四旋翼无人机反步积分自适应控制器设计
2021-07-29 03:19王慧东周来宏
兵工学报 2021年6期
王慧东,周来宏
(1.包头职业技术学院 数控技术系,内蒙古 包头 014030;2.新余学院 机电工程学院,江西 新余 338004)
0 引言
近年来,无人机在军事、民用和商用领域得到了广泛应用,逐渐成为航空飞行器领域的研究热点[1-5]。其中,四旋翼无人飞行器更成为无人机研究的新宠,相对于直升机和固定翼飞机,具有体积小、质量轻、操控灵活等特点,可完成垂直起降、低空悬停、低速巡航等飞行动作,因此广泛应用于军事侦察、抢险救灾、农林植保、航拍摄影等领域[6-9]。虽然四旋翼无人机具有很多优点,但它是一个欠驱动系统,只有4个控制输入,却有6个控制输出,并且四旋翼系统还具有强非线性、强耦合、强时变性等特点,给飞行控制系统的设计带来了巨大的挑战[10-14]。
国内外很多学者应用线性、非线性及智能控制方法设计了四旋翼无人机控制系统。如Salih 等[15]用PID算法设计了飞行控制器;Besnard等[16]用滑模算法设计了抗干扰观测器,用于抑制飞行中受到的外界干扰;Shirzadeh等[17]基于视觉方法为四旋翼无人机设计了一种神经网络控制器;Erginer等[18]设计了混合模糊PID控制器,用以研究四旋翼无人机的时间延迟问题。这些研究成果使四旋翼的飞行控制系统有了一定改进。
但是,当四旋翼无人机用于执行某些特殊的飞行任务时,其自身参数(如自身质量)会产生较大变化,例如在执行喷洒农药、播种、授粉、灭火等任务时,无人机自身质量会随时间缓慢减小,且减小量可能会达到初始质量的2/3,从而给飞行控制带来严重干扰。之前的研究大多没有考虑四旋翼在这类情况下的应用,而是假设无人机质量为固定值,从而引入了较大的模型参数误差,降低了控制器的稳定性,严重影响了无人机的飞行品质。
本文研究主要针对四旋翼无人机在有质量慢变情况下的应用,基于自适应控制理论设计质量观测器来估计四旋翼的实时质量,并用估计值修正控制系统的质量参数。将质量观测器与经典反步控制器(CBC)结合,并增加了第一类控制误差的积分,提出了反步自适应控制器(BIAC),用于无人机的飞行控制。仿真实验结果表明:当无人机发生质量慢变或质量突变的情况时,BIAC都可以更好地估计四旋翼的实时质量,估计误差为自身质量的5%~8%;ze轴的轨迹跟踪误差也大为减小,相对CBC,ze轴的跟踪误差减小80%左右。表明BIAC能够更有效地对变质量四旋翼无人机进行实时控制,轨迹跟踪精度明显提高。
1 四旋翼无人机动力学模型

(1)
式中:R和N为转换矩阵,

(2)

(3)
四旋翼无人机通过适当改变4个旋翼的转速,产生φ、θ、ψ3种姿态角,并产生相应的运动,如图1、图2所示。图1中,m为无人机质量,g为重力加速度,F1、F2、F3、F4分别为旋翼1、旋翼2、旋翼3、旋翼4的升力,ω1、ω2、ω3、ω4分别为旋翼1、旋翼2、旋翼3、旋翼4的转速。
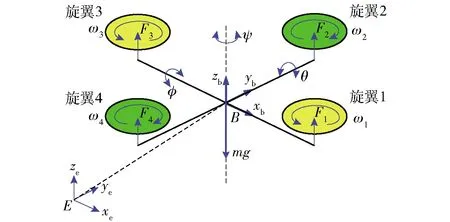
图1 四旋翼无人机结构图

图2 四旋翼无人机运动示意图
为了简化动力学模型,便于求解计算,对四旋翼系统做出如下假设:
1)四旋翼无人机的机身是严格对称的刚体。
2)无人机的几何中心与质量中心重合。
3)忽略飞行中的桨叶挥舞和外部干扰。
利用牛顿定律和欧拉方程,可以得到四旋翼无人机动力学方程为
(4)
式中:Ff、Fd和Fg分别为平动力、平动空气阻力和重力;I、Mf和Md分别为转动惯量、转动力矩和空气阻力力矩向量。(1)式~(3)式代入(4)式,并考虑假设条件,可整理得到无人机非线性动力学模型如下:

