
大视场低畸变的星敏感器光学系统设计*
2021-07-25 15:46谢运强刘春雨
机电工程技术 2021年6期
王 循,谢运强,刘春雨,解 鹏,刘 帅
(1.中国科学院长春光学精密机械与物理研究所,长春 130033;2.中国科学院大学,北京 100049)
0 引言
近年来,随着科学技术在各个领域的发展,推进了航天事业的不断进步。微纳卫星作为一种创新型空间航天技术研究产物,其本身拥有体积小,重量轻且灵活性强等优势,可满足空间遥感、定位、图像识别等多种需求,是未来空间航天技术领域的重要发展方向[1-3]。星敏感器通过光学遥感技术,探测宇宙天体中恒星发出的微弱信号,通过图像处理等技术进而推测出微纳卫星的飞行姿态信息,是微纳卫星的重要组成部分[4-5]。
目前,星敏感器的重要研究方向在于增大相对孔径和降低畸变。增大相对孔径可使星敏感器中探测器获得更多能量以探测到更多的导航星,降低畸变可提升星敏感器的成像质量,进而提高星敏感器的探测精度[6-7]。此外,由于微纳卫星动辄批量化的需求,故星敏感器向低周期、低成本的方向发展[8]。目前在航天领域广泛应用的星敏感器光学系统相对孔径在1/1.6以上[9]。王虎等[10]设计的一种星敏感器,光学系统相对孔径较大,为1/1.1,但该光学系统成像质量较差,无法满足星敏感器要求。孟祥月等[11]设计的星敏感器光学系统具有较大的相对孔径,为1/1.25,但该种光学系统畸变较大达到了0.05%,导致成像质量有所降低。