杆机构,每个腿由独立的电机驱动,电机首先驱动曲柄,然后带动小腿和大腿联动,实现脚部的移动。大小腿连杆全部由低副组成,脚部设计成人足形,便于与在小腿摆动时与地面更好地接触。通过控制4个电机的驱动顺序,实现双腿联动的方式实现四足移动,单个腿部的详细结构如图1所示[3]。
2.2机器人转弯结构设计
为了保证转弯时前后两条腿动作协调,分别采用4个电机控制前腿和后腿。其中,控制原理均为电机通过驱动轴驱动一对直齿圆锥齿轮,通过齿轮的转动带动传动轴,传动轴下面连接腿部,实现机器人的转弯运动,详细结构如图2所示。在转弯过程中,为了保证四足的转弯协同,通过调节4个电机的转动的频率与转动的幅度,来实现转弯过程中的整个机器人转弯的方向控制,进而能控制机器人正常行走工作。
当机器人完成直线行走时,仅通过腿部电机驱动曲柄,通过曲柄带动连杆机构进行转动,实现机器人的直线行走;当机器人在行走过程中前方遇到障碍物时,控制转弯的时候,分为两个控制过程:一是转弯电机输出轴旋转推动锥齿轮的转动,四足依次侧方向偏转完成相应的角度;二是行走电机依旧控制前进。当转弯行走完成以后,转弯电机依次控制四足反转相应的角度使机器人的腿部恢复到正常位置,继续向前保持直线行走[4]。
2.3整体结构方案
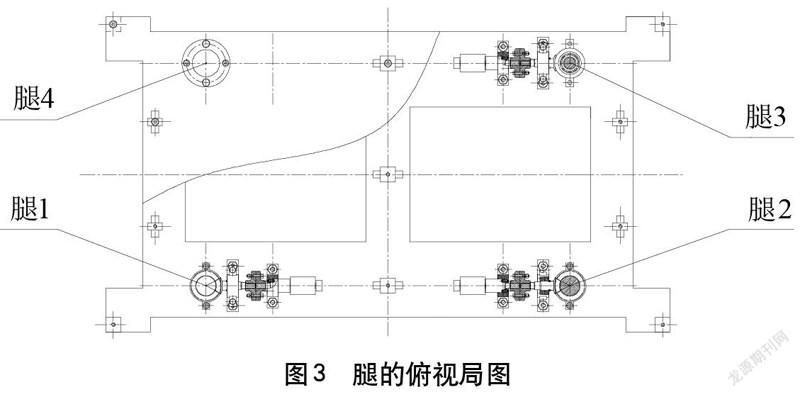
为了保证机器人在行走及转弯时各足间的不产生干涉问题,以及4个电机的合理布置使四足的受力对称,该四足行走机器人采用上部平板式布局,4个转弯电机及四足的结构采用前后对称布局,整体结构方案设计详细结构如图3、图4所示[5]。
通过图3和图4看,在采用这种布局方式时,为了避免转弯侧翻或前后腿间运动时的干涉,前后腿的间距、前腿间、后腿间的间距都应进行合理布局。另外,整个机器人的重量也要进行轻量化设计。
3 四足机器人三维建模
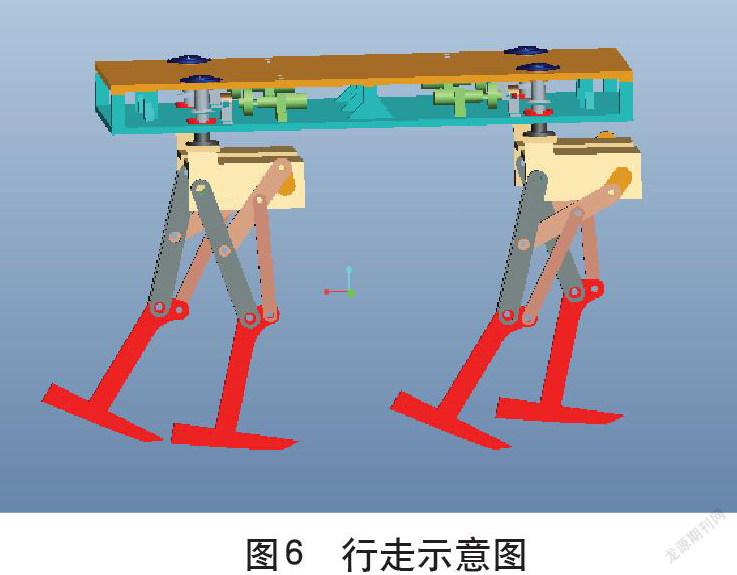
通过整体布局设计,在对本机构进行详细的结构尺寸设计后,为了检验整个机构运行的具体情况,采用Pro/E软件对步行机器人的整体结构进行三维建模及结构运动仿真,检查各部件间是否存在尺寸不合适、装配干涉[6]及运动是否协调。通过Pro/E软件,分别构建了行走机器人站立、小跑姿态、转弯的三维模型,分别如图5、图6、图7所示。
由图5可见,当机器人站立时,四足同时支撑地面,这是机器人的初识位置。
由图6可知,当机器人在相对平坦无障碍条件下直线行走时,单个腿的运动是由腿部电机带动大腿曲柄连杆机构实现摆动,同时大腿连杆带动小腿連杆上下摆动,从而实现机器人单腿行走时的全部动作过程。通过控制4个电机的协调完成四足动作,带动机器人完成直线行走。在整个运动过程中,始终保持四足中斜对两足同时离开地面,另外两足支撑整个机体。
由图6可知,在行进过程中遇到障碍物时,行进电机带动前行的同时,转弯电机带动转弯结构中锥齿轮旋转实现机器人腿部进行侧方向偏移,腿部的偏移需在足部离开地面时进行[7-8]。
4机构运动仿真
为了验证机构运行的平稳性,对本结构的机器人进行了机构运动仿真。本次仿真设置单次步距为0.02m,整个结构行走的速度为0.02m/s。通过机构仿真规划了机器人小跑时的步态运动分析图,规定初试运动时,首先是左前脚和右后脚运动,左前脚和右后脚着地后右前脚和左后脚运动抬起,然后交替进行完成行走,如图9所示。通过行走的运动仿真,得到单个脚步的运动轨迹曲线如图9所示。
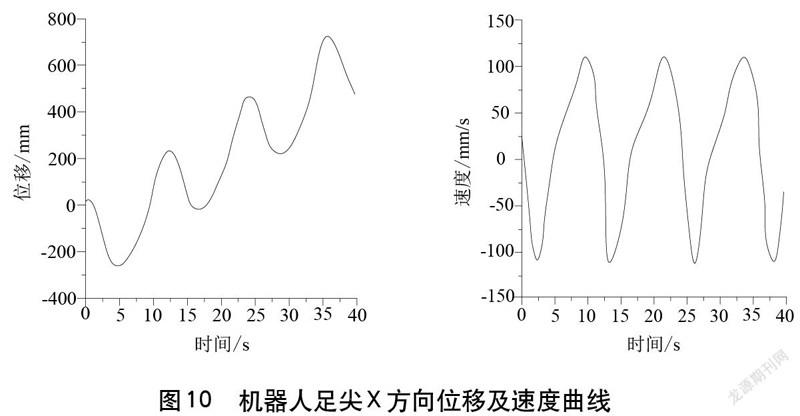
