多波段伪码调制连续波测高系统
2021-07-20 08:57赵宗兵霍力君
探测与控制学报 2021年3期
赵宗兵,霍力君,李 晓
(中国空空导弹研究院,河南 洛阳 471000)
0 引言
自然环境对空空导弹影响很大,主要体现在太阳、云背景、地海背景和复杂气候等方面[1],特别是执行近地、近海攻击突防任务时空空导弹工作在低空或者超低空、快速机动、大范围的严酷条件下[2],导弹需要根据高度信息进行飞行姿态控制以保证导弹的稳定和良好的动态品质,飞控系统需要根据高度信息调整导弹擦地角以防止地海杂波和多径效应导致导引头测量精度的下降,引战系统也需要根据高度信息调整截止距离等状态参数[3],因此高度的精准测量可以大大提高空空导弹的生存能力和作战效能。
空空导弹主要依靠捷联惯导加卫星导航定位系统得到其高度信息。导航定位系统测高误差大,同时容易受到环境的影响,抗干扰能力较弱。惯性导航自主性强、不易受环境影响,但是其自身无法长时间稳定工作,误差较大,在进行高度测量时必须与无线电高度表等配合使用[4],而目前空空导弹并没有装备无线电高度表,从而严重制约了空空导弹的使用范围。
无线电高度表测量相对于地面(或海面)的真实高度(绝对高度),精度较高,响应较迅速。常规无线电高度表主要有恒定周期调频连续波、恒差拍频调频连续波、脉冲调制式三种,但是这三种高度表抗干扰能力较弱,易受转发式等干扰模式的影响[5]。
在兼顾测高精度和抗干扰能力的前提下,提出采用多波段伪码调制连续波复合体制测高系统来实现空空导弹的高度测量。
1 m序列伪随机码测距原理
扩频是指用来传输信息的信号带宽远远大于信息本身带宽的一种传输方式,频带的扩展由特定的信息编码来实现,在接收端用同步接收实现解扩和数据恢复。实现扩频的方式有多种,包括直接序列扩频、跳频、跳时、线性调频以及它们的混合方式[6]。
直接序列扩频常采用伪随机序列(PN码)进行调制以实现频谱的扩展,m序列为常用的PN码,其自相关数值大,互相关数值小,具有近似噪声的频谱。
m序列是一种二元伪随机序列,具有平衡性、移位可加性等诸多优点,可以由线性反馈移位寄存器(LFSR)生成[7],m序列生成示意图如图1所示。
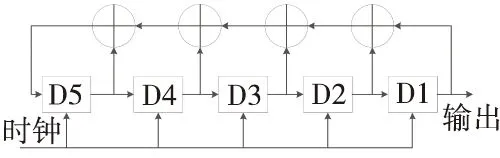
图1 m序列生成器Fig.1 Generator of m-sequence
M位m序列的周期自相关函数为:
(1)
脉宽10 ns、4 095位一周期m序列的自相关函数如图2所示,图中当m序列完全相关时输出最大,这就是m序列伪随机码的测距原理。

图2 m序列自相关函数Fig.2 Autocorrelation function of m-sequence
2 多波段伪码调制测高系统
由于主要应用场景为海面上空,常见云、雨、雾等天气,同时考虑系统的抗干扰性能,故采用C+X的双波段,其中C波段应用于高高度(100~800 m)的测量,X波段应用于低高度(5~150 m)的测量,以兼顾导弹总体、导引系统和引战系统的测高需求,为防止系统进入死锁状态两波段测高高度有重合。
