
工业机器人计算机仿真与生产线使用对比分析
2021-07-19 00:24周立求赵永豪安娟牟海荣
电脑知识与技术 2021年13期
周立求 赵永豪 安娟 牟海荣

摘要:以工业机器人搬运生产线为研究对象, 提出了用RobotStudio软件中的Smart组件功能对搬运工作站進行仿真的设计方案。创建了动态输送链、动态夹具的Smart组件,实现了一台ABB机器人搬运生产线的仿真设计,获得了较好的动画效果。对仿真中的各种处理措施和生产实际中采取的措施进行了对比分析,从而帮助从事相关工作的技术人员更快地掌握工业机器人仿真技术和实际生产线设计工作。
关键词:工业机器人;RobotStudio;Smart组件;仿真
中图分类号:TP165 文献标识码:A
文章编号:1009-3044(2021)13-0261-03
Abstract: Analysis compares and contrasts the computer simulation of ABB RobotStudio software with the ABB carrying robot in real working environment. This computer simulation is built with Smart Component which comes from RobotStudio software. An excellent animation reflects each step and motion of the ABB carrying robot on assembly line. The objective of this analysis is to help technicians in this field to study and work on ABB carrying robot quickly and easily.
Key words: Industrial Robot;RobotStudio; Smart Components; Simulation
1前言
工业机器人计算机仿真是为适应制造业的智能化、数字化和网络化的发展要求[1],通过机器人技术与计算机技术结合,在工业机器人投入到产品制造与生产线使用之前模拟出实物,从而合理配置生产线,提高工作效率[2]。
ABB公司的RobotStudio是最优秀的工业机器人仿真软件之一。建模时,RobotStudio可导入各种主流CAD格式的数据,有效地完善了RobotStudio的造型功能[3],从而方便地建立与生产线一致的模型。设计的机器人程序无需任何转换便可通过在线功能直接下载到实际机器人系统运行。邱雪松等[4]建立了冲压生产线的虚拟样机模型。陆叶[5]分析了机床上下料工作站。而目前生产线大多是多机器人自动线[6]。徐光[7]通过对比MATLAB与RobotStudio软件中机器人模型,对角矢量差进行修正,方春林[8]实现了一个机器人开发平台的可视化开发环境。王功亮等研究了RobotStudio在输送链跟踪中的实际应用,提出了机器人启动窗口宽度和产品输送链速度对产品拾取率的影响分析[9]。郝建豹等研究了设计适应箱柜等狭窄空间工作的机器人的可行性[10]。这些方法都较为复杂,难以做到虚拟与现实的无缝衔接。
本文对仿真中的各种处理措施和生产实际中采取的措施进行对比分析,从而帮助从事相关工作的技术人员更快地掌握工业机器人仿真技术和实际生产线设计工作。
2 搬运机器人工作站的建模与布局
本项目选用ABB公司的IRB4600机器人,主要用于机床上下料、产品的搬运、组装等作业。
