基于嵌入式系统的起重机倾角检测装置
2021-07-21 13:01顾雯雯
起重运输机械 2021年13期
顾雯雯 王 丹
南京市特种设备安全监督检验研究院 南京 210019
0 引言
起重机械在建筑运输领域起着重要的作用,主要用于在一定范围内垂直提升和水平搬运重物。由于吊臂与起重机主枝处为支点连接,当出现超载作业、基础不稳等情况下在支点上会产生较大力矩,故起重机倾覆事故时有发生,从而带来严重的人员伤亡后果[1]。本文设计了一种基于嵌入式的高精度双轴倾角传感器智能监控系统,以解决该问题。
该装置在硬件设计方面以处理器STM32F103为核心,选取的高精度倾角传感器SCA100T-D01最高精度可达0.001°,工作量程为±30°,操作温度为-40℃~125℃[2]。考虑到起重机为室外作业机械,在对检测数据处理时增加了温度补偿算法,从而可提高测量值的准确性。在软件设计方面主要为处理器移植实时操作系统FreeRTOS,以便进行数据的处理和管理系统各硬件资源,最终采用RS485通信模式实现数据与控制指令的传输,当起重机吊臂倾斜角超过预设值时,装置会及时报警并提醒操作人员,从而能有效预防起重机覆事故的发生。
1 系统硬件模块设计
系统主要由负责倾角检测的传感器模块,负责进行数据处理的处理器模块和数据通信传输模块等组成。总体结构如图1所示。

图1 系统硬件总体结构图
本装置选用的倾角传感器SCA100T-D01是SCA100T系列中基于3D-MEMS技术的传感器,具有体积小、采集数据分辨率高和稳定性好的特点。在数据传输方式上,该传感器可通过自带的SPI接口输出采集的数字量,通过该方式可使后期的数据处理过程更为方便[2]。除此之外,该传感器还可通过自带的串口OUT_1、OUT_2与处理器进行串口通信,将传感器采集的模拟量进行串口传输,本设计中,传感器与处理器之间的硬件连接如图2所示,考虑到起重机室外作业受温度影响较大的特点,因此选用串口传输方式进行倾角采集数据的输出,该方式需要在处理器STM32F103处理器内进行 24 位的 A/ D 转换,再利用芯片内部集成的温度传感器,将测得的温度值则通过 SPI 接口输出数字量给处理器,因此可在数据处理时再进行温度补偿计算,从而进一步提高倾角测量的精确,最后将补偿后的角度值通过 RS485 串行通信。
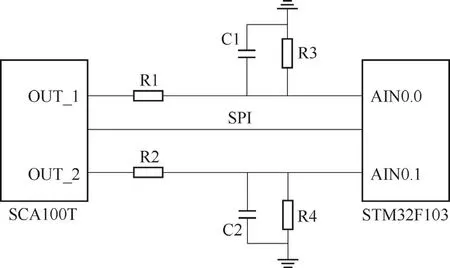
图2 传感器与处理器硬件连接图
1.1 处理器模块
本设计选用STM32F103 芯片是由ST公司生产的基于Cortex-M3 架构的具有高性能、高集成度、低功耗的微控制器产品,工作频率最高可达 72 MHz、并具有 32 位的 CPU、512 k字节的 Flash 存储器和 64 k 的SRAM,除此之外芯片还集成定时器Timer、CAN、ADC、SPI、I2C、USB和UART等多种外设功能[4]。本装置会用到其高速、全双工、同步的 SPI 协议,在SPI通信时传感器作为主设备,通过片选CS端来使能从设备,利用MOSI、MISO 和 SCK 3 根线来进行数据传输,传感器的温度数据寄存器是 150 μs更新 1 次,因此处理器则必须至少每隔 150 μs向传感器发送 1 次读写寄存器指令,传输的数据格式为 MSB(高位)在前LSB(低位)在后。
1.2 RS485串口通信
RS485协议采用平衡驱动器和差分接收器组合的形式,不仅数据传输抗干扰能力强,而且其传输速率相对于RS232协议也更快,更符合起重机工业倾角检测领域[3]。本设计在该协议硬件上选择低功耗收发器MAX3483E模块,该模块设计简单、稳定性好、可实现最高为250 kB/ s 的无差错数据传输,通过串口通信实现与处理器STM32F103的连接。
RS485 串行通信角度输出选用16进制代码双极性方式输出,数据长度为7个字节,其中Byte1和Byte2为起始位,Byte3和Byte4 为X轴数值,Byte5和Byte 6为Y轴值,Byte3和Byte5 分别为输出数据的高 8 位,Byte4和Byte6分别为输出数据的高 8 位,Byte7为校验位,输出命令格式如表1所示。
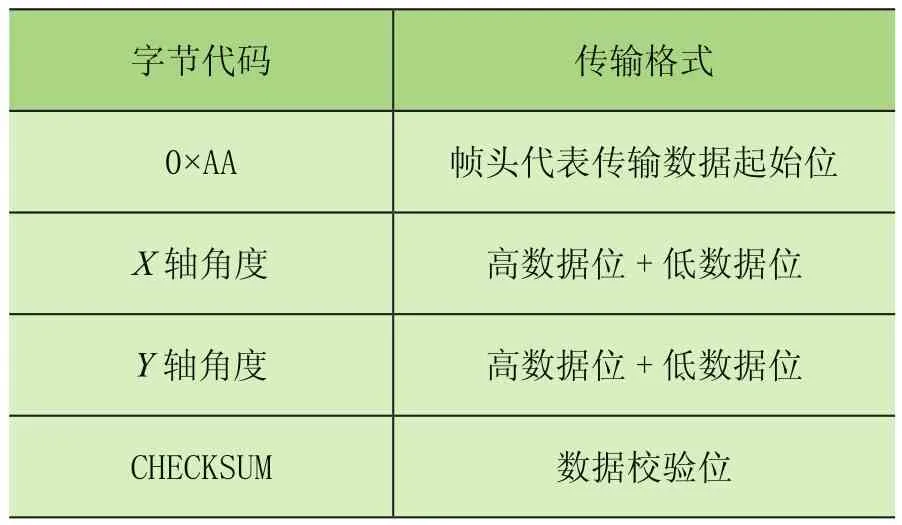
表1 传输数据输出格式
2 系统软件设计
2.1 角度测量 A/ D 数据转换公式
在处理器内部将采集到的模拟量转化为角度

