八杆并联缓冲平台结构参数对系统固有频率的影响
2021-07-15 14:44张宇航金映丽
河南科技 2021年6期
关键词:固有频率
张宇航 金映丽

摘 要:作战舰船在海面执行任务期间,舰载惯性导航系统工作环境恶劣,为保证其导航精度,有必要安装隔振缓冲装置。本文以八杆并联缓冲平台为研究对象,根据矢量积法推导出雅克比矩阵,建立了广义固有频率数学模型,分析结构参数对系统固有频率的影响,并借助ADAMS软件进行验证。结果表明,所建广义固有频率数学模型正确,分析所得结果为类似多杆并联缓冲平台的优化设计提供理论指导。
关键词:惯性导航系统;多杆并联平台;固有频率;结构参数
中图分类号:TH113文献标识码:A文章编号:1003-5168(2021)06-0088-05
The Influence of the Structural Parameters of the Eight-Bar Parallel
Buffer Platform on the Natural Frequency of the System
ZHANG Yuhang JIN Yingli
(School of Mechanical Engineering, Shenyang University of Technology,Shenyang Liaoning 110870)
Abstract: During the operation of combat ships on the sea surface, the working environment of the shipboard inertial navigation system is harsh, in order to ensure its navigation accuracy, it is necessary to install vibration isolation and buffer devices. This paper took the eight-bar parallel buffer platform as the research object, derived the Jacobian matrix according to the vector product method, established a generalized natural frequency mathematical model, analyzed the influence of structural parameters on the natural frequency of the system, and verified it with the aid of ADAMS software. The results show that the mathematical model of the generalized natural frequency is correct, and the analysis results provide theoretical guidance for the optimization design of similar multi-pole parallel buffer platforms.
Keywords: inertial navigation system;multi-pole parallel platform;natural frequency;structural parameter
在復杂的海洋环境下,舰船上安装的惯性导航设备不仅需要承受螺旋桨或柴油机等机械设备周期性运动所产生的振动荷载,也会遭到海浪的拍打或敌方水雷、鱼雷等水上武器所产生的冲击[1]。为保证惯性导航系统的精度,人们必须在舰船和惯性导航系统之间安装缓冲装置,隔离外界激励对精密设备的干扰[2]。
多杆并联机构的工作原理是在每根伸缩杆上加装弹簧阻尼结构来达到减振的作用。并联机构不仅具有两个或两个以上的自由度,而且拥有结构紧凑、刚度高、承载能力强、累计误差小、速度快和精度高等特性,被广泛应用在精密设备的隔振抗冲击中[3]。然而,并联隔振平台工作期间,当外界激励频率与系统固有频率接近时,并联隔振平台不仅不能起到原有的抑制减振作用,反而会使被保护对象的振动加剧,造成系统失稳甚至丧失工作能力。因此,有必要对并联隔振平台的结构参数与固有频率之间的关系进行揭示,为并联隔振缓冲机构的设计与优化提供一定的理论支撑。