杜康等[12]设计的星敏感器光学系统相对孔径为1/1.3,畸变较小,为0.013%,具有很好的探测精度,但其采用了非球面设计,加工周期和成本成倍提高,无法满足微纳卫星快速生产及低成本的需求。
本文基于微纳卫星对星敏感器的要求,设计了一种基于球面的星敏感器光学系统。该光学系统具有大视场角、大相对孔径、宽光谱及低畸变的特性,可更好地保证星敏感器的探测精度,从而使微纳卫星在轨时获取更准确的飞行姿态信息。
1 光学系统参数
1.1 星敏感器要求及探测器选择
在星敏感器中,最为重要的部分即为其光学系统,光学系统的优劣程度直接影响星敏感器能否满足探测精度要求。而星敏感器中光学系统的各项参数,主要由探测星等级、探测星数量及所选探测器种类及参数等因素决定。本文根据星敏感器的实际需求,目标获取较大的相对孔径,选用效率和灵敏度较高的CMV300探测器。并对以上需求参数进行约束和统计,具体参数如表1所示。
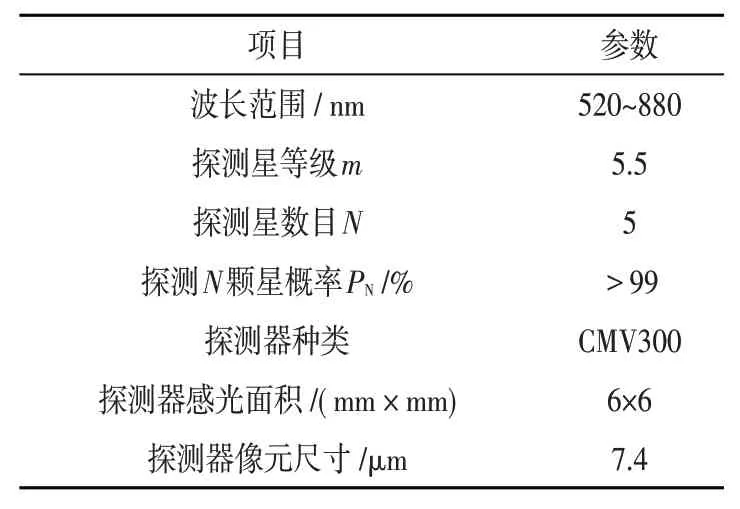
表1 星敏感器要求及探测器参数
1.2 视场角
通过表1可知,星敏感器要求设计的光学系统能够使该星敏感器观测5.5等星,观测星数为5颗,且概率大于99%。通过天体恒星的分布规律,本文设计光学系统视场角参数计算满足如下的泊松分布规律公式:
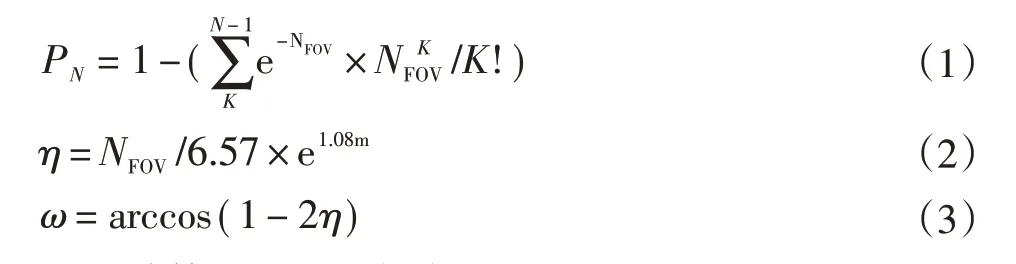
通过计算得出全视场角2ω=18°。
1.3 焦距
