地铁车辆ATO模式下的控车方式研究
2021-07-28 03:25曹斌
铁道运营技术 2021年3期
曹 斌
(上海阿尔斯通交通电气有限公司,工程师,陕西 西安 710000)
0 研究背景
随着国内地铁的快速发展和人民生活水平的不断改善,人们对出行工具的选择意愿较多地集中在其能否使自己获得舒适性上,因为,舒适性与否是乘客最直接、最具体、最迅捷的感官认知。地铁是大中城市主要交通运输方式之一。技术研究和实践分析均表明,不同的地铁车辆运用控车方式对乘客体验、设备寿命、维修成本等的影响尤其是累积影响存在反差:合理的控车方式可以在上述方面获得理想预期,反之,则会导致不良后果。基于此,笔者试以西安地铁三号线ATO模式下的控车方式为例进行研究,力求找出合理的控车方式,旨在有效提高车辆乘客乘坐舒适性和制动系统的使用寿命、减少车辆闸瓦配件更换频次和降低车辆养护维修成本。
1 现状描述及问题分析
西安地铁3号线运营4年多时间以来,其运维人员对于车辆制动闸瓦测量对比发现其磨损量明显大于西安1、2号线的车辆制动闸瓦磨损量。通过调查发现其原因为车辆ATO控车方式存在一定问题所致。为有效消除所述问题,本文试以西安地铁3号线正线运营的两种控车方式进行数据分析,旨在为优化较为合理的的控车方式提供依据。
1.1 控车方式一数据分析通过查阅相关行车记录和现场实测得到研究控车方式一所需的数据1和数据2,现作如下分析:
1.1.1 数据1分析 调查分析发现当车辆运营中速度为67 KM/H时,ATO先给出牵引指令信号,牵引力级位需求8%,经过100 MS,ATO直接从牵引指令信号切换至制动指令信号,制动力极位需求为8%,同时电制动进行力的输出,由于多出一个牵引力上升过程,之后牵引力在下降,牵引电机励磁都需要时间,因此,在电制动发挥600 MS后,为了满足制动力需求,1车转向架制动缸1施加压力0.75 pa,经过200 MS后,5车转向架制动缸1也继续施加0.6 pa压力,大约500 MS后撤出,基本为制动闸瓦贴合轮子后撤出。
1.1.2 数据2分析 调查分析发现当车辆运营速度为60.5 KM/H时,牵引指令,牵引力极位需求9%经过200 MS,ATO直接需求制动指令,制动力极位需求9%,同时电制动进行力的输出,由于多出一个牵引力上升过程,之后牵引力在下降,牵引电机励磁都需要时间,因此,在电制动发挥400 MS后,为了满足制动力需求,5车转向架制动缸1施加压力0.35 pa,经过100 MS后,1车转向架制动缸1施加0.8 pa压力,大约500 MS后撤出。
1.2 控车方式二数据分析过查阅相关行车记录和现场实测得到研究控车方式二所需数据1和数据2,现作如下分析:
1.2.1 数据1分析 调查分析发现当车辆运行速度为41 KM/H时,ATO需求牵引指令、极位力的需求为10%,经100 MS后直接转至制动极位,制动力极位需求4%,此时牵引力上升需要200 MS(0-5 KN)之后牵引力需求再下降,而后电制动增加了200 MS后,由于电制动力反应时间短且小,为了满足制动力需求,5车转向架制动缸1施加压力0.6帕,经过100 MS后,1车转向架制动缸1施加0.2帕压力,大约500 MS后撤出。
1.2.2 数据2分析 当车辆运行速度为71.5KM/H时,ATO需求牵引指令、极位力的需求为4%,而后ATO直接需求从牵引指令转至制动指令,制动力需求8%,且持续增加,牵引力转至制动力需要200 MS(0~5 KN),经过100 MS电制动力施加后,由于电制动力反应时间相对较短且力值较小,为了满足制动力需求,1车转向架制动缸1施加的压力为0.75 pa,经过200 MS后,5车转向架制动缸1施加0.9 pa压力,大约500 MS后撤出。
1.3 两种控车方式分析结论据牵引系统及设备性能实验数据得知,当牵引力极位较小即0~5 KN时需要200 ms时间,电机励磁及制动力上升需要时间为400 ms。
由控车方式1数据分析可以看出,都是在开始制动前先增加牵引力需求,之后再直接转成制动指令及需求,增加了牵引力上升及下降的过程时间,进而加大了牵引力的响应时间,且制动系统不能过长时间的等待牵引(安全考虑),同时制动力也不充足,因此气制动会瞬间补充500 MS左右,且补充压力稍大,会造成轻微的磨损闸瓦。
从控车方式2分析可看出,此种状况牵引力下降需要考虑车辆冲击要求(≤0.75 M/S3),牵引系统需求按照一定力的撤出斜率减小牵引力,之后电机励磁,按照冲击斜率电制动力上升需要一定时间,因此也会有气制动瞬间补充,仍为500 MS左右,同样会导致轻微的磨损闸瓦。
经上述分析可以得到基本结论:目前西安地铁3号线运营线路中运用车辆控车方式1和控车方式2均会对车辆闸瓦有轻微磨损,因此,两种控车方式都存在不合理性,需要进行优化改进,才能实现地铁车辆运用的安全性和经济性。
2 理论分析