近几年,国内外研究学者对并联隔振缓冲机构进行了大量的研究。张春辉等[4]研究了被动式Stewart隔冲平台的刚度特性,为船舶设备抗冲击中的实际应用提供了理论和试验依据。段楠[5]基于形状记忆合金设计了一种安装在适配器和卫星之间的被动隔振器,通过分析振动幅值响应曲线发现该隔振器可以有效地隔离振动。另外,国外有研究针对Stewart平台建立参数化动力学模型,分析了支腿刚度、阻尼、惯性矩对系统振动特性的敏感度[6]。通过分析相关文献,人们可以发现,现有的研究重点集中在对支腿弹簧阻尼结构的改进,然而,并联隔振缓冲机构的其他结构参数对固有频率的影响也不应忽略。为设计出性能更加优良的隔振缓冲机构,有必要对其他结构参数对系统固有频率的影响进行深入研究。
本文以一种八杆结构的并联缓冲平台为研究对象,分析其缓冲杆刚度系数、上平台铰接点半径、上下平台近铰点夹角和上下平台质心距离等结构参数对系统六阶固有频率的影响,并对各结构参数对系统固有频率的影响程度进行分析,为后续类似并联平台的结构参数设计与优化提供一定的理论参考。
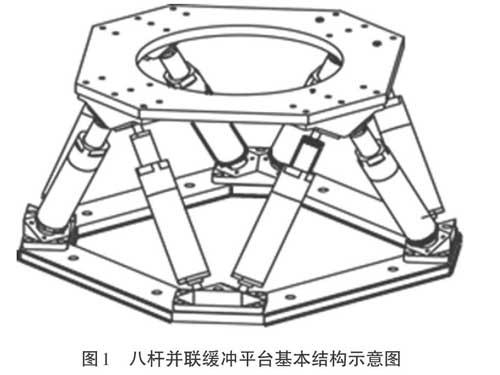
1 八杆并联缓冲平台基本尺寸描述
八杆并联缓冲平台的上平台装有惯性导航系统,下平台固定在舰船上,每一根缓冲杆都可以看作是一个单自由度的弹簧阻尼系统,采用球铰与上、下平台连接,结构示意图如图1所示。为了更加清楚地描述八杆并联缓冲平台在空间中的运动情况,对平台整体结构进行简化处理,如图2所示。建立两个坐标系作为参考坐标系,即动坐标系[AOAx′y′z′]和基坐标系[BOBxyz],其中,动坐标系[AOAx′y′z′]固定在动平台中,其坐标系原点[OA]与动平台的质心重合,[z′]轴垂直于动平台向上;基坐标系[BOBxyz]固定在基平台中,坐标原点[OB]与基平台的质心重合,[z]轴垂直于基平台向上。
人们可以分别连接上铰点[Ai]和下铰点[Bi],组成两个不等边对称八边形,其外接圆半径分别为[ra]和[rb],短边对应的圆心角分别为[θa]和[θb],八杆并联缓冲平台的铰点位置分布示意图如图3所示。
设基平台上表面至动平台下表面的高度为[h],八杆并联缓冲平台的基本尺寸可由5个参数确定,其分别是上平台外接圆半径[ra]、下平台外接圆半径[rb]、上平台近铰点夹角[θa]、下平台近铰点夹角[θb]、上平台与下平台质心距离[h]。
2 动力学建模
并联平台的动力学模型是一个变量多且相互之间存在复杂耦合的非线性模型,在建立动力学模型之前要对系统进行简化。若将上平台以及所装载的惯性导航系统、球铰、上球副座统称为动平台,视其为刚体,则整个系统可简化为图4所示的模型。
初始状态时,动坐标系[AOAx′y′z′]和基坐标系[BOBxyz]两个坐标系的方向相同。若定义动平台的质心相对于基坐标系[BOBxyz]的三个平移坐标和三个旋转坐标为广义坐标,即[q=x,y,z,α,β,γT],则该系统的运动方程可表示为矩阵形式,即
[Mq+Cq+Kq=Ft] (1)
式中,[M]为质量矩阵,与动平台、负载的质量以及其转动惯量有关;[C]为阻尼矩阵,与支腿的阻尼系数有关;[K]为刚度矩阵,与支腿的刚度系数有关;[q]、[q]、[q]为动平台的广义位移、广义速度和广义加速度列矢量;[F]为系统激励的六维列矢量。
2.1 推导雅克比矩阵
用向量[Ai]表示上平台连接铰点,向量[Bi]表示下平台连接铰点,每一个缓冲杆几何描述为它的长度[li]和方向,方向用单位向量[Si]表示。运动平台上[OA]的位置用位置向量[BP=px,py,pzT]表示,运动平台的姿态用旋转矩阵表示为:
[BRA=cosβcosγ-cosαsinβ+cosβsinγsinαsinβsinα+cosβsinγcosαsinβcosγcosβcosα+sinβsinγsinα-sinαcosβ+sinβsinγcosα-sinβcosγsinαcosαcosβ] (2)
每根缓冲杆的封闭环方程可以写为:
[liBSi=BP+BAi-BBi=BP+BRAAAi-BBi] (3)
将式(3)改写为:
[BP+BRAAAi=liBSi+BBi] (4)
对式(4)进行时间求导,得到式(5)。
[Bvp+BRAAAi+BRAAAi=liBSi+liBSi+BBi] (5)
相对于坐标系[AOAx′y′z′],向量[Ai]對时间求导的结果为零,即[AAi=0],同样[BBi=0]。同时,其满足以下条件:
[BRAAAi=Bw×BRAAAi=Bw×BAi] (6)
由经典力学中向量的绝对速度和相对速度之间的关系,单位向量对时间求导可写成式(7)的形式。
[liBSi=liBwi×Si] (7)
式中,[Bwi]为缓冲杆[i]在基坐标系[BOBxyz]中的角速度。
将式(5)、式(6)代入式(4)中,可得:
[Bvp+Bw×BAi=liBSi+liBwi×Si] (8)
因为[Bwi×Si]与[Si]正交,所以在式(7)两边同时点乘[Si],根据点乘和叉乘的交换律可得:
[Si?Bvp+BAi×SiBw=li] (9)
对于八杆并联平台,将式(9)写成矩阵形式:
[Li=Jq] (10)
式中,[Li=l1,l2,l3,l4,l5,l6,l7,l8T]为缓冲杆的速度。
将雅克比矩阵[J]写成[8×6]的矩阵,形式为:
[J=S1TBA1×S1S2TBA2×S2??S8TBA8×S8] (11)
2.2 广义质量矩阵的计算
动平台相对于动坐标系[AOAx′y′z′]的惯性张量[AI]定义为[3×3]的对称矩阵:
[AI=AIxx-AIxyAIxz-AIxyAIyy-AIyz-AIxz-AIyzAIzz] (12)
根据惯性张量平移和旋转的基本原理可得,动平台相对于基坐标系[BOBxyz]的惯性张量为:
[BI=BRATAIxx+my2+z2-AIxy+mxyAIxz+mxz-AIxy+mxyAIyy+mx2+z2-AIyz+myz-AIxz+mxz-AIyz+myzAIzz+mx2+y2BRA] (13)
动平台在固定坐标系[BOBxyz]中的质量矩阵为:
[M=m000000m000000m000000000BI000] (14)
2.3 广义刚度和阻尼矩阵的计算
根据虎克定理可得,缓冲杆微小位移[ΔL]和缓冲杆关节力[τ]的关系如下:
[τ=κ×ΔL] (15)
式中,[κ=diagk1,k2,k3,k4,k5,k6,k7,k8],其为[8×8]的对角矩阵。
在这个对角矩阵中,每个元素表示每根缓冲杆的刚度系数。根据雅克比矩阵的定义,人们可以得到以下公式:
[ΔL=J×ΔX] (16)
式中,[ΔX]为动平台无限小的角度位移向量。
动平台输出扭力三维向量[F=fx,fy,fz,nx,ny,nz]和缓冲杆关节力[τ]的关系如下:
[F=JT×τ] (17)
将式(15)、式(16)代入式(17),可得:
[ΔL=K×ΔX] (18)
式中,[K]为整个运动平台系统的广义刚度矩阵。
矩阵[K]用公式可以表示为:
[K=JTκJ] (19)
广义阻尼矩阵与广义刚度矩阵形式相同,同理可得:
[C=JTcJ] (20)
式中,[c=diagc1,c2,c3,c4,c5,c6,c7,c8]。
3 系統固有频率分析
系统的固有频率是系统振动的重要特性之一,在振动研究中有着十分重要的意义,它是避免共振的依据,也是多自由度解耦分析的前提。在对八杆并联缓冲平台进行缓冲分析时,为避免发生共振,应该使各阶固有频率尽量集中,以扩大隔振带宽,并且远离激励频率。因此,对系统结构参数在一定范围内的固有频率分布进行讨论是有必要的,可以为工程中结构参数的优化提供理论基础。
3.1 固有频率方程
由于固有频率只与系统本身的结构属性有关,所以将系统激励[[F(t)]]去掉,得到系统自由振动方程:
[Mq+Cq+Kq=0] (21)
当系统阻尼对系统固有频率的影响可以忽略时,该系统可作为无阻尼系统进行分析,由式(21)可得到代数方程:
[K-ω2MAi=0] (22)
式中,[ω]为系统固有圆频率;[Ai]为第[i]阶固有振型。
由式(22)可得,系统的特征方程为:
[D-λI=0] (23)
其中,参数[D]和[λ]可以用公式表示为:
[D=K-1?M] (24)
[λ=1ω2] (25)
将[ω2]按升序排序,即
[0<ω21≤ω22…≤ωnn] (26)
定义[fi=ωi=2πfi]为系统的第[i]阶固有频率。当[i]=1时,[f1]为系统的第一阶固有频率,也就是基频。
3.2 所建动力学模型验证
为检验所建动力学方程的正确性,本研究采用多刚体动力学仿真软件ADAMS建立八杆并联平台模型,如图5所示,并对其进行模态分析,将仿真所得结果与计算结果进行对比验证。
由表1可知,两种模型计算固有频率的误差很小,因此动力学模型正确,这为后续讨论相关参数对系统固有频率的影响提供了理论支撑。
4 结构参数对固有频率的影响
