
基于特征选择与骨架提取的种子萌发的芽长、根长检测
2021-07-23 13:03金沙沙贾良权龙伟祁亨年赵光武高璐蒋林华
江苏农业学报 2021年3期
关键词:图像处理
金沙沙 贾良权 龙伟 祁亨年 赵光武 高璐 蒋林华


摘要: 芽长是种子活力的一个重要判定标准。传统的芽长检测方法采用人工测量方式,存在费时费力、且受人为主观因素影响较大等问题。利用数字图像处理技术的芽长自动检测算法可以提高芽长测量的效率,并且能够统一测量标准从而避免主观误差。本研究基于特征选择与骨架提取算法原理设计了种子芽长、根长检测复合算法及软件,首先利用颜色特征提取叶片信息,并在整株芽长二值图像中去除叶片区域信息,其次通过圆盘结构元素与线性结构元素腐蚀图像分割出种子图像,獲得种子的中心,再对整株芽长二值图像进行图像增强和边缘轮廓处理,最后对芽长图像进行骨架提取与剪枝,依据像素点间的欧氏距离计算芽长与根长。通过对玉米、小麦、水稻的芽长和根长进行测量,结果显示,玉米、小麦与水稻芽长的百分误差分别为2.90%、2.05%、2.40%;根长的百分误差分别为1.90%、2.11%、2.02%。说明基于特征选择与骨架提取检测方法的复合算法能够实现对种子萌发的芽长与根长的高精度、快速检测。
关键词: 图像处理;芽长检测;根长检测;颜色特征;骨架提取
中图分类号: S339.3+1 文献标识码: A 文章编号: 1000-4440(2021)03-0597-07
Detection of seed bud length and root length based on feature selection and skeleton extraction
JIN Sha-sha1,2, JIA Liang-quan1,2, LONG Wei1,2, QI Heng-nian1,2, ZHAO Guang-wu3, GAO Lu1,2, JIANG Lin-hua1,2
(1.School of Information Engineering, Huzhou University, Huzhou 313100, China;2.Zhejiang Provincial Key Laboratory of Smart Management & Application of Modern Agricultural Resources, Huzhou 313100, China;3.College of Agriculture and Food Sciences, Zhejiang A & F University, Hangzhou 311000, China)
Abstract: Bud length is an important criterion for seed vigor judgement. Traditional detection methods for bud length used manual measurements, which had the problems such as time consuming and the measuring results were affected by experimenters subjective factors greatly. Automatic detection algorithm of bud length using digital image processing technology could improve the detection efficiency and unify the measurement standard to avoid subjective error. A compound algorithm and software for seed bud length and root length detection were designed based on the principle of feature selection and skeleton extraction algorithm. Firstly, the leaf information was extracted based on the color feature, and the leaf region information was wiped off in the binary image of bud length for the whole plant. Secondly, image of the seed was segmented based on eroded images of disk structure element and linear structure element, and the center of the seed was got. Then the binary image for bud length of whole plant was enhancement and the edge contour of the image was processed. After that, skeleton of the bud length image was extracted and the image was pruned, the bud length and root length were calculated according to the Euclidean distance between pixels in the skeleton. Bud length and root length of corn, wheat and rice were measured in the study. The results showed that, average percentage error of the bud length of corn, wheat and rice were 2.90%, 2.05% and 2.40% respectively, while for root length the data were 1.90%, 2.11% and 2.02% respectively. The experimental results show that, the compound algorithm based on feature extraction and skeleton extraction can detect the bud length and root length during seed germination precisely and fastly.