式中:Vout为传感器输出的模拟量,V0°为传感器在倾角为0°时输出的电压值(2.5 V),Sensitivity为传感器的灵敏度(SCA100T-D01为4 v/g)。
当传感器的采集角度接近0°时,则可以采用简化式进行计算

式中:Sensitivity取70 mV/°。
2.2 SPI总线温度值读取方法
在用四线同步串口SPI读取温度数据时,处理器STM32F103作为主设备,负责提供时钟,并通过片选端CSB来控制通信的通断,而从设备SCA100T通过串行时钟端口SCK来接收主设备提供的SPI时钟,采集数据则是通过三线接口来传输,分别是串行数据输入线MOSI、串行数据输出线MISO和串行时钟SCK。传感器SCA100T的温度数据寄存器为150 μs更新一次,因此处理器则必须至少每隔150 μs发送一次读写寄存器指令,具体流程为:在STM32F103寄存器内设置其最大SPI时钟频率为500 kHz,CSB为低时开始传送数据,变高时结束传输,传输指令或数据时,MSB(高位)首先发送,LSB(低位)在后发送,每个输出数据通过MISO线在SCK下降沿被改变,每一Bit采样是通过MOSI线在SCK的上升沿开始。从CSB下降沿开始,被选中的设备开始进行8-bit的指令传输。通过CSB 的上升沿结束所有的数据传输并且重新设定内部的计数器和指令寄存器[5]。如果一个无效的命令被收到,MISO将呈现高阻态并且锁定芯片内的数据,直到CSB呈现下降沿,系统再重新初始化串行通信,系统软件工作流程如图3所示。
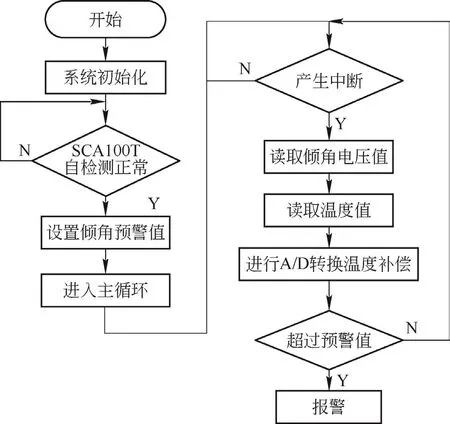
图3 系统软件工作流程图
处理器读取的是一个8比特的数据(0-255),采集数据通过式来进行转换

