
基于MC9S12DG128 的智能竞速小车
2021-07-18 07:12贾玉凤
电子制作 2021年12期
贾玉凤
(济南职业学院,山东济南,250014)
1 设计背景
智能交通系统(ITS)方面的研究工作已经得到了世界上许多研究机构的关注,同时已经研发出了一些智能化的原型车辆,并进行了路面测试。汽车智能控制在无人驾驶、现代物流业及柔性制造、系统中都有广泛运用,车辆智能控制已成为人工智能领域的研究热点之一。本文所研究的智能车是一个良好的试验模型,为车辆无人驾驶、自动导向车提供了一个研究模型。
2 系统整体结构设计
文中设计方案的智能车可以在封闭式的跑道上独立循线运作,跑道表面为白色,中心有25mm 总宽的持续黑色引导线。作为可以鉴别路面情况、全自动管理决策运作的智能车能够当做一个全自动自动控制系统。系统模型框图如图1 所示。

图1 系统模型框图
智能车将检验到的路面信息和智能车姿势信息传递控制器,控制器开数据分析处理和管理决策,各自得到电动机的操纵量和舵机的操纵量,对驱动电机的转速比和转为舵机拐角加以控制,此外,根据速率检验模块,将电机额定功率(即智能车的速率)意见反馈给控制器,完成对智能车速率的闭环控制系统,以提升操纵的精密度。
为了更好地完成所述对智能车的操纵,智能车务必具有下列关键作用模块:①路面信息检验模块。完成对实时路况信息的检验,为控制器的管理决策出示根据。②控制器模块。分辨地面信息的情况,对转为舵机和驱动电机开展操纵。③为智能车出示驱动力的驱动电机模块和为智能车出示转为作用的舵机模块。④为了更好地对智能车的速率完成闭环控制系统要有限速模块,出示速率意见反馈数据信号。⑤电池管理模块。输出不同的额定电压值,为整车系统软件的每个模块供电系统。此外为了更好地调节的便捷也要有人机交互技术模块。
3 智能车系统的硬件开发
硬件配置系统软件是智能车精确、平稳运作的保障。挑选不一样的硬件配置电源电路及元器件,对系统的功能实现影响明显。虽然许多硬件配置、电源电路和元器件都能完成完全相同的作用,可是,针对不一样的系统来讲,实际的运行效果却大不一样,根据本文所研究智能车系统的功能要求,智能车硬件的总体架构设计如图2 所示。
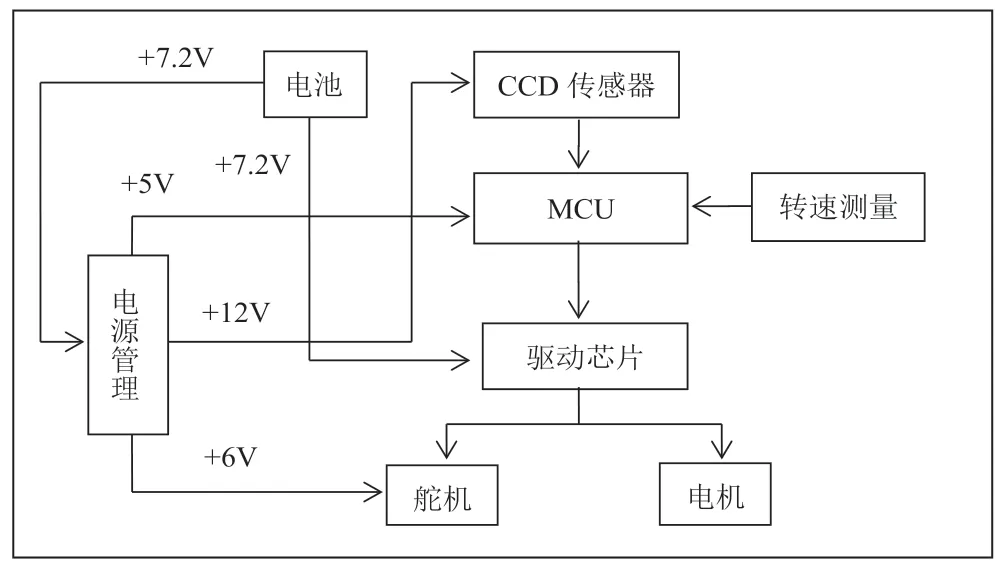
图2 系统硬件总体框图
本智能车硬件电路选择以MC9S12DGl28 单片机作为核心控制器,辅以时钟电路、电源电路、复位电路、BDM接口组成单片机最小应用控制系统。时钟电路采用的是标准的MC9S12 系列单片机的时钟电路。通过把一个16MHz 的外部晶振接在单片机的外部晶振输入接口EXTAL 和XTAL 上,然后利用MC9S12DGl28 内部的压控振荡器和锁相环(PLL)把这个频率提高到32MHz,作为单片机工作的内部总线时钟。电源电路主要是给单片机提供5V 工作电压。BDM 接口用于连接BDM 调试下载器,实现把调试编译好的程序代码下载到MC9S12DGl28 单片机芯片中。利用单片机所提供的专用引脚BKGD 来完成。