Key words: image processing;bud length;root length;color feature;skeleton extraction
研究结果表明,种子发芽时的芽长与根长是衡量种子活力、判断种子质量的重要指标[1-3]。在种子发芽试验中,经常要统计发芽率、幼苗长度以及生长速度。傅丹桂等[4]对水稻种子活力的测定方法进行了比较,结果发现在幼苗生长试验中,幼苗芽长与田间出苗率具有极强的相关性,但芽长需要大量人工测量,故使用幼苗生长试验检测种子活力的方法并未得到推荐。何晶等[5]研究了不同长度的麦芽与其消食健胃功效的关系,得出在芽长为0.75~1.25 cm时,麦芽消食的疗效达到最佳。但在此试验中,研究人员需要收集成百上千粒指定长度的麦芽进行对照试验,纯人工制备长度不同的麦芽过程繁琐、费时费力,且存在受试验人员主观因素影响的问题。因此,各类种子发芽试验均需要一种客观、快速、自动化获取芽长的方法。
图像处理技术作为一种无损检测技术,在植物病虫害检测[6]、果蔬分级分类[7]、农作物长势[8]等方面具有良好的应用前景。计算机内存的拓展、体积的微型化、计算速度的提高、图像处理技术的发展为芽长的自动检测提供了条件。早在20世纪九十年代初, Howarth等[9]就开始尝试使用计算机图像处理技术、机器视觉技术分析生菜和高粱幼苗主根的長度从而确定种子活力。路文超等[10]通过图像处理技术研究了小麦麦穗长度测量和小穗数同步计数的方法。Yamamoto等[11]结合图像处理技术与机器学习算法定位番茄幼苗节点的位置,从而测量番茄幼苗相邻节点间的长度以判断番茄幼苗的活力。张万红[12]基于图像法提出了适用于离体小麦、黄豆、苹果等叶片的叶面积、叶长等几何参数的计算方法。冯青春等[13]利用广度立体视觉测量辣椒秧苗的叶片倾角、长度和面积,以实现智能评估蔬菜秧苗的长势。Flavel等[14]基于公共图片处理工具ImageJ开发了一种从X光断层扫描三维图像中分割植物复杂根系的算法,对植物根系长度与角度进行了分析。杨红云等[15]为了即时监控水稻的生长状况,采用插值法和骨架提取法获取水稻叶片几何形状参数。总之,目前国内外对种子发芽时的根长或芽长的自动检测方法研究较少,目前还未有完善的针对种子萌芽阶段的芽长检测方法,但是这些利用图像处理技术为芽长自动化检测提供了研究思路,在技术上有很强的参考价值。
本研究通过采集种子发芽图像,基于颜色特征与形状特征,综合运用形态学骨架提取与剪枝算法,获得种子萌发的精细骨架,实现芽长与根长的自动检测,并与手工测量方法进行了对比,从而验证本研究算法的准确率。
1 材料与方法
1.1 样本图像采集
试验选取发芽7~14 d且长势良好的玉米、小麦与水稻幼苗各50株为研究对象。首先以A4纸左右大小的黑色绒布为背景,在卡纸顶端1/5处摆放1枚直径为25 mm的1元硬币作为参照物,将玉米、小麦、水稻幼苗分别摆放在绒布中间位置,每次摆放10株幼苗,且相邻幼苗之间不互相接触。然后在下午太阳光较弱的时候,使用焦距为4 mm的相机在垂直于绒布1 m处进行拍照,收集清晰、反光少的图片,并将图片导入计算机硬盘备用。
1.2 试验条件