根据式(1)所示的动力学模型,本研究设定平台各结构参数的取值范围,通过仿真计算得到各参数对固有频率的影响变化规律。
4.1 緩冲杆刚度系数
缓冲杆的刚度系数是系统重要的结构参数,根据式(22)可知,它直接影响系统的固有频率。由图6可以看出,当平台三个姿态角为零,平台没有偏置,处于初始位姿时,[x]轴和[y]轴方向的固有频率相同,6阶固有频率由4条曲线显示。随着缓冲杆的刚度(k)增加,六阶固有频率也呈正比递增;观察4条曲线的斜率可知,高阶固有频率要比低阶固有频率更加敏感,随着缓冲杆刚度的增加,六阶固有频率呈发散趋势。
4.2 上平台铰接点半径
一般情况下,下平台铰接点半径受安装空间和安装位置的限制,为方便分析,下面研究上、下平台铰接点半径比[ra/rb]对系统固有频率的影响,根据设计要求,将下平台铰接点半径固定为0.235 m,通过改变上、下平台半径比[ra/rb]来分析系统的六阶固有频率。如图7所示,低阶固有频率对上、下平台半径比变化更加敏感,且在上、下平台半径比为0.75左右时出现拐点,随着比例的增大,系统的固有频率呈分散趋势,拐点的出现为后续的参数优化提供了参考。
4.3 上、下平台外接圆近铰点夹角
由图8可知,随着上平台外接圆近铰点夹角的逐渐增大,六阶固有频率呈分散趋势,且绕[z]轴旋转方向的固有频率变化最大,其次是沿[x]轴和沿[y]轴方向的固有频率变化。由图9可知,下平台外接圆近铰点夹角的变化对系统六阶固有频率的影响趋势大致和上平台一样。总体来说,上、下平台外接圆近铰点夹角对系统六阶固有频率的影响并不大,但是在上、下平台质心高度一定的情况下,其直接反映了缓冲平台各根缓冲杆的倾斜程度和整体长度,所以人们在设计时也不能将其忽略。
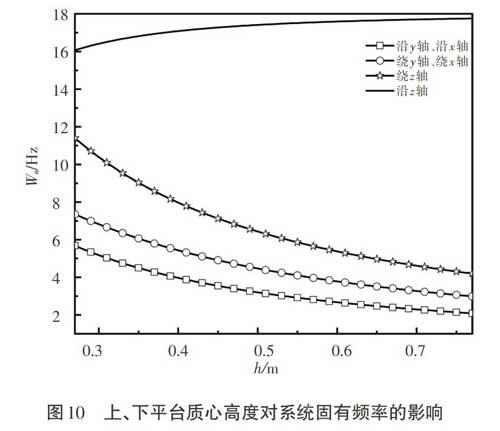
4.4 上、下平台质心高度
下面研究上、下平台质心高度对固有频率的影响,其实质是研究动平台位置变化对其的影响,因为当其高度改变时可以看作动平台沿[z]轴方向发生移动,位姿的变化必然使六阶固有频率发生变化,而且影响还比较大,但是在结构设计时可以将高度看作系统的固有结构参数。如图10所示,随着高度的逐渐增加,系统的六阶固有频率呈分散状态,其对沿[z]轴方向的固有频率影响最大,与其他五阶固有频率不同,随着高度的增加,沿[z]轴方向的固有频率呈递增趋势。
5 结论
为了使八杆并联缓冲平台具有良好的隔振性能,降低共振的发生率,本文对其广义质量矩阵、广义刚度矩阵与广义阻尼矩阵进行推导,通过广义固有频率数学模型分析了结构参数对系统固有频率的影响,并借助ADAMS软件进行验证。结果表明,缓冲杆刚度系数、上下平台质心距离、上平台铰接点半径与系统六阶固有频率成非线性关系,上、下平台外接圆近铰点夹角与六阶固有频率呈线性关系且影响较小,分析所得结果为此类多杆并联缓冲平台的优化设计提供理论指导。
参考文献:
[1]宋晓鑫.并联舰载稳定平台隔振系统机构学建模与分析[D].秦皇岛:燕山大学,2017:16-17.
[2]王旭,张嵘.惯性导航系统并联缓冲器动力学分析与仿真[J].中国惯性技术学报,2013(5):561-564.
[3]陈修龙,吴良凯,贾永皓.并联机器人弹性动力学[M].北京:中国电力出版社,2017:80.
[4]张春辉,汪玉,温肇东,等.被动式Stewart隔冲平台的刚度特性[J].振动·测试与诊断,2015(2):289-294.
[5]段楠.形状记忆合金在整星隔振系统中的应用研究[D].沈阳:沈阳航空航天大学,2016:20-21.
[6]AFZALI-FAR B,LIDSTROM P,NILSSON K.Parametric Damped Vibrations of Gough-Stewart Platforms for Symmetric Configurations[J].Mechanism and Machine Theory,2014(80):52-69.
猜你喜欢
振动工程学报(2022年2期)2022-05-14
科技资讯(2016年26期)2017-02-28
建筑科学与工程学报(2016年6期)2017-01-18
农机使用与维修(2016年10期)2016-11-10
建筑科学与工程学报(2016年4期)2016-07-28
科技视界(2016年16期)2016-06-29
筑路机械与施工机械化(2016年3期)2016-03-22
科技与创新(2015年17期)2015-09-11
计算机辅助工程(2012年5期)2012-11-21