本文设计的光学系统焦距F,可通过1.2中计算所得的视场角2ω=18°以及探测器的对角线长度L确定,如下所示:

由表1可知,采用的探测器型号为CMV300,其感光面积为6 mm×6 mm。但是在实际加工装配过程中,探测器可能出现遮拦等现象,感光面积无法完全利用,取其面积的90%作为实际感光面积,导出探测器对角线长度L=7.9 mm,进而可计算出焦距为F=25 mm。
1.4 相对孔径
当星敏感器光学系统的焦距一定时,相对孔径越大,进入探测器的能量越高,星敏感器探测恒星的概率就越高。相对孔径为入瞳孔径与焦距的比值,提高相对孔径即为提高光学系统的入瞳孔径。而光学系统的入瞳孔径由探测器像元大小、探测器积分时间及信噪比等多因素决定。本次采用的CMV300型号探测器,像元尺寸为7.4μm,综合星敏感器探测性能和测控指标要求,本次入瞳直径D=16.7 mm,相对孔径为1/1.49。
2 光学系统设计
2.1 初始结构选取
表2所示为本文设计的星敏感器光学系统参数,根据确定的光学系统参数,选取光学系统初始结构和优化方案。

表2 星敏感器光学系统参数
目前,普遍应用的光学系统主要分为3个种类:反射式、折反射式以及折射式。其中,反射式光学系统无论是同轴反射式还是离轴反射式,均存在加工和装配困难等情况,对于星敏感器的研制成本相对较高。而折反射式光学系统又存在中心遮拦等现象,能量利用率较低。故本文采用了结构上相对简单且视场角较大的折射式光学系统,选取6片匹兹伐改进型物镜作为初始结构,其具体结构及参数如图1及表3所示。