试验采用基于Dell OptiPlex 3050台式机(CPU i7-7700@3.60 GHz,8 GB内存,480 GB固态硬盘)的windows10家庭版64位操作系统,以Matlab R2019a为集成开发环境,自主开发了能够自动识别、计算芽长的软件。软件的前面板如图1所示,该软件基于特征选择和骨架提取算法进行芽长自动识别计算,可以实现单幅图像与多幅图像长度检测2种功能。单幅图像长度检测面板具有良好的交互性,当使用鼠标选中图像数据时会在对应骨架图像中发生响应;多幅图像长度检测可以连续检测多幅图像的长度并将数据存入Excel文件中。
1.3 研究方法
1.3.1 特征选取 种子萌芽阶段的图像特征提取是实现芽长自动化检测的重要前提条件。根据经验,芽一般呈月白色、嫩绿色或绿色;根一般呈白色。种子的形状特征在种子萌芽图像中较为突出,是定位中心的关键一环。因此本研究利用绿芽的颜色特征,在整株芽的二值图像中去除绿芽区域信息,排除绿芽大面积区域的干扰,结合种子的形状特征分割出种子区域从而求得种子的中心,综合运用形态学骨架提取与剪枝算法获得种子的中心骨架,从而计算芽长与根长。
1.3.1.1 颜色特征 图像分析是从图像中提取有用的数据、信息、度量等特征的过程[16]。RGB是最常用的颜色空间之一,包括红、绿、蓝3个分量的通道。在图像中,任意像素点的颜色都可以通过3个通道的灰度级来协同表达[17]。张志斌等[18]推断出绿色通道的灰度级同时比蓝色通道和红色通道的灰度级高。受此启发以及对RGB模型彩图的观察,本研究经过试验得出,在以黑色为背景的RGB图中,绿芽与根须在RGB颜色空间的灰度级关系为:
greenleaf=(gvalue-bvalue>10)∩(gvalue-rvalue>10)(1)
whiteroots=(rvalue>70)∩(gvalue>70)∩(bvalue>70)(2)
式子中rvalue、gvalue、bvalue分别表示R、G、B通道的灰度级;greenleaf指只包含绿芽的像素点的集合;whiteroots指剔除了大部分背景的像素点的集合,其中囊括了较细根须的像素点。
1.3.1.2 形状特征 种子萌发的图像包含了丰富的形状特征,如种子籽粒的形状一般可为圆形、矩圆形、椭圆形、卵圆形、马齿形[19]等。图2中从左至右分别为马齿形的玉米种子、椭圆形的小麦种子、细长形的水稻种子。
在种子萌芽图中,种子的横截面宽度一般比芽、根的横截面宽度大。但随着叶片的生长,绿叶的宽度可能会超过种子的宽度。因此可以利用颜色特征排除大面积绿色叶片的干扰后,选取盘状结构元素,对去除绿色叶片后的图像进行腐蚀操作,删除不大于盘状结构元素的区域信息,从而留下只包含种子的连通区域。
1.3.1.3 阈值分割 阈值分割的目的是为了凸显目标区域的信息[20-22]。由于本研究的研究目的是测量芽长,因此在特征提取定位后只需关注位置信息而不再关心颜色信息,只需输出2种灰度级:0和255。本研究通过颜色特征区域定位确定目标区域的阈值,判断图像中的每一个像素点是否满足阈值的要求,从而进行阈值分割,其计算公式如下:
O(r,c)=255, I(r,c)∈ROI0,I(r,c)ROI(3)