(5)
式中:Jr为电机转动惯量;Ixb、Iyb、Izb分别为无人机绕xb、yb、zb轴的转动惯量;kdxb、kdyb、kdzb分别为无人机沿xb、yb、zb轴的空气阻力系数;l为旋翼中心到机体坐标系原点的距离;kdmxb、kdmyb、kdmzb分别为无人机沿xb、yb、zb轴的空气阻力矩系数;Ui(i=1,2,3,4)为控制输入,
(6)
b为U1、U2、U3与转速之间的转换系数,d为U4与转速之间的转换系数;ωr为电机转速差值,
ωr=ω2+ω4-ω1-ω3.
(7)
定义控制输入向量为
(8)
式中:uxe、uye为虚拟控制输入。
2 CBC控制器设计
由于四旋翼无人机飞行速度较低,空气阻力Fd和空气阻力矩Md对模型精度的影响可忽略,在地球坐标系Exeyeze下建立四旋翼系统的非线性动力学方程为
(9)
式中:


(10)
式中:
(11)

步骤1引入第一类跟踪误差向量
(12)
式中:e1、e3、e5、e7、e9、e11分别为x1、x2、x3、x4、x5、x6的第一类跟踪误差。
选择Lyapunov函数为
(13)
对V1按时间求导,有
(14)
为稳定E1,引入函数
(15)
式中:K1为参数向量,K1=[k1k3k5k7k9k11],k1、k3、k5、k7、k9、k11均为正常数。
(16)
步骤2引入第二类跟踪误差向量

[e2e4e6e8e10e12]T,
(17)
式中:e2、e4、e6、e8、e10、e12分别为xj,j=1,2,…,6的第二类跟踪误差。对E2按时间求导,有
(18)
选择Lyapunov函数为
(19)
对V2按时间求导,有




(20)
步骤3为了使E2稳定,选取控制律Uc为
(21)
式中:K2为参数向量,K2=[k2k4k6k8k10k12],k2、k4、k6、k8、k10、k12均为正常数。用Uc代替(20)式中的U,则V2的导数可以改写为
(22)

3 BIAC设计
对于存在质量慢变的四旋翼系统,基于自适应控制理论设计了质量观测器,用于估计无人机的实时质量,并在反步控制方法基础上增加第一类误差的积分,设计BIAC。考虑系统质量仅与控制输入uxe、uye和U1有关,因此质量观测器仅作用于控制系统的位置控制器,如图3所示。

图3 四旋翼无人机控制方案
BIAC的设计过程如下:
步骤1将(21)式中uxe、uye和U1的质量m替换为估计质量并引入误差积分,可以得到
(23)
(24)
步骤2定义系统质量的观测误差为
mδ=m-.
(25)
由于系统质量缓慢变化,质量变化对时间的导数近似为0 kg/s,则mδ对时间求导,得
(26)
步骤3选择新的Lyapunov函数为
(27)
式中:km为质量自适应参数。
V3对时间求导,得
(28)
步骤4令
(29)
为了使质量观测误差mδ收敛,令对时间的导数为
(30)
(31)