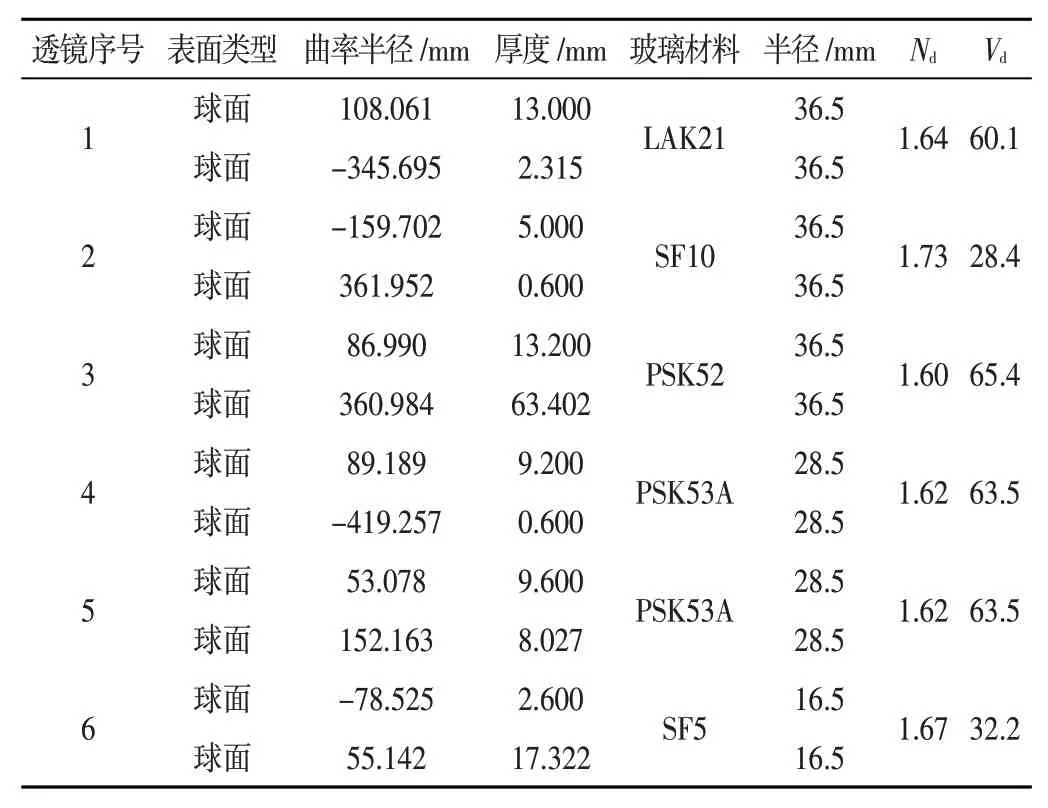
表3 6片匹兹伐改进型物镜参数表

图1 6片匹兹伐改进型物镜结构
2.2 光学系统优化
选定初始结构后,需对整个光学系统进行优化处理。首先对初始结构的光学系统进行焦距缩放,使光学系统焦距满足25 mm;然后根据星敏感器指标要求中其他参数,如波长范围(520~880 nm)、视场角(18°)以及相对孔径(1/1.49)作为光学系统的限定条件,对该光学系统进行进一步优化处理及计算;此外,为了考虑减少加工周期及成本等问题,采用的透镜均采用球面加工,材料均采用国产透镜材料。通过上述约束条件,基于选定的6片型匹兹伐物镜初始结构进行优化,以满足星敏感器精度及制造的要求。
2.3 设计结果
该光学系统基于室温20℃进行优化设计,优化后的光学系统结构及详细参数如图2及表4所示。该光学系统仍保留6片透镜数量,无胶合透镜,且透镜均采用国产材料和球面加工。优化后的光学系统总长仅为37.9 mm,满足微纳卫星中星敏感器小型化及轻量化的要求。
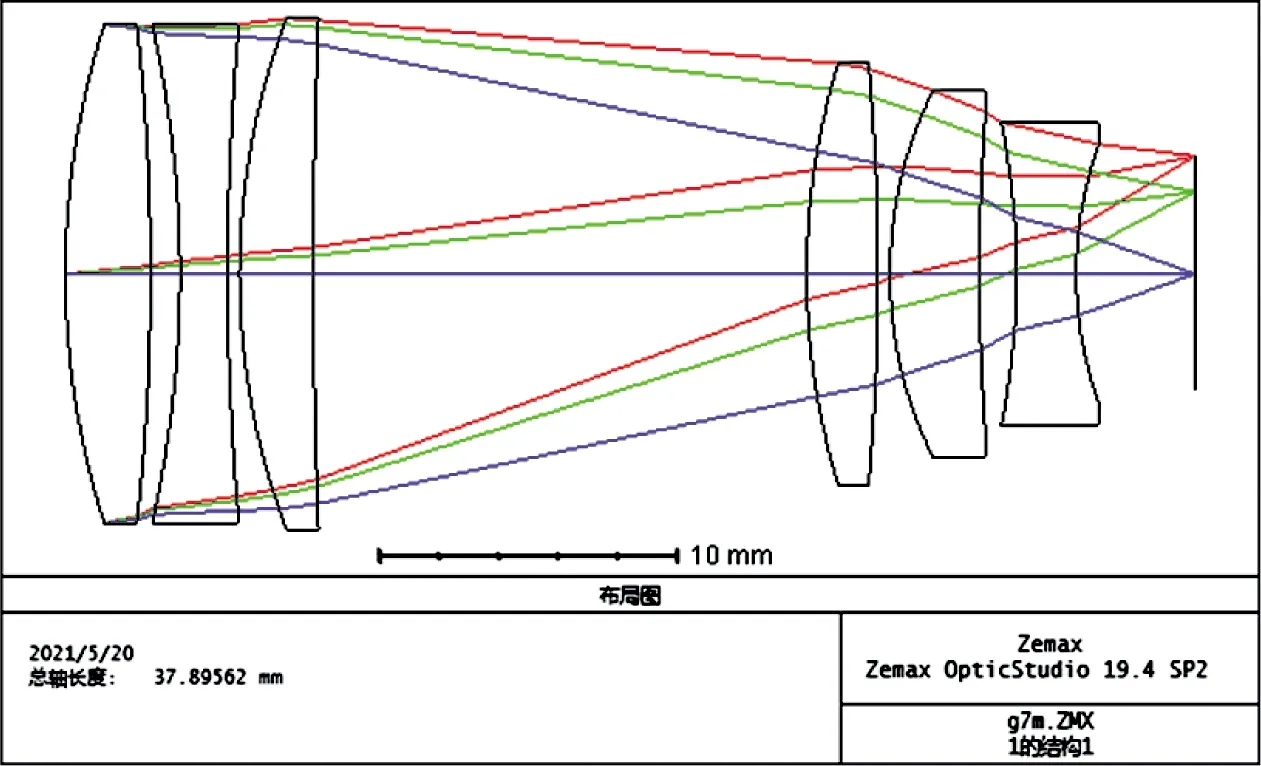
图2 优化后光学系统结构
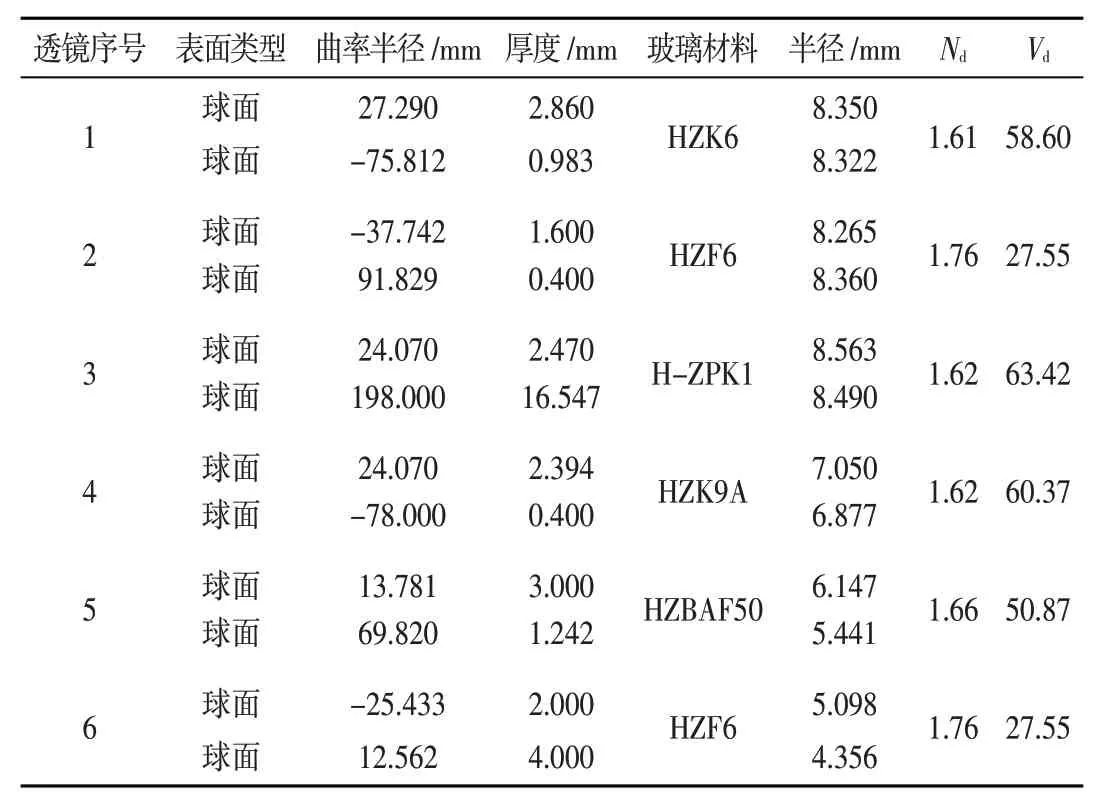
表4 优化后光学系统参数及材料
3 成像质量评价