式中I(r,c)表示输入图像中第r行第c列的像素点的灰度级;ROI为满足公式(1)或(2)的感兴趣区域的集合。本研究通过在试验过程中对图像各个像素点三通道灰度级的观测,得出芽图像中G通道的灰度级最高,且G通道的灰度级与B通道或R通道的灰度级的差值均大于10的结论,由此作为芽的分割阈值。本研究采用了较为简单的黑色背景,观察图像三通道的灰度直方图,发现三通道低灰度级的交集在0~70,故将三通道灰度级皆低于70的像素点归为背景。而在图像分辨率较低的图像中,较细的根须的颜色特征不显著,其轮廓与背景的区分度没有芽和较粗根须与背景的区分度高。普通阈值分割方法容易将其误认为背景。因此本研究将三通道灰度级均大于70的像素点归为前景,与通过普通阈值分割方法获得的二值图相加,作为根须图像的增强与补充。
1.3.2 骨架提取与剪枝原理 骨架提取是一种图形细化算法,其获取的骨架是一组将原始图像信息量简化却不失连通性与拓补结构的信息,能够完整表达图像形状的曲线集合[23]。本研究以8连通来确定骨架的连通性,图3A表示以点P为中心点的8连通。如图3所示,在8连通下,没有相邻骨架点的中心点被称为孤立点;有1个相邻骨架点的中心点称为端点;有3个及以上相邻骨架点的中心点被称为分叉点。由于本研究目的在于测量芽长或根长,因此剪去骨架上的所有分支,只保留中心骨架。
本研究提出了一种端点删除剪枝法(Endpoints removal pruning)提取中心骨架,其算法流程图如图4所示,具体实现步骤如下:
1) 遍历图像,生成骨架端点二值图。
2) 获取骨架端点二值图中各端点的坐标,并将端点坐标按行排序,得到中心骨架垂直方向上的首端点与尾端点。
3) 删除骨架端点二值图中的首尾端点,得到分支端点二值图。
4) 用骨架二值图减去分支端点二值图,得到新的骨架二值图。
5) 判断新生成的骨架二值图中是否只含有2个端点,否则重复(1)至(4)的操作。当新骨架二值图中只含2个端点时,这2个端点即为中心骨架的首尾端点。此时上一步获得的新骨架二值图即为所求的中心骨架图。
1.3.3 长度计算方法 本研究采用像素点间的欧式距离计算骨架的像素长度,其公式为:
L=∑n1(xi-xj)2-(yi-yj)2(4)
式中,L表示所有相邻像素点间的欧式距离的累加和;(xi,yi)与(xj,yj)分别表示第i个像素点与第j个像素点在图像中所在的位置;n表示像素点的数量。骨架频繁转折的不平滑现象,会导致连续的像素点之间的距离和大于实际的芽长、根长。因此本研究在计算芽长(根长)时每4个(6个)像素点计算1次欧式距离以减少骨架转折的误差。
像素距离仅能代表物体的相对长度。为了规避由相机像素、拍摄距离、拍摄角度等因素引起的误差,本研究以直径为25 mm的1元硬币为参照物,将像素长度换算成以毫米为单位的实际长度,其公式为:
ratio=Lcoin/2(5)
Lal=L/ratio(6)
式中,Lcoin代表硬币的像素长度;ratio表示像素长度与实际长度的比例;Lal表示物体的实际长度。
骨架细化的过程会损失部分长度。芽的直径越大,所产生的误差越大。因此需要对骨架长度进行修正,其公式为:
Lc=xtb-xtsratio(7)
Lt=Lal+Lc(8)
