
三维激光扫描技术在矿山地下采空区测量中的应用
2021-07-16 10:06杨亮亮
新疆有色金属 2021年4期
杨亮亮
(新疆亚克斯资源开发股份有限公司 哈密 839000)
0 引言
矿山地下采空区是由人工开采,在矿山区域内地下形成的暴露面积较大的空场,在地下受空间限制,空区黑暗不容易观察,采空区形成形状不规律。采空区由于施工生产放炮震动等影响,采空区容易发生塌陷,采空区暴露表面较大,有一定的空高等,一旦塌陷产生震动波对正在井下生产工作中的人员有危险,井下正在运行的相关精密设备设施也会受到损坏,给企业带来巨大的经济损失和人生安全重大隐患。因此,采用三维激光扫描仪探测测量采空区形状,具有实时性强、穿透性强、工作效率高等优势,通过三维激光扫描仪进行采空区测量获取采空区内三维坐标数据,点云数据量十分庞大,通过这些海量数据处理,使用软件建模,能够清晰完整的了解采空区内的形状、信息等。
1 三维激光扫描技术工作原理
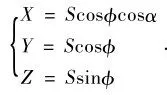
三维激光扫描仪主要由7个部件组成:发射器、接收器、时间计数器、滤光镜、控制电路板、微电脑及相关软件等组合而成。三维激光扫描仪主要利用了电子激光测距仪的原理,首先通过电子计量系统从发射激光信号到接受到反射信号的时间差计算出测量数据的目标与测量仪器之间的直线距离S,再根据仪器内部安装的测量计算系统获得激光的横向扫描角度观测值α和纵向扫描角度的观测值φ(如图1所示)。

图1 三维激光扫描工作原理
三维激光扫描仪在工程过程中所获取的点云数据会自动生成一个局部坐标系,该坐标系统是以三维激光扫描仪的定位中心坐标为点,并以扫描仪内部的坐标系统水平面设定X,Y 为轴,垂向方向设定为Z 轴。因此测量数据的目标点为相对坐标值(X,Y,Z),计算公式如下
2 矿山现状及面临的主要问题分析
随着国家的繁荣发展,矿产资源需求量越来越大,目前我国不少矿产正处在中长期发展阶段,矿区地表有建筑物、简易公路、矿石、废石场等基础设施,部分矿山经过多年的开采,地下已形成了很多采空区,有部分采空区已塌陷,环境治理不容乐观。矿山采空区如发生大面积塌陷,地表也就会随之发生塌陷、开裂等,就会导致地表生态坏境的严重破坏,于此同时塌陷就会造成井下空区内空气气压压缩,涌出冲击波,就会对周围的设施造成严重的破坏,若是井下有人正在施工开采作业,就会对人员造成严重的生命安全威胁。矿区在雨水较多地方,开采较长时间矿区,采空区内会形成有积水情况,出现采区塌陷事故,会对矿区造成严重的人员伤害和财产损失。
3 三维激光扫描技术在矿山地下采空区测量中的应用
随着测绘设备不断的在发展更新,无人机三维激光扫描仪技术在地下采空区测绘探索中具有很好的推广研究价值与前景应用,井下采空区空间较复杂,成形不规则,井下无GPS 信号等环境影响,井下无人机飞行工作时信息采集与定位、无人机自主避障系统、规划及航线规划、数据传输、无人机设备软件的研究、无人机智能控制等相关技术都还存在许多疑难问题及挑战。
(1)井下无人机挂载三维激光扫描仪数据采集、反馈与智能控制技术。井下无人机无法接收到GPS信号,只能依靠制导系统(IMU)对高精度惯性的飞行状态和飞行速度设备状态等进行定位,采集的数据精度也存在误差,无法满足无人机自主飞行智能控制系统,对采空区暴露面积大、深度较高的空区,无人机无法能实现自主飞行探测采空区。
(2)井下无人机挂载的三维激光扫描仪自主避障技术。目前,井下采空区传统测量不能满足生产需要,主要还是通过无人机挂载三维激光扫描仪或者普通三维激光扫描仪来进行采空区探测,三维扫描仪通过激光测距来实现自我避障功能,改变了方法虽然速度快、精度高,它适用于简单较规则的环境障碍,在面对井下无规则,突发障碍难以躲避时,容易发生撞机事故。在无法实现自主飞行功能时,主要还是依靠测量人员或无人机操作人员来手动操作完成三维激光扫描仪作业,由于受到采空区空间局限性影响,空区内粉尘较大、视线较差导致扫描探测工作时作业难度增大。因此,急需要攻克井下采空区复杂环境下的无人机自主避障技术,提高设备的安全性,降低操作难度。
(3)井下无人机的航线规划技术。目前无人机航线规划在地表已成熟应用,但是在井下由于受采空区空间复杂环境等信息的影响不能完全自主的规划航线,这对搭载无人机三维激光扫描仪的规划需进行研究。无人机在采空区内飞行作业过程中出现避障需要立即进行处理的任务或障碍物时,人为预设的全局路径规划难以及时控制无人机,这就对设备造成严重的损坏,为此目前急需要开展对采空区内航线规划需研究探讨。
(4)井下三维激光扫描仪数据稳定传输性能,井下无法接受到GPS信号,缺少信息验证,数据传输不稳定,使无人机搭载三维激光扫描仪能够在采空区内作业,能够安全高效的运行是关键。在数据传输过程中井下信号弱受环境的影响干扰等,距离传输受限制,采集的数据点云数据量大,为能实现长距离在复杂的坏境下数据稳定传输,在采空区内无人机能够自主安全高效的工作,实现采空区数据通讯稳定的传输和智能设备配套技术研究。
(5)采空区无人机搭载三维激光扫描仪智能控制、控制算法、环境感知等技术的研究。目前市场上无人机的视觉系统不是很成熟。针对井下采空区的复杂环境,三维激光扫描仪利用空间位置计算法、特征检测验证法、图像差分算法、智能优化探索算法等,来开展井下采空区作业过程中智能控制、实时环境感知等,能够完全自主的飞行规划探测测绘工作。
(6)井下无人机搭载三维激光扫描仪能力以及无人机续航时间。在采空区无人机三维激光扫描仪在工作中,无人机需要搭载三维激光扫描仪、光学CD传感器、配备红外摄像,机子本身自带的电池,这会使无人机的载重增加,在作业工程中,对无人机的飞行续航时间造成较大影响,在作业过程中因载重原因设备运行存在风险。因此,解决无人机搭载三维激光扫描仪的载重和延长续航作业是现在需解决的技术。
4 结语
本文主要针对目前矿山的生产现状面临的问题进行分析,提出无人机搭载三维激光扫描仪在矿山采空区的使用,无人机存在的缺陷需技术攻关问题,提出先进测绘设备代替传统测量方式,新的测量方法的优势,为解决矿山安全隐患提出了有效依据。为今后的矿山开采以及环境治理提供建议。
猜你喜欢
交通世界(2022年27期)2022-10-17
现代仪器与医疗(2022年2期)2022-08-11
有色金属(矿山部分)(2022年2期)2022-07-13
新疆钢铁(2021年1期)2021-10-14
神剑(2021年3期)2021-08-14
昆钢科技(2021年2期)2021-07-22
当代工人·精品C(2020年1期)2020-05-20
阳光(2020年5期)2020-05-06
建筑建材装饰(2017年7期)2017-07-04
中国动物保健(2015年4期)2015-10-21