根据星敏感器的实际使用需求,通过约束波长范围、视场角、焦距及相对孔径,设计并优化了该星敏感器的光学系统。该光学系统总长为37.9 mm,后截距为4 mm,整体尺寸较小,满足微纳卫星中星敏感器小型化要求。通过获取该光学系统点列图、系统场曲及畸变、能量集中度和倍率色差等参数,进而评价所设计的星敏感器光学系统的成像质量。
3.1 点列图
星敏感器工作时,探测到的恒星在星敏感器的探测器上的像形成的弥散斑近似为一个圆点形状,弥散斑的偏差越小,星敏感器探测精度越高。图3所示为设计的光学系统0°、6.3°及9°视场的点列图,该点列图可表示星敏感器的弥散斑成像情况。由图中RMS半径可知,各个视场角的弥散斑均方根半径均小于5μm,表明该光学系统可很好地满足探测恒星的精度要求。此外,通过成像的点列图可知,在整个视场内,弥散斑形状均可近似成较好的圆形,且弥散斑大小基本保持均匀一致,表明该光学系统成像均匀,质量较好。
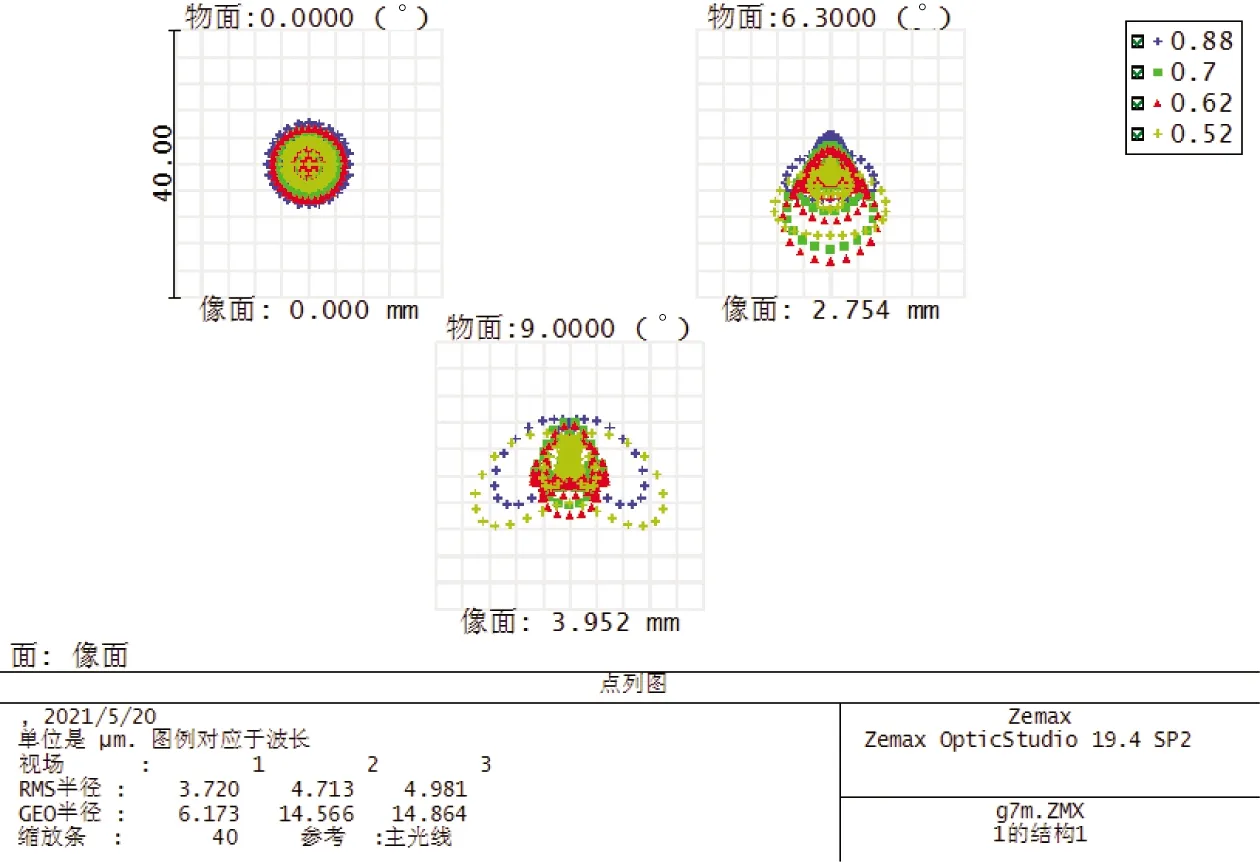
图3 光学系统点列图
3.2 系统场曲及畸变
光学系统发生的畸变可能造成所成的像失去几何对称度,直接影响星敏感器的探测精度,故畸变率是评定光学系统成像质量的重要指标。根据星敏感器要求,光学系统的畸变率应小于0.5%,图4所示为光学系统场曲及畸变,由图可知可知该光学系统场曲小于或等于0.05 mm,畸变率小于或等于0.12%,具有极低的畸变率,可更有效地降低星敏感器测试角度的误差,提升星敏感器的探测精度。