式中,xtb与xts分别表示增强后的二值图中芽的顶端与中心骨架顶点所在行数;Lc为修正的距离,Lt为修正后的总长度。
试验中利用Adobe Illustrator在尺寸为A4纸大小的画布中绘制边长为5 mm的正方形网格,通过打印机打印,再使用相机拍摄并将图像导入Matlab中,用标尺测量各个正方形之间的间隔,发现本研究所采用的镜头会引起视场边缘的放大率比中心部分高所导致的枕形畸变。硬币位于芽、根图像的上方,其拉伸程度大于硬币下方位置,因此以硬币作为参考物计算出的芽长(根长)小于实际长度。以芽长为例,若将芽长分段,其误差从芽底端到芽顶端逐渐减小,因此整株芽的长度误差在可接受的范围内。经试验分析,本研究使用的镜头畸变引起的测量误差为0~3 mm。
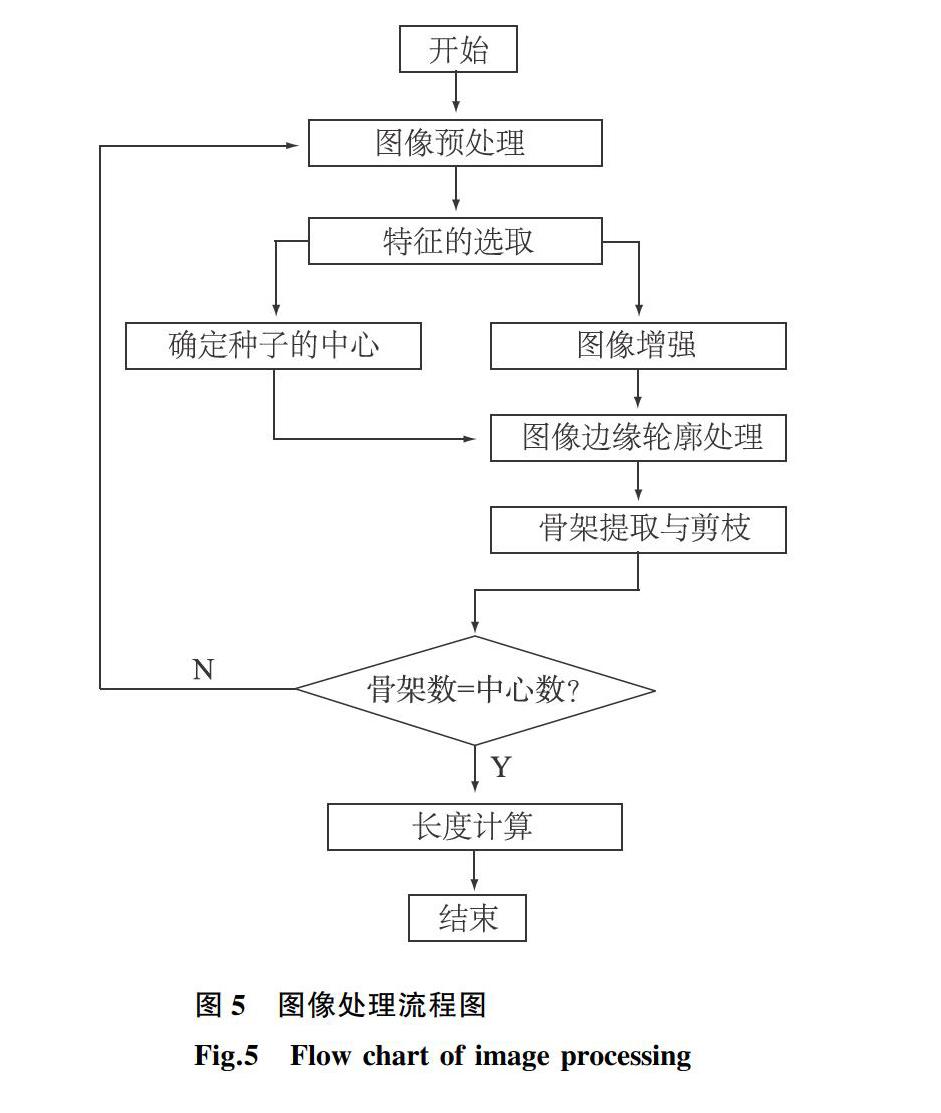
1.3.4 图像处理过程 芽长的检测过程包括图像预处理、颜色特征的选取、确定种子中心、图像增强、图像边缘轮廓处理、骨架提取与剪枝及长度的计算,具体流程如图5所示。本研究首先对整株芽的灰度图像進行预处理。为初步降低图像前景与背景光照不均的影响,本研究利用形态学顶帽算法对图像进行开运算,并用原图像减去经过形态学开运算的图像,从而使种子的图像,尤其是根部的图像更为清晰。由于本研究算法中涉及较多结构元素对图像进行腐蚀操作,而图像的尺寸会影响该腐蚀操作的结果,因此本研究以500像素作为参照,将图像的宽度缩小到500像素左右。然后本研究提取图像中的绿芽与白根的颜色特征、种子的形状特征从而确定种子的中心,并对整株芽长二值图像进行增强,再结合种子的中心位置对增强后的二值图像进行边缘轮廓处理,最后进行骨架提取与剪枝。若提取的骨架数量与中心数量相等,则对骨架进行长度计算,否则重新对图像进行预处理,重复以上步骤。
1.3.5 结果评价 本研究用自主开发的芽长检测软件测量玉米、小麦、水稻的芽长与根长,并将试验数据与手工测量结果进行对比分析,进行绝对误差(Absolute error,AE)和百分误差(Percentage error,PE)计算,从而验证算法的可靠性。
AE=h(xj)-yj(9)
PE=AEyi×100%(10)
式中,h(xi)是本研究算法求取的样本i的测量值,yi是手工测量法求取的样本i的测量值。
2 结果与分析
2.1 特征选取
叶片颜色特征选取是为了在图像中去除面积较大的叶片信息,从而有利于分割出种子。以小麦种子为例,根据公式(1)提取的绿芽图像如图6A所示。利用种子的形状与圆盘相似的特点,使用strel函数构建半径为1的圆盘结构元素对去除了叶片干扰的图像(图6B)进行形态学腐蚀[24],得到图6C,再分别构建长度均为3的垂直结构元素和水平结构元素对图6C进行调整,提取的种子区域如图6D所示。
2.2 确定种子的中心
获取种子的中心是为了以中心的坐标为基准,在骨架图中区分芽与根。图像腐蚀往往不能一步到位。图7A为玉米种子萌芽图像经过形态学腐蚀操作获得的二值图,其中仍有部分小面积区域干扰种子中心的判定。通过重新识别芽的个数发现图像中有5株芽,因此利用regionprops获取每个连通区域的面积和中心坐标后,将面积大小按降序排序,保留前5个面积较大的连通区域。种子特征选取结果如图7B所示,最后再次利用regionprops函数获取图7B中种子的中心。试验测试中采用赋值的方法,将RGB图中与所获取的各个种子中心的像素点坐标对应的位置设为黑色(图7C),并观察此黑色像素点是否在种子的中心,包含此坐标的水平线是否与种子发芽点相交。水平线与发芽点越接近,种子中心位置确认的准确性越高。