为最大限度发挥其抗干扰能力,系统采用m序列伪随机码调制、相关检测、中频数字化、瞬时跳频和发射功率管理等技术[8-12],其由天馈单元、双源收发组件、信号处理机等组成,系统功能框图如图3所示。
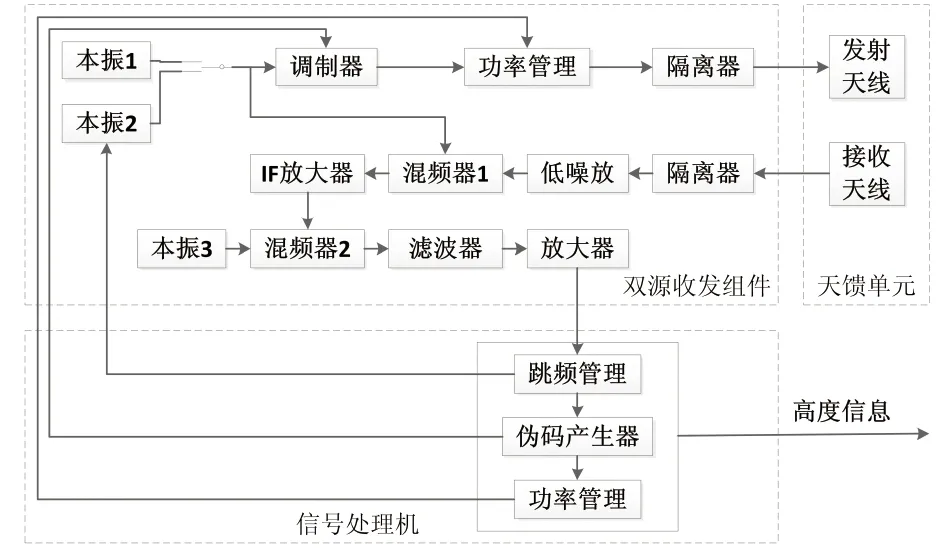
图3 系统功能框图Fig.3 Functional framework of system
系统各部分的组成和功能如下:
1)天馈单元由发射天线、接收天线及馈电电缆等组成,主要完成信号的发射和接收;
2)双源收发组件由本振1、本振2、本振3、发射支路、接收支路等组成,主要完成射频信号的产生、调制、功率管理和接收混频等;
3)信号处理机主要由FPGA组成,其产生跳频信号控制本振1或本振2,产生m序列伪随机码对发射信号进行调制,产生功率管理信号进行发射信号的功率控制,对待处理信号进行检测生成高度信息等。
2.1 跳频管理
m序列调制的扩频增益越大,系统的抗干扰能力就越强,系统的性能就越好,但是要求系统的定时和同步在码元的几分之一内建立,对系统硬件要求较高,此时可采用跳频技术来弥补其不足。
信号的载频按一定的规律伪随机跳变,可用跳频图案示意,某一时间段内跳频图案如图4所示。
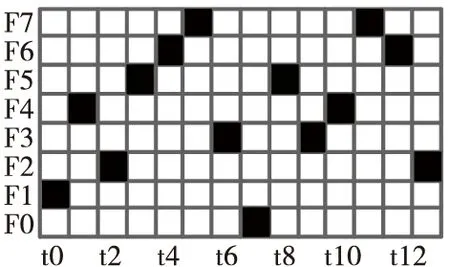
图4 跳频示意图Fig.4 Diagram of frequency hopping
RS码作为自纠错码,可以校正随机错误,也可以校正突发错误,有多种实现方式,包括查表、基于DSP电路、基于ASIC、基于FPGA等方法[13-15],它们各有其使用范围。
C波段和X波段带宽都为1 GHz,分别选取其中8个频率点,每个相邻频率点相差80 MHz,跳频序列为查表法产生的3阶RS编码,如图5所示。

图5 RS编码序列Fig.5 RS code sequences
为了获得更良好的抗干扰性能,一个m序列周期包含8段RS编码序列,即跳频周期5.85 μs,每段RS编码序列包含7个载频频率,此时第一级混频器频率按相应的规律变化,且跳频周期一致。
2.2 多路捕获
多普勒频率范围决定了捕获系统的路数,以及每一路的检测带宽和主要性能指标,是进行接收机设计的前提。按照式(2)所示多普勒频率计算公式,可计算出空空导弹在飞行过程中的最大和最小多普勒频率分布情况。
(2)
式(2)中,υ为导弹最大速度,λ为波长(取最短工作波长),θ为综合考虑导弹运动姿态和天线波束时导弹速度和天线波束宽度处的夹角60°~120°。不同夹角下多普勒频率范围如图6所示。
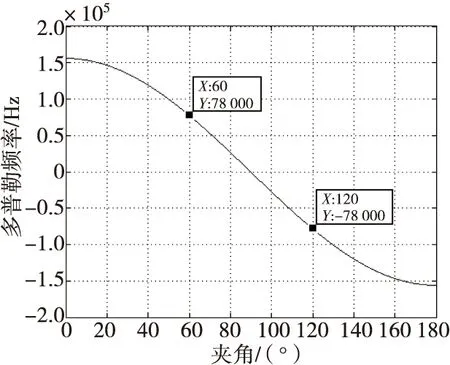
图6 多普勒频率Fig.6 Doppler frequency
在导弹不同的飞行姿态下,海面回波的多普勒频率范围大概为-78~78 kHz,即使考虑最严酷的飞行情况,信号处理机中设置20路捕获系统即可满足的要求。