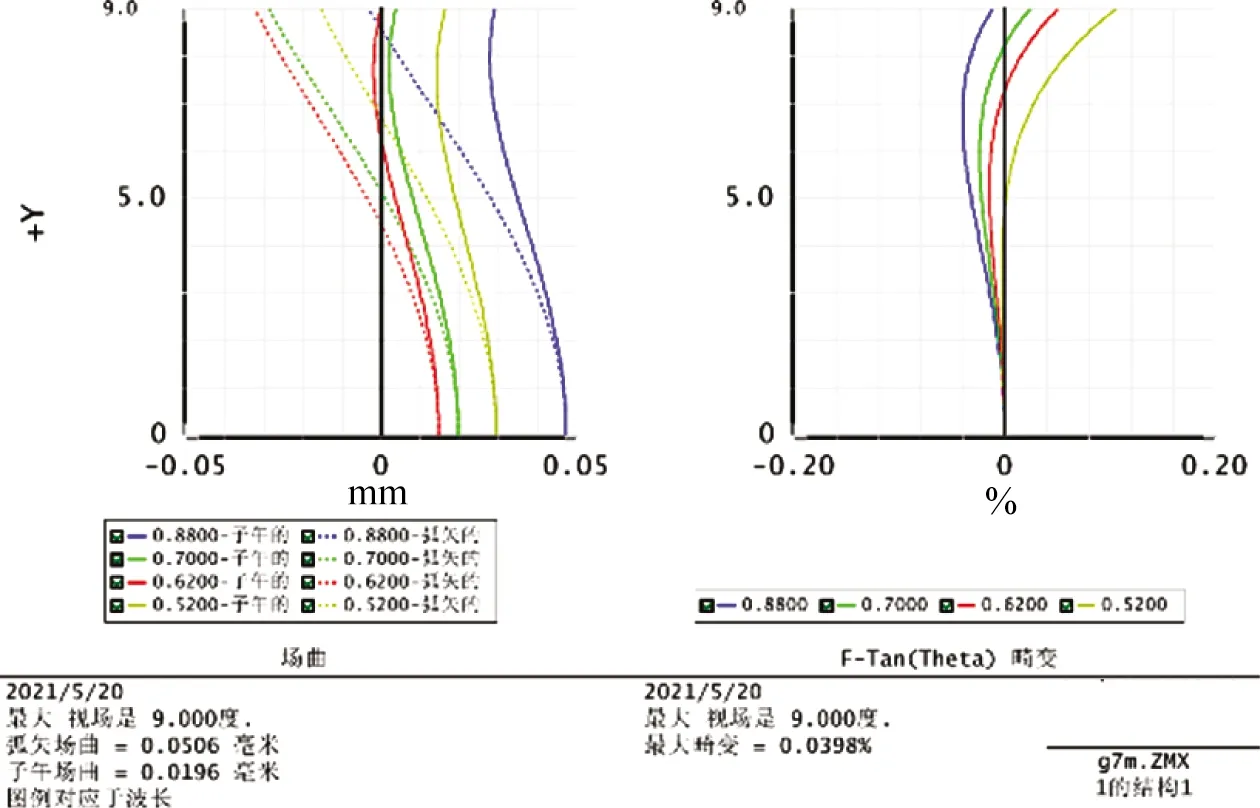
图4 光学系统场曲及畸变
3.3 能量集中度
光学系统的能量集中度表示距离质心一定半径范围内能量分布的比例,也是评价光学系统成像质量的重要指标。在有限半径范围内能量集中度越高,表明成像质量越好。图5所示为光学系统能量集中度曲线,可知在2×2像元尺寸半径范围内,各个视场角度能量集中度较高,均保持在90%以上,有利于提升星敏感器探测恒星的准确度,满足设计要求。
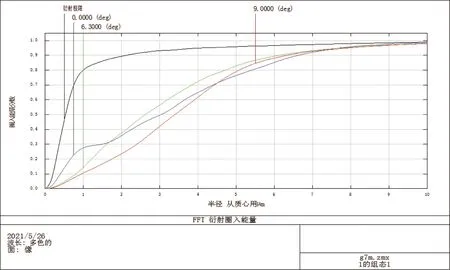
图5 光学系统能量集中度
3.4 倍率色差
倍率色差可以表示光学系统中不同波长的光斑偏离程度,也是评价光学系统成像质量的重要指标。图6所示为最大视场下垂轴倍率色差曲线,可知设计的光学系统倍率色差分布于两侧艾里斑曲线内。表明该光学系统不同位置所成像质量保持一致,具有良好的色差矫正,可有利于提升星敏感器探测精度。

图6 光学系统倍率色差
4 公差分析
星敏感器光学系统中各组件在加工及装配等环节,均会产生误差,进而影响光学系统的成像质量,故需对该光学系统进行合理的公差配置。利用Zemax软件中的公差分析功能对光学系统进行分析,分析结果如表5所示。再通过利用蒙特卡洛分析法,对光学系统进行随机误差分析,结果如表6所示。

表5 光学系统公差分配表
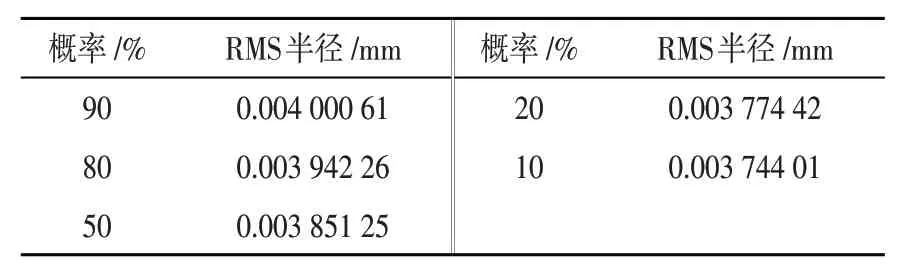