2.3 图像增强
图像增强是为了解决在将种子萌芽的灰度图转换为二值图的过程中,由于根须极细且灰度级与背景较为接近,部分根须未被识别出来的问题。灰度图的图像增强的方法主要有直方图均衡、同态滤波、基于Retinex理论的增强方法等[25]。但是这些图像增强方法是对图像整体进行光照不均匀的修正,在增强根须的像素时,效果不明显。因此本研究采用简单的黑色背景,在拍摄过程中避免图像反光,从而利用根须的颜色特征提取极细的根须(图8C)。经计算,增强后的二值图(图8D)比原二值图中的根须长30个像素的距离。
2.4 图像边缘轮廓处理
由于种子根部弯曲、伸展,相邻种子的根须可能会互相接触,从而被算法判定为同一个物体,因此需要对图像的边缘轮廓进行处理。
2.4.1 去除相邻种子的连通性 记相邻2个中心点的坐标分别为(Cx1,Cy1)、(Cx2,Cy2)。本研究分段提取出以| Cx1 -Cx2 |为宽、| Cy1 -Cy2 |+40为高的矩形区域,使矩形中线区域的灰度级为0,从而切断2个种子之间的连通性。与图8D相比,切断连通后的图9B右侧有明显切痕,避免侧根与相邻种子相连通。
2.4.2 保证像素点的连续性 获取连续骨架的关键在于使种子萌芽的图像保持在一个连通区域。本研究使用图3A中的模板遍历整幅二值图,提取种子萌芽图像的边缘轮廓并用imfill函数填充封闭轮廓的内部,既保证了像素点的连续性,又避免了骨架细化时出现闭环区域。
2.5 骨架提取与剪枝
为了利用中心骨架上的像素点进行长度计算,本研究利用bwmorph函数对二值图像进行骨架提取,将图像中的所有对象都简化成结构不变的线条。由于前期对相邻种子间进行了切断连通区域的处理,图像中可能存在面积较小的不连通区域,故此步骤中采用bwareaopen函数,去除骨架面积小于20的连通区域。图10A为已经去除不连通区域的骨架图,要获得不含分支的中心骨架还需对骨架进行剪枝操作。利用端点删除剪枝法剪枝的结果如图10D所示。获取骨架上所有像素点的坐标,将RGB图中与此坐标对应位置的像素点设为黑色,得到黑色的骨架线,观察此骨架线与种子芽(根)的中心线是否重合(图10D),重合度越高,骨架提取准确性越高。
2.6 数据分析
本研究以玉米、小麦、水稻幼苗各50株为研究对象,令每张图像中含有10株样本幼苗图像。在本试验环境中,算法对于每张图像的平均运行时间约为10 s。玉米、小麦与水稻的试验数据与手工测量结果对比统计结果如表1与图11所示。玉米、小麦与水稻芽长的百分误差分别为2.90%、2.05%、2.40%;根长的百分误差分别为1.90%、2.11%、2.02%。一般情况下,由于芽的特征比根的特征简单,芽长的绝对误差普遍比根长的绝对误差小;但由于芽长比根长短,在对其计算百分误差时分母较小,因此芽长的百分误差比根长的百分误差稍大。大部分绝对误差较大的根,在靠近种子的区域,骨架均偏离了主根。造成这个问题的关键在于种子的须根未充分展开,与主根形成了闭环,在边缘轮廓内部填充之后,须根与主根融为一体,致使后续的骨架细化保留的是须根与主根的中心区域,从而产生了较大的误差。特殊地,若受培育环境影响,芽先向地心引力方向生长再朝地心引力反方向生長,则此法在芽与根的骨架分割时会产生误判,从而致使芽长的绝对误差较大。