控制律(21)式中的位置控制律替换成(23)式,可以得到BIAC的控制律为
(32)
式中:P为误差积分向量,P=[p1p3p50 0 0]T。
由此可得BIAC的姿态控制律为
(33)
4 仿真结果及分析
为了验证BIAC对变质量四旋翼无人机的控制效果,在MATLAB/Simulink软件环境下进行轨迹跟踪的仿真实验。期望轨迹为地球坐标系Exeyeze下Exeye平面的圆形轨迹,ze轴为固定高度2 m,期望轨迹表达式为
(34)
设置初始值xe0=4 m,ye0=6 m,ze0=2 m,仿真时间为20 s.系统的初始质量为0.65 kg,质量的变化量Δm=-0.02×t(kg),t为仿真时间,施加外部周期干扰力fxe=fye=fze=0.2×Nsint.仿真结果如图4和图5所示,质量估计结果如图6所示。
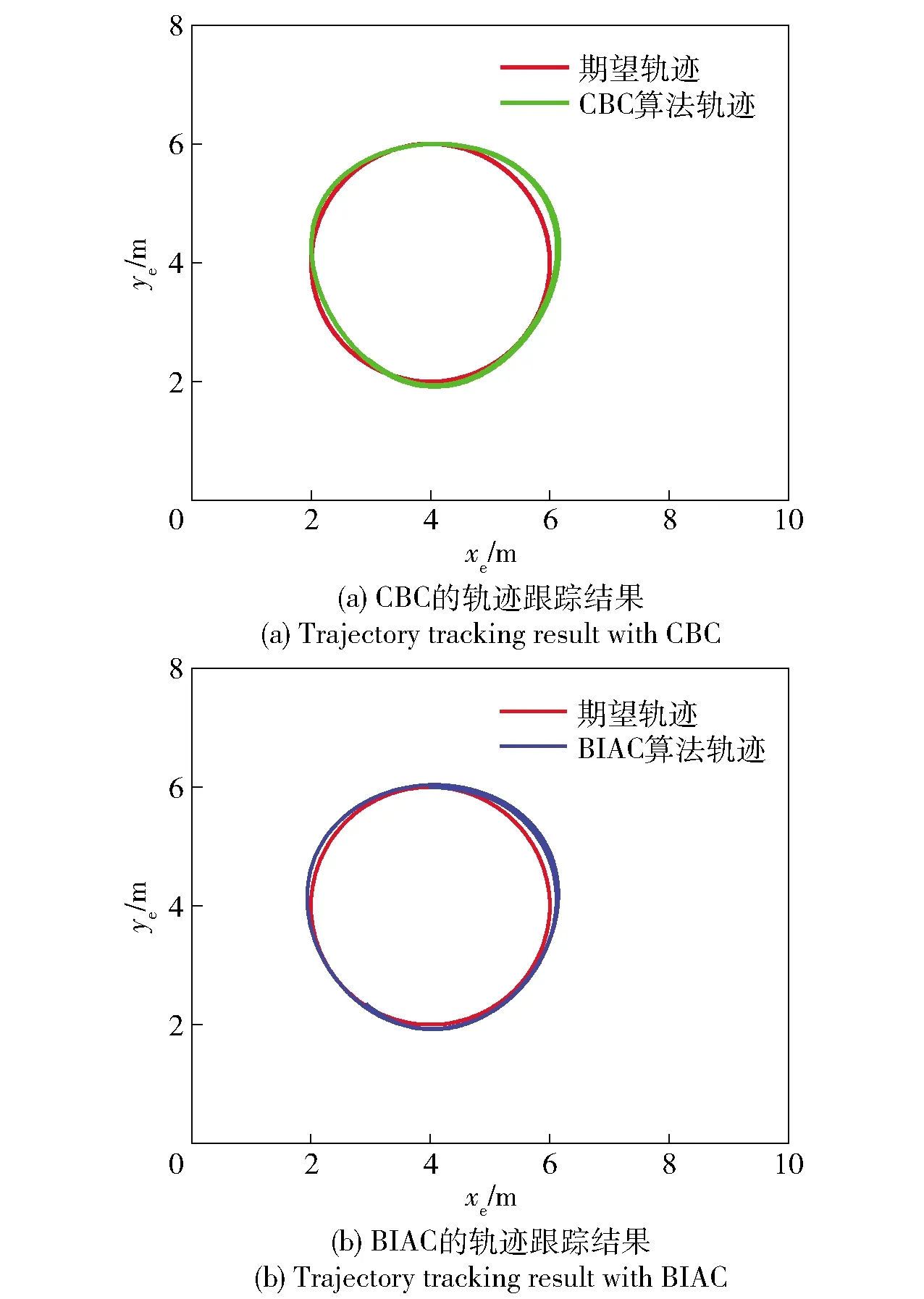
图4 Exeye平面的轨迹跟踪
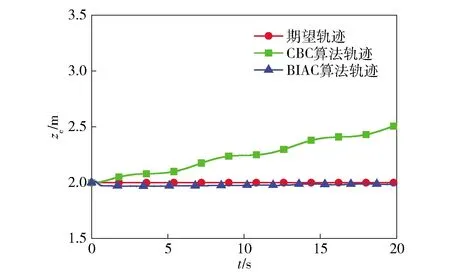
图5 ze轴的轨迹跟踪