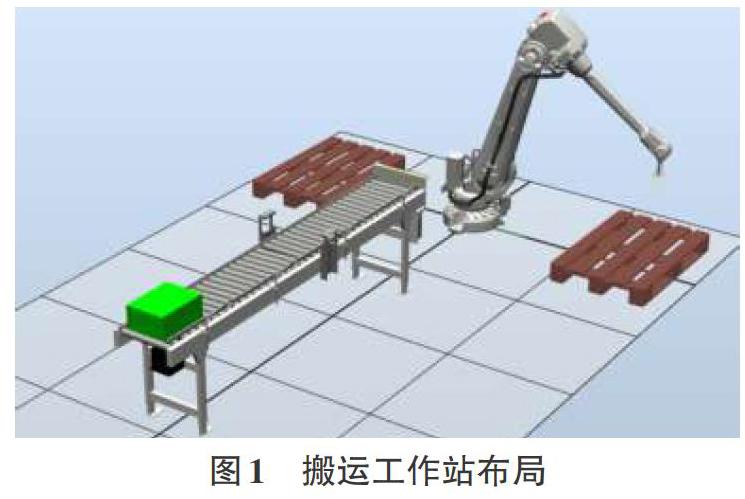
建模时,先建一个空工作站,再从ABB模型库导入机器人本体,依次从模型库导入吸盘、左右垛板、输送链。从几何体中导入产品模型,工作站模型布局如图1所示。在完成了布局后,要建立机器人系统,建立虚拟的控制器来完成相关的仿真操作。
所建工作站模型与实际工业机器人搬运情况对应。其工作过程是: 当输送链将产品移送到末端,传感器开始检测到产品;触发信号使机器人带抓取工具(吸盘)运动到抓取位置;工具抓取产品后,把产品放到垛板上。当产品被搬离输送链,又会生成新的产品向输送链末端运行。
3 Smart 组件的设计
用RobotStudio软件自带的Smart组件,能实现产品在输送链上运动、机器人工具抓取产品、机器人搬运产品到垛板等动作。用Smart组件仿真的动画效果好,仿真质量高。
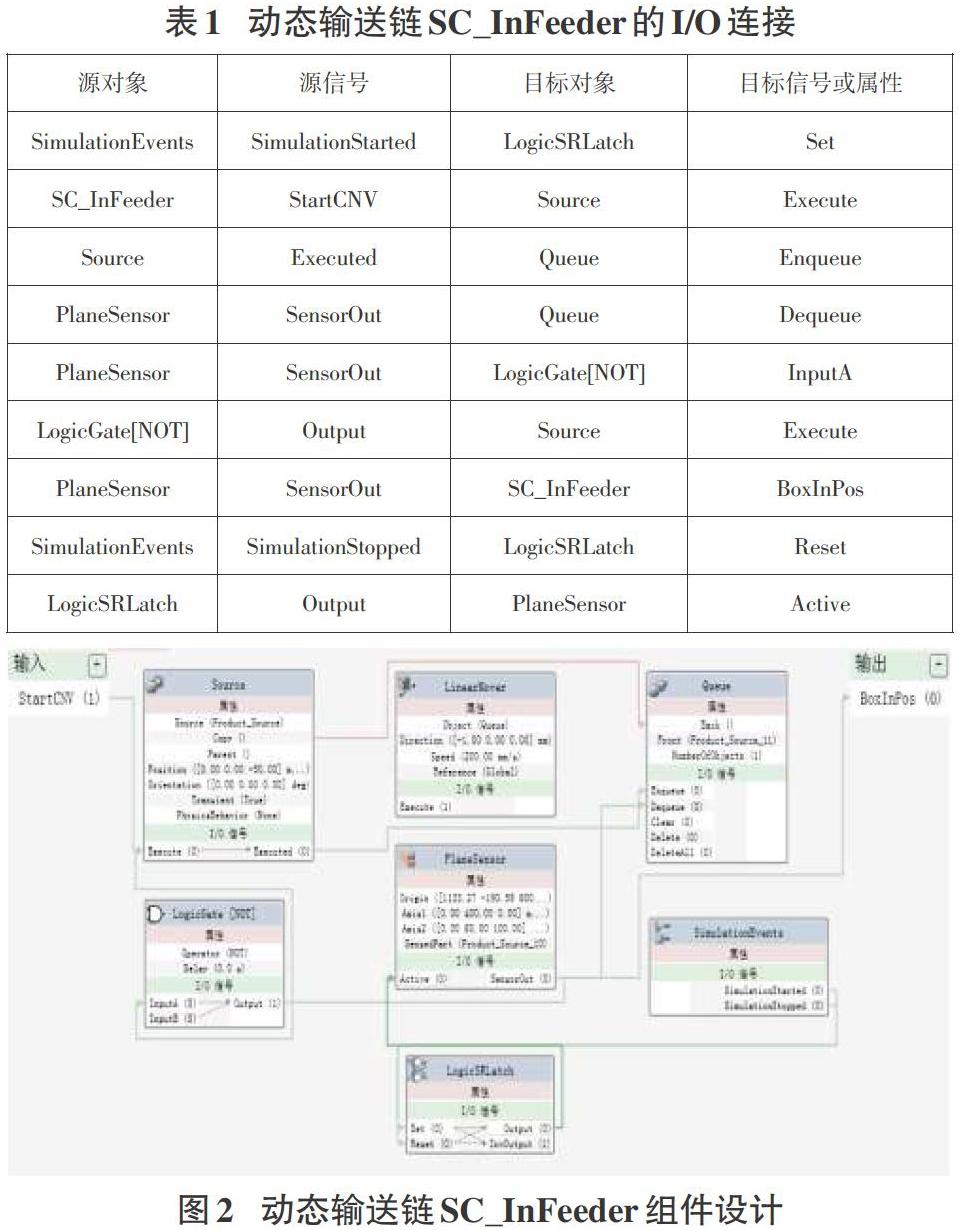
3.1用Smart 组件构建动态输送链SC_InFeeder
动态输送链SC_InFeeder由五个子组件构成。Source的作用是创建一个图形组件(产品)的拷贝,LinearMover的作用是使对象(产品)沿着一条直线移动,Queue表示对象(产品)是一个队列(即不是唯一的),PlaneSensor监测对象(产品)是否与末端平面相交。SinulatlonEvents是仿真开始和停止时发出的脉冲信号(用于对传感器置位和复位),增加一个LogicSRLatch锁定信号(因为SinulatlonEvents是脉冲信号)。用LogicGate[NOT]进行数字信号的非逻辑运算,利用PlaneSensor的下降沿使Source产生新的拷贝。
将动态输送链SC_InFeeder各子组件建立属性连结,设计逻辑如图2 所示。diStart和doBoxInPos与各子组件信号,需要创建连接关系,如表1所示。
3.2 用Smart 组件构建动态夹具SC_Tool
动态夹具SC_Tool的Smart组件由Attacher、Detacher、LineSensor、LogicGate[NOT]和LogicSRLatch锁定信号五个子对象组件构成。Attacher是安装一个对象(抓取产品),Detacher拆除一个对象(释放产品),LineSensor是检测夹具是否抓取产品。LineSensor检测到的产品作为Attacher安装和Detacher拆除的子对象,这样就解决了安装和拆除的对象不是唯一的问题。拆除的操作要用到LineSensor的下降沿,所以将LogicGate 属性中的Operator设为NOT。LineSensor的上升沿和下降沿都是脉冲信号,这里也要用到LogicSRLatch锁定信号,如图3。
动态夹具SC_Tool的I/O连接关系如表2所示。Attacher信号使LogicSRLatch鎖定信号置位,Detacher使LogicSRLatch锁定信号复位。LogicSRLatch用于启动工具的真空吸盘。
4工作站I/O 信号设计和仿真动画
工作站系统中的I/O信号和两个动态组件的I/O信号之间的设计逻辑如图4 所示。
机器人系统的dotGripper抓取输出信号用来启动工具系统的Grip抓取信号,机器人系统的输出信号doStartCNV用来启动输送链系统的StartCNV信号。工具系统的抓取检测信号VacuumOK去控制机器人系统的diVacuumOK真空检测输入信号,输送链系统的BoxInPos产品到位输出信号去控制机器人的diBoxInPos产品到位输入信号。工作站系统I/O信号见表3。
根据以上设计, 实现的搬运工作站仿真动画截图如图5所示。