为了进一步机构运动的可行性,采集了机器人单个脚趾在行进方向(X)上的位移和速度曲线,如图10所示[9-10]。由动态曲线可知,该行走机器人的步态周期位置为,实际行走周期为12s,位移为。由于速度是周期性变化的,其行走速度约为0.0117m/s。在行进过程中,曲柄旋转一次,机器人前进一步。通过仿真发现,在直线行进中,速度是恒定的,当转弯时,速度会有一定的衰减,但行进过程比较平稳。
通过结构仿真发现,采用该结构能实现最初的设计目标,机器人能够按照预计的设计要求完成相应的动作,运动过程平稳,但实际的运行速度较理想状态稍低,足部没有设计减震装置,地面适应性较差。通过仿真后,后续可对机器人足部设计减震装置,然后进行机器人的实体设计,进行实际机构的真实环境测试。
5 结论
为满足陆地等复杂环境下可靠工作,本文设计了一种能自由行走的四足步行机器人,通过机构运动仿真验证了该四足机器人可以完成直线及转弯行进,机器人的背部可以搭载平台装置来完成其他任务要求。在仿真中本文仅对行走机器人的直线行走和转弯进行了简单的仿真,没有对机器人的具体运动进行试验分析,在接下来的研究中需要输入机器人步行机构和转弯机构具体的运动角度,从而对行走机器人进行更加准确的试验研究,具体结论如下:
(1)通过规划步行腿的运动原理、各个连杆的尺寸关系及控制方式,能够实现机器人的直线步行及转弯行走;
(2)通过三维软件Pro/E建模及机构运动仿真,该结构的四足机器人能够满足设计要求;
(3)目前设计的机器人地面适应性较差,还需进一步对腿部进行优化设计,进一步研究机器人运动参数的精准控制及运动稳定性能。
参考文献
[1] 汪世庆,单鑫,刘逸驰.四足机器人的发展现状及趋势[J].造纸装备及材料,2020,49(4):227-228.
[2] 门宝,范雪坤,陈永新.仿生机器人的发展现状及趋势研究[J].机器人技术与应用,2019(5):15-19.
[3] 吴伟国,工业机器人操作臂设计[M].哈尔滨:哈尔滨工业大学出版社,2020.
[4] 胡明伟,王洪光,潘新安.基于正交设计的协作机器人全域结构优化设计[J].吉林大学学报:工学版,2021,51(1):370-378.
[5] 马广英,刘润晨,陈原,高军,徐丕兵.4足机器人腿部机构运动学分析及步态规划[J].北京理工大学学报,2020,40(4):401-408.
[6] Yaqub, S., Ali, A., Usman, M. et al. A Spiral Curve Gait Design for a Modular Snake Robot Moving on a Pipe[J].Int. J. Control Autom. Syst.2019(17):2565–2573.
[7] Itani, O., Shammas, E. Motion planning for redundant multi-bodied planar kinematic snake robots[J].Nonlinear Dyn.2021,104:3845–3860.
猜你喜欢
中小企业管理与科技·上旬刊(2016年12期)2017-01-05
汽车科技(2016年6期)2016-12-19
东方教育(2016年3期)2016-12-14
科学与财富(2016年15期)2016-11-24
电脑知识与技术(2016年24期)2016-11-14
科技视界(2016年10期)2016-04-26
中国房地产业(2016年2期)2016-03-01
中国房地产业(2016年24期)2016-02-16