3 结论
本研究基于Matlab函数库,利用图像处理技术对种子萌发的芽长与根长自动检测算法进行了研究,建立了芽、根特征的判别关系,提出了一种基于端点删除的剪枝方法,对玉米、小麦、水稻的芽长和根长进行了自动检测试验,并与人工检测方法进行了对比,得出玉米、小麦与水稻芽长的百分误差分别为2.90%、2.05%、2.40%;根长的百分误差分别为1.90%、2.11%、2.02%。本研究方法对实现种子萌发的芽长与根长的自动检测具有可行性,可为试验室种子发芽试验的芽长度计算等提供算法参考。
本研究提出的方法针对背景简单的芽、根图像的检测效果较好,但对于背景复杂、不同根须交错的图像不能很好地将其分割开来,这一问题的解决亟待研究。鉴于目前通过图像研究芽长、根长的过程较为繁琐,在未来的工作中,课题组拟简化试验操作过程,深入研究仅依靠地面图像来计算芽长的方法,以便让芽长检测技術更好地服务农业生产实践。
参考文献:
[1] MARCOS FILHO J. Seed vigor testing: an overview of the past, present and future perspective[J]. Scientia Agricola, 2015, 72(4): 363-374.
[2] DENG F, QI H N, ZHAO G W. Seed vigor assessment for Cunninghamia lanceolata and Pinus massoniana using image processing[J]. Transactions of the Chinese Society of Agricultural Engineering, 2012, 28(S2): 274-279.
[3] 何龙生,俞兵桥,赵光武,等. 根长测定法在常规水稻种子活力测定中的应用[J]. 江苏农业科学, 2019, 47(11): 89-93.
[4] 傅丹桂,孙 雁,黄正仙,等. 水稻种子不同活力测定方法的比较[J]. 云南农业大学学报(自然科学), 2018, 33(5): 811-817.
[5] 何 晶,陈 敏,陈永刚,等. 基于消食作用优选麦芽适宜芽长[J]. 医药导报, 2018, 37(10): 1178-1181.
[6] IQBAL Z, KHAN M A, SHARIF M, et al. An automated detection and classification of citrus plant diseases using image processing techniques: a review[J]. Computers and Electronics in Agriculture, 2018, 153: 12-32.