5仿真信号处理方式与生产实际中的应用方式对比分析
用RobotStudio中的Smart组件对工业机器人生产过程进行仿真,动画效果流畅、逼真。但毕竟仿真不是生产中使用的实际设备,产生的动作和信号都不相同,现对仿真中动作和信号的处理方式与生产实际中应用的方式进行对比分析。
生产实际中,输送链是通过电机拖动的,仿真中则是用子组件LinearMover。产品到达输送链末端需要停下来,生产实际中是通过感应式或光电式传感器检测产品是否到位,这个传感器是不能被输送链感应或遮挡的。仿真中也要用到面传感器来检测产品是否到位,只要将输送链设置为不被传感器检测就行。在工具的使用方面,生产实际中是通过气动夹住(松开)或吸附(释放)产品,仿真中则是用Attacher安装和Detacher拆除子组件的方式实现。和生产实际中类似,用线传感器LineSensor检测到的产品作为Attacher安装和Detacher拆除的子对象,解决了安装和拆除的是不同对象(产品)的问题。
生产实际中,传感器不存在担心检测的是同一产品的问题。仿真中也可以做到,但要注意属性设置:队列中,因复制品不是唯一的,所以Back属性不能设置;输送链中的面传感器,因为监测的部件不是唯一的,属性SensedPart不能设置;工具中,线传感器检测的部件不是唯一的,属性SensedPart也不能设置。
6结束语
用Smart组件对工业机器人生产过程进行仿真设计,可以产生非常好的仿真动画效果。本文使用Smart组件,通过I/O控制的方式,对使用最广泛的搬运机器人,包括产品在输送链上的运动、工具的动作和机器人的搬运动作进行仿真,并对仿真中为产生与实际应用相同效果而采取的各种处理措施和实际生产中采取的处理措施进行了对比分析,从而可帮助从事仿真和设计实际生产线的技术人员更快地掌握工业机器人仿真技术和实际生产线设计工作。
参考文献:
[1] 郝建豹,许焕彬,林炯南.基于RobotStudio的多机器人柔性制造生产线虚拟仿真设计[J].机床与液压,2018,46(11):54-57,81.
[2] 郝翠霞,叶晖.基于Smart组件的工业机器人码垛仿真设计[J].自动化技术与应用,2018,37(8):63-66.
[3] 孙立新,高菲菲,王传龙,等.基于RobotStudio的机器人分拣工作站仿真设计[J].机床与液压,2019,47(21):29-33.
[4] 邱雪松,肖超,谭候金,等.大型机器人冲压生产线多软件联合仿真[J].中国机械工程,2016,27(6):772-777.
[5] 陆叶.基于RobotStudio的机器人柔性制造生产线的仿真设计[J].组合机床与自动化加工技术,2016(6):157-160.
[6] 程智勇,李晓娟,陈华龙,等.基于FANUC0iTD和GSK工业机器人柔性制造单元的设计[J].机床与液压,2014,42(21):97-100.
[7] 徐光.水槽自动化抛光系统及机器人路径规划研究[D].广州:广东工业大学,2016.
[8] 方春林.机器人模块可视化组装开发环境的设计与实现[D].广州:华南理工大学,2017.
[9] 王功亮,王好臣,李振雨,等.基于RobotStudio的工业机器人输送链跟踪仿真[J].机械设计与制造,2019(11):231-234.
[10] 郝建豹,宋春华.基于MATLAB和RobotStudio的6-DOF机器人运动学分析与仿真[J].机械设计与制造,2018(2):238-241.
【通联编辑:梁书】
猜你喜欢
科技创新与应用(2016年34期)2016-12-23
汽车科技(2016年6期)2016-12-19
科技资讯(2016年18期)2016-11-15