2.3 高度检测
对高度的检测就是对m序列移位自相关捕获,由于海面为面目标,回波为多回波,且每个回波的多普勒频率不一致,故需采用多路捕获系统实现高度检测,其中每一个支路都采用I/Q两路相关正交处理,具体如图7和图8所示。
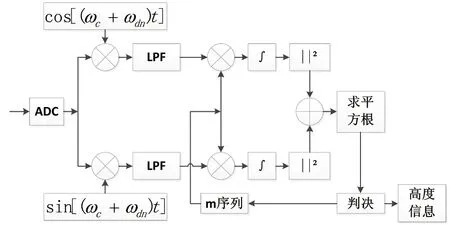
图7 1路捕获系统Fig.7 Capture system of one branch
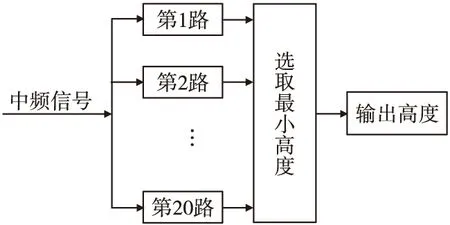
图8 多路捕获系统Fig.8 Capture system of branches
m序列多路捕获系统检测得到的最小高度即为待测高度。
3 仿真验证
3.1 系统误差
m序列检测门限VT由虚警概率Pfa和检测概率Pd决定,并影响系统最终测高误差。
假设m序列右移j后所得高度为真实值,而当前测试高度值为m序列右移i所得,
1)i 概率为: Perror1=(1-Pfa)i-1Pfa (3) 测高误差: (4) 2)i>j 概率为: Perror2=(1-Pfa)i-2(1-Pd)Pfa (5) 测高误差: (6) 3)所有码元处的幅度均为超过门限,概率为: Perror3=(1-Pfa)M-1(1-Pd) (7) 这种情况下无法测得高度值,可将上一次高度值返回,并以此来估计误差。 综合以上三种情况总的平均误差为: (8) 由于Pfa和Pd相互独立,利用Matlab可通过二维搜索的方式,得到不同距离处的误差如表1、表2、表3所示。 表1 5 m处误差Tab.1 Error of 5 m 表2 100 m处误差Tab.2 Error of 100 m 表3 800 m处误差Tab.3 Error of 800 m 由上表选取Pd=0.95,Pfa=10-6即可满足系统测高误差要求。 码元10 ns、4 095位m序列模糊函数图如图9所示。m序列调制信号的模糊函数图是单峰图钉型的,说明其具有良好的距离、速度分辨率,同时具有良好的低截获抗干扰性能。 图9 m序列模糊函数图Fig.9 Ambiguity diagram of m sequence 4 095位m序列调制的扩频增益为: (9) 式(9)说明要保持同样的探测高度,m序列调制的发射功率比未调制的发射功率低33 dB,因此抗干扰能力大大增强。 考虑到多回波造成的旁瓣和虚警,扩频增益在实际应用中会有所降低,但降低的幅度不大。 m序列调制对窄带干扰的抑制作用在于接收机对目标回波信号解扩的同时,对窄带干扰信号的扩频,从而降低干扰信号的功率谱密度,扩频增益越大对各种干扰的抑制作用越好。频谱无限宽的噪声(如热噪声等)和宽带干扰信号与本地伪码不相关,无法解扩仍为宽频谱,用窄带滤波器就可以排除窄带以外的干扰从而实现带内信噪比的提高。 8频点瞬时跳频的扩频增益为: GH=10lg8=9 dB (10) 跳频系统利用跳频序列的随机性和为数众多的频率点,使得它和干扰信号的频率发生冲突的概率大大减小,偶尔的频率点受到干扰并不会给系统带来致命的影响,特别是瞬时跳频系统,所传输的码元在多个频率点上,受到的影响更小。 