式中:Counts为读取的温度数据,T为采集的温度。
2.3 对采集数据进行温度补偿
为得到更高精度的倾角值,当处理器接收到传感器传输来的温度值时,可以通过对offset和sensitivity值进行温度补偿,补偿后的值分别用OFFSETcom和SENScomp来表示,其温度补偿公式为

式中:T为传感器测得温度,offcorr为平均角度温度曲线结果。

式中:offset为未经过校正的实际度数,OFFSETcom为经过校正后的度数。
式中:Scorr为平均灵敏度曲线结果,SENS为没有校正前的灵敏度(4/g),SENScomp为经过校正的灵敏度。
2.4 实验数据验证
为了验证系统测量数据的精确度,可以利用正弦规测量仪来进行验证,正弦规依据三角函数中正弦定律而设计的,一般用于测量小于45°的角度,在测量小于30°的角度时,精确度可达3″~5″。结构由一钢制且两侧带挡板的长方体和固定在长方体两端的2个直径相同的圆柱体组成,结构如图4所示。
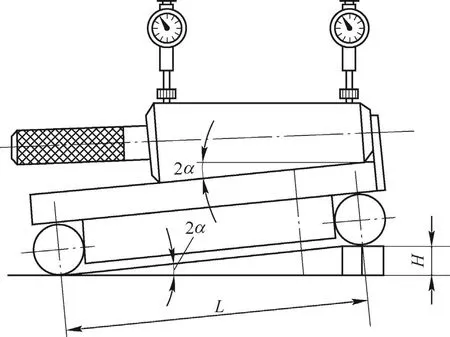
图4 正弦规工作示意图
具体验证方法为:先将正弦规放在精密平台上,然后再将该装置的定位面平靠在测量挡板上,在圆柱体下端放置量块,已知量块高度H和2圆柱体的轴心线距离L,再利用正弦公式即可求出正弦角,通过选用不同高度的量块即可验证系统测量数据的准确性。
3 结语
因起重机吊臂倾斜角度不易检测,经常依靠操作人员目测感觉的方法来进行判断,准确性不高且容易发生倾覆事故,本文设计的起重机倾角检测装置,解决这一问题。随着倾角传感器和嵌入式技术的发展,将二者结合设计出一款适用于工业实际检测要求的起重机倾角检测系统,以达到高精度且实用性高的设计目的。首先利用高精度双轴倾角传感器检测吊臂的倾角,将采集的模拟量通过串口传输到处理器STM32F103,再利用传感器自带的温度采集芯片,将采集的数字量通过SPI总线与处理器通信,同时利用采集的温度值对测量倾角进行温度补偿,结合RS485通信技术再将处理后的倾角值传输至上位机进行实时的监测。最后经过实验该系统测量结果与参考数据吻合较好,符合实验精度要求,具有较好的应用前景。
猜你喜欢
气象水文海洋仪器(2021年3期)2021-10-15
北京汽车(2021年3期)2021-07-17
科学大众·小诺贝尔(2021年10期)2021-01-22
计算机技术与发展(2020年4期)2020-04-30
现代计算机(2020年3期)2020-03-05
电子制作(2019年9期)2019-05-30
设计(2017年13期)2017-10-31
数码世界(2017年5期)2017-06-06
科学中国人(2017年17期)2017-01-28
山东工业技术(2016年15期)2016-12-01