[7] BHARGAVA A, BANSAL A. Fruits and vegetables quality evaluation using computer vision: a review[J]. Journal of King Saud University-Computer and Information Sciences, 2018, doi: https://doi.org/10.1016/j.jksuci.2018.06.002.
[8] SREEKANTHA D K, KAVYA A M. Agricultural crop monitoring using IOT-a study[C]//KARPAGAM COLLEGE OF ENGINEERING, IEEE MADRAS SECTION. In proceedings of the 2017 11th international conference on intelligent systems and control (ISCO). Coimbatore, India: IEEE, 2017: 134-139.
[9] HOWARTH M S, STANWOOD P C. Measurement of seedling growth rate by machine vision[J]. Transactions of the ASAE, 1993, 36(3): 959-963.
[10]路文超,罗 斌,潘大宇,等. 基于图像处理的小麦穗长和小穗数同步测量[J].中国农机化学报,2016, 37(6): 210-215.
[11]YAMAMOTO K, GUO W, NINOMIYA S. Node detection and internode length estimation of tomato seedlings based on image analysis and machine learning[J]. Sensors, 2016, 16(7): 1044.
[12]张万红.基于图像法的离体小麦叶片几何参数计算[J]. 浙江大学学报(农业与生命科学版), 2018, 44(6): 748-754.
[13]冯青春,陈 建,李翠玲,等. 基于光度立体视觉的蔬菜秧苗叶片形态测量方法[J]. 农业机械学报, 2018, 49(5): 43-50.
[14]FLAVEL R J, GUPPY C N, RABBI S M R, et al. An image processing and analysis tool for identifying and analysing complex plant root systems in 3D soil using non-destructive analysis: root1[J]. PloS One, 2017, 12(5): e0176433.
[15]杨红云,路 艳,孙爱珍,等. 水稻叶片几何参数无损测量方法研究[J]. 江西农业大学学报, 2020, 42(2): 407-418.
[16]杨 丹. Matlab图像处理实例详解[M]. 北京: 清华大学出版社, 2013: 311-317.
[17]杜枭雄. 苹果采摘机器人视觉系统的目标识别研究[D]. 汉中:陕西理工大学, 2019.
[18]张志斌,罗锡文,臧 英,等. 基于颜色特征的绿色作物图像分割算法[J].农业工程学报, 2011, 27(7): 183-189.
[19]李洪池,罗 建. 西藏色季拉山区龙胆科植物种子微形态特征及其系统分类学意义[J]. 植物科学学报, 2019, 37(6): 699-708.
[20]董 松,徐晓辉,宋 涛,等. 基于过渡区研究的黄瓜病害识别方法[J].南方农业学报,2019,50(9):2119-2126.
[21]赵建鹏,杨秀峰,李国洪,等. 基于面向对象的设施蔬菜高分遥感影像提取[J].江苏农业学报,2019,35(4):911-918.
[22]佘银海,王新彦. 基于双目立体视觉的草坪植株高度测量[J].江苏农业科学,2020,48(4):215-221.
[23]王金玲. 保持图像骨架连续的剪枝技术及相关问题研究[D]. 济南: 山东师范大学, 2010.
[24]GONZALEZ R C, WOODS R E. Digital image processing [M]. 3rd Edition.Beijing: Publishing House of Electronics Industry, 2017.
[25]梁 琳,何卫平,雷 蕾,等. 光照不均图像增强方法综述[J]. 计算机应用研究, 2010, 27(5): 1625-1628.
(责任编辑:陈海霞)
猜你喜欢
今日自动化(2022年5期)2022-07-22
电脑知识与技术(2022年9期)2022-05-10
电脑知识与技术(2022年9期)2022-05-10
计算技术与自动化(2022年1期)2022-04-15
教育教学论坛(2018年5期)2018-01-22
科技视界(2016年26期)2016-12-17
新教育时代·教师版(2016年26期)2016-12-06
科技视界(2016年21期)2016-10-17
企业导报(2016年10期)2016-06-04