2.1 车辆信号系统通讯原理西安地铁3号线采用的是西门子信号系统,TCMS(车辆控制系统)是大连电牵研究所研制的产品,其中,两者的通讯方式采用总线式RS485串行链路(如图1所示),根据合同设定好的串行接口进行信号的互通,TCMS通过MVB网络接收到来自RIOM(远程输入输出模块)的信号,RIOM通过RS485网络接收到来自ATC(自动车辆控制单元)发出的指令信号,然后TCMS进行处理后转至下方被动执行单元,例如:牵引控制系统和制动控制系统。TCMS和ATC之间通讯框图如图所示。
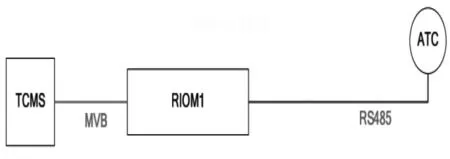
图1 TCMS和ATC通讯图
2.2 电气配合理论分析西安地铁3号线全长39 KM,共设26个站台(其中高架站台7个),线路中有隧道19个,从隧道出来的车辆爬坡度为30‰,其中辅助线35‰,由于坡度较大,对车辆的牵引和制动性能要求很高。西安地铁3号线采用的是阿尔斯通牵引系统[2],车辆编组为4动车2拖车,牵引控制单元可控制牵引系统生成的电制动力,制动系统采用克诺尔公司制动系统,根据合同约定电制动力和气制动之间要有较高的配合度,具体参数和状态可通过实测获得。如,在调试阶段当速度达到7 KM/H时,牵引控制单元会发出电制动退出信号而后延迟200 MS,两个系统同时根据提前设定好的斜率进行消减和增加,直至>2 KM/H左右时由气制动完全接管,电制动完全退出(如图2所示)。

图2 电气配合退出示意图
通过分析调试阶段的测试数据发现,车辆在载重到达AW2时,牵引系统电制动力可以达到完全发挥,不用增加任何气制动,因此可以降低制动系统动作频率及闸瓦磨损。
3 优化方案数据分析
通过上文的实际运行数据和牵引极位转换理论分析可以看出,ATO在运行中,当牵引指令信号转至制动指令信号前,一般会给予车辆相对很小的牵引极位需求(<8%)。根据西安3号线设定调试说明,按照AW2的牵引力计算整车输出力为27 KN左右,对于运行车辆而言,会因整车输出力太小不能满足提升和保持车辆运行速度需要;此外,对于此力直接从牵引转换至制动力需求来说,毫无意义,而且还延迟了电制动力增加的反应时间。
因此,在车辆运行时,尽量避免牵引小极位切换(<3%),同时还要注意在车辆运行时,尽可能将下一个极位转换需求时间延长,使车辆在运行时可使剩余的牵引力全部退出后,再进行下一步动作。
经过上述分析找出问题成因后,与西门子工作人员进行会议沟通取得共识,即以进行软件修改测试数据为依据,若测试与理论相同,可进行修改应用。根据商讨方案,具体测试数据如下:
3.1 数据1当运行速度为43.8 KM/H时,ATO直接需求牵引指令、极位力的需求为1%,而后直接需求牵引指令转制动指令,制动力需求为1%(600 MS),之后制动力需求增加,期间无任何气制动力增加,均为牵引电制动,因为这600 MS为牵引电机励磁及极位转换提供了充足的时间,之后不需气制动力补充,电制动即可正常发挥作用。
3.2 数据2当运行速度为62KM/H时,ATO直接需求牵引指令、极位力需求为0%,而后需求直接转换至制动指令,制动力极位需求为0%,经1.1 s后直接需求增加,从中无任何气制动补充。由于1.1 S可为牵引电机励磁提供充足时间,并且当需要制动力时电制动力可以满足正常发挥需要,不会造成气制动力的补充。
3.3 测试结论通过以上2组数据采集分析可以看出,ATO控车时都是先会给出牵引指令、牵引极位需求,然后转制动指令、制动极位需求为0%或很小(3%左右),持续一定时间(如果之前的牵引极位较小,1.5 S左右),制动指令、制动极位上升。此种状况,在AW2及以下载荷,电制动力是能完全满足制动力需求(80 kph~6 kph),时间仅为电制动按照冲击斜率上升的时间,因此不需要气制动补充,此过程不会发生车辆闸瓦磨损现象。
4 结语
本文以西安地铁3号线车辆闸瓦易磨损为研究对象,运用现场实测与理论分析相结合方法,在找到问题成因基础上,通过对信号系统软件进行合理优化调整,找出了一种较为合适且较优的控车方式。经过西安地铁运营车辆验证本文介绍的优化方案测试结论是正确的,改进后的控车方式不仅能使旅客的乘坐舒适性有所提高,而且减少了车辆运营维护工作量,还有效降低了车辆运营成本。
猜你喜欢
科学家(2021年24期)2021-04-25
科技研究·理论版(2021年20期)2021-04-20
科技研究·理论版(2021年20期)2021-04-20
汽车世界·车辆工程技术(中)(2020年1期)2020-07-09
现代城市轨道交通(2020年1期)2020-02-14
科技创新与应用(2017年26期)2017-09-12
科技创新与应用(2017年1期)2017-05-11
中学生数理化·高一版(2016年4期)2016-11-19
科技与创新(2016年6期)2016-04-21