路面信息采集模块:本智能竞速小车采用LMl881 作为视频流同歩分离出来芯片,LMl88l 视频同歩数据信号分离出来芯片能够从视频流中获取数据信号的时钟频率信息,并将其转化成TTL 电平传输给单片机芯片进行处理。
单片机采集图像系统原理图如图3 所示,其中包括有MC9S12DGl28 单片机最小系统、同步分离电路、5V 稳压电路、12VMC34063 斩波升压电路等。
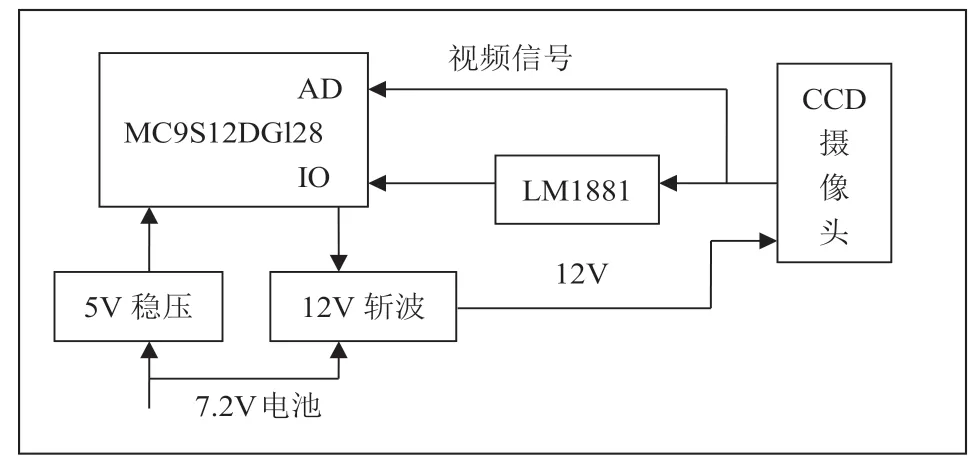
图3 单片机采集图像系统框图
其中MC9S12DGl28 单片机端口资源配置如下:AD 输入端口PAD00、PAD08 用来输入视频模拟信号;外部中断口IRQ 用来输入视频同步信号;CS 接单片机的PEl 口用来输出复合同步信号;VS 接单片机的PHl 口用来输出场同步信号。
直流电机驱动模块;驱动芯片用于驱动电机的运行、终止、加快、降速和制动系统。直流无刷电机的速度调整与操纵由单片机设计的PWM 信号来进行,驱动芯片选型选择了飞思卡尔半导体公司的半桥式驱动器MC33886。
采用一块MC33886 驱动电机,调速时MC33886 发热量会很大,这主要是因为在调速过程芯片内MOS 管通过大电流,使MC33886 发热量很大,导致MC33886 的FS 引脚置位,从而使其不工作,特别是在后期采用反向制动后这种情况更为严重,为了更好地提升驱动电源电路的驱动工作能力,本智能竞速小车的系统中采用两块MC33886 半桥式驱动器并联来驱动电机。使用两块MC33886 并联将堵转时通过电流的极限值提升了,在供电模块中需要合理的布线解决,以利于提高整个驱动系统的可靠性,在设计PCB 时还要为MC33886 需要添加散热盘以降低其工作时的温度。
速度检测模块:采用光电编码器对驱动轮后轮的转速比开展了实时测量,将检测到的速度反馈数据信号传递给MCU 核心控制单元模块,进而对直流无刷电机的转速动速度、加速减速开展精确迅速的调整。
本智能竞速小车系统中的测速采用光栅编码器,它每转动一圈都会输出一定个数的脉冲,通过在单位时间内测量得到的脉冲数,就可以得出电机的转速。光栅编码器由光栅盘和光栅式光电开关组成。光栅盘可以自己制作,光栅式光电开关为配对并集成的LED 管和光敏三极管。LED(发射端)的出射光照射到一小段距离之外的光敏三极管(接收端)上,传感器的状态随出射光是否被遮挡而改变。使用施密特触发器后,可将所得信号直接送给单片机,由单片机对其计数,进而算出小车的速度。