在捷联惯导加卫星导航定位系统测高的基础上,当空空导弹位于距离海面800 m高度以内时多波段伪码调制测高系统开机,否则关机,以增加测高系统的反侦察能力。 对于较具威胁的转发式干扰: 1)m序列伪随机码调制信号发射功率低,类似噪声,很难被侦测; 2)由于m序列伪随机码的单峰图钉属性,转发式干扰很难从空中进入天线副瓣进而干扰系统; 3)当转发式干扰从海面或地面进入天线主瓣进而干扰系统时,其相对正常的海面回波必有延时,而系统仅检测最短距离海面回波(即最小延时目标回波),干扰不会影响正常的测高功能; 4)码元宽度10 ns、4 095位m序列共有24 095种状态,一个完整循环的时间为40 950×24 095ns,而空空导弹的最大飞行时间为450 s左右,相对于m序列一个完整循环的时间可以忽略,即在空空导弹的整个飞行过程中,回波的m序列是唯一的,系统仅检测相对于发射m序列最大延时5.34 μs(对应800 m)内的回波,其余舍弃; 5)在系统正常工作过程中采用周期为5.85 μs的8频点瞬时跳频功能以规避可能的干扰,当系统受到干扰时立即实施跳频。 因此转发式干扰不会对系统构成威胁。 本系统和国内外其他的测高系统的性能对比见表4所示。 表4 性能对比Tab.4 performance comparison 和常规的高度表相比,系统数据刷新率、测高精度、抗干扰能力大大提高,测高误差可达±0.15 m,最大误差为±1.5 m,系统采用多种方式对抗干扰,特别是具有较大威胁的转发式干扰。 本文提出了多波段伪码调制连续波测高系统。该系统采用C波段1 GHz带宽加X波段1 GHz带宽的双波段、4 095位码元宽度10 ns的m序列伪随机码调制,8频点频率间隔80 MHz的RS编码瞬时跳频的连续波复合体制来实现空空导弹的高度测量。仿真分析结果表明其测高精度高,在800 m测高范围内最大测高误差为±1.5 m,抗干扰能力特别是抗转发式干扰能力大大提高,能够满足空空导弹的测高需求,扩大空空导弹的使用范围。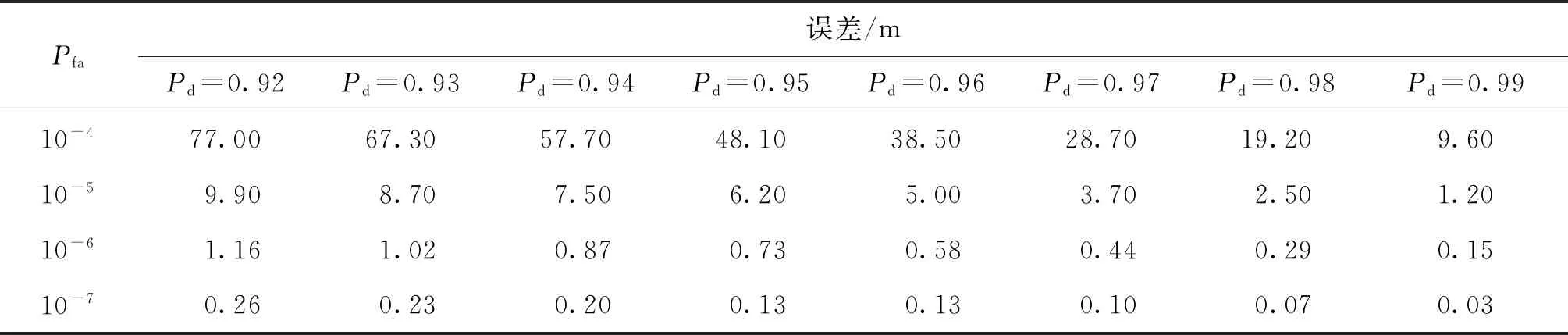
3.2 抗干扰性能
3.3 性能对比
4 结论
猜你喜欢
九江学院学报(自然科学版)(2022年2期)2022-07-02
航天返回与遥感(2022年2期)2022-05-12
波谱学杂志(2022年1期)2022-03-15
北京航空航天大学学报(2021年9期)2021-11-02
华北理工大学学报(自然科学版)(2021年3期)2021-07-03
文萃报·周二版(2019年28期)2019-10-21
智富时代(2018年5期)2018-07-18
智富时代(2018年5期)2018-07-18
现代兵器(2017年5期)2017-06-01
中学生数理化·七年级数学人教版(2016年6期)2016-05-14