表6 蒙特卡洛分析结果
5 结束语
本文设计了一种基于球面的星敏感器光学系统,该光学系统具有较大的光谱范围(520~880 nm),较大的视场角(18°)以及较大的相对孔径(1/1.49)。光学系统根据6片匹兹伐改进型物镜作为初始结构并进行优化处理,均使用国产透镜材料,并采用球面加工,降低了加工周期及成本。光学系统焦距为25 mm,后截距为4 mm,系统总长仅为37.9 mm,满足星敏感器小型化需求。在光学系统成像质量上,弥散斑呈圆形且大小保持一致,成像均匀。且该光学系统拥有极低的畸变率(小于或等于0.12%),可有效地减小星敏感器的测角误差。此外在2×2像元尺寸半径范围内,各个视场角度能量集中度保持在90%以上,探测恒星准确度较高,且具有良好的色差校正。故该光学系统设计合理,可满足微纳卫星对星敏感器的要求及发展需要。
猜你喜欢
现代电子技术(2022年18期)2022-09-17
宝钢技术(2022年2期)2022-07-09
摄影与摄像(2021年12期)2021-10-01
科学技术创新(2021年25期)2021-09-11
艺术品鉴(2021年21期)2021-08-15
锦绣·上旬刊(2020年3期)2020-06-08
上海涂料(2019年3期)2019-06-19
中国医疗设备(2019年1期)2019-01-15
时代汽车(2018年2期)2018-05-31
摄影之友(影像视觉)(2017年1期)2017-07-18