开关电源模块:所有硬件配置电源电路的开关电源由7.2V、1.8A/h 的充电电池Ni-Cd 充电电池转换输出。后胎驱动电机由7.2V 开关电源立即供电系统;应用6VDC-DC芯片将7.2V 开关电源电压转换成6V 电压对舵机驱动模块供电;根据DC-DC 芯片将7.2V 工作电压转化成5V,提供给单片机设计、限速模块和键盘显示模块;通过12VDC—DC 芯片升压后对CCD 摄像头提供12V 的供电电压。
4 智能车系统软件设计
对智能车的运行控制主要是通过对小车的速度与行进方向进行不断调整来实现的,经典的PID 控制算法简单、且计算机比较容易实现,但PID 控制算法其参数的准确整定不好实现,而模糊控制算法恰恰能够弥补了这一缺陷,综合应用模糊控制和PID 控制的优缺点,因此选用模糊PID控制算法来控制小车速度和舵机转角。MC9S12DG128 芯片的内部所自带的模糊推理机为模糊控制的实现带来了极大方便。对于舵机的控制方案和上述方法类似,所不同的是,由于对舵机转角的检测比较困难,无法得到反馈量,因此对舵机的转角采用的是开环模糊PID 控制。
图像采集采用的摄像头为JK007B,其像素为625X 582,对于提取道路信息来说分辨率不需要太高,因此每场采集15 行,每行采集50 个点(实际为采用每隔40 行采集一行,每隔10 点采集一点),需要注意的是摄像头在安装时需要旋转90 度后进行安装。图像信号采集之后对其进行处理,提取出其中的黑线位置,对于黑线的提取选用的是阈值法的改进算法—动态阈值法。
5 小结
本智能车.从总体上对整个系统进行了相关论述,说明了系统的主要构成模块功能及了具体硬件电路。根据智能车功能特性,采用了面阵CCD 摄像头作为道路信息检测元件,分析设计了信息采集、图像处理的算法,采用动态阈值法对图像信息进行黑线提取,大大提高了图像处理的准确性。结合MC9S12DG128 单片机具有模糊推理机的特点,设计了模糊PID 控制器,对模糊控制器的模糊化、模糊推理、反模糊化步骤进行了详细的分析,并将其成功应用于对PID调节器的参数自整定,实现了对智能车的模糊PID 控制。
猜你喜欢
舰船科学技术(2022年11期)2022-07-15
中国自行车(2022年3期)2022-06-30
成都信息工程大学学报(2022年2期)2022-06-14
网络空间安全(2019年8期)2019-03-18
航空模型(2016年5期)2016-07-25
航空模型(2016年5期)2016-07-25
航空模型(2015年6期)2015-10-21
中国机械(2014年23期)2014-10-21
中国信息技术教育(2014年5期)2014-03-17
科技传播(2012年10期)2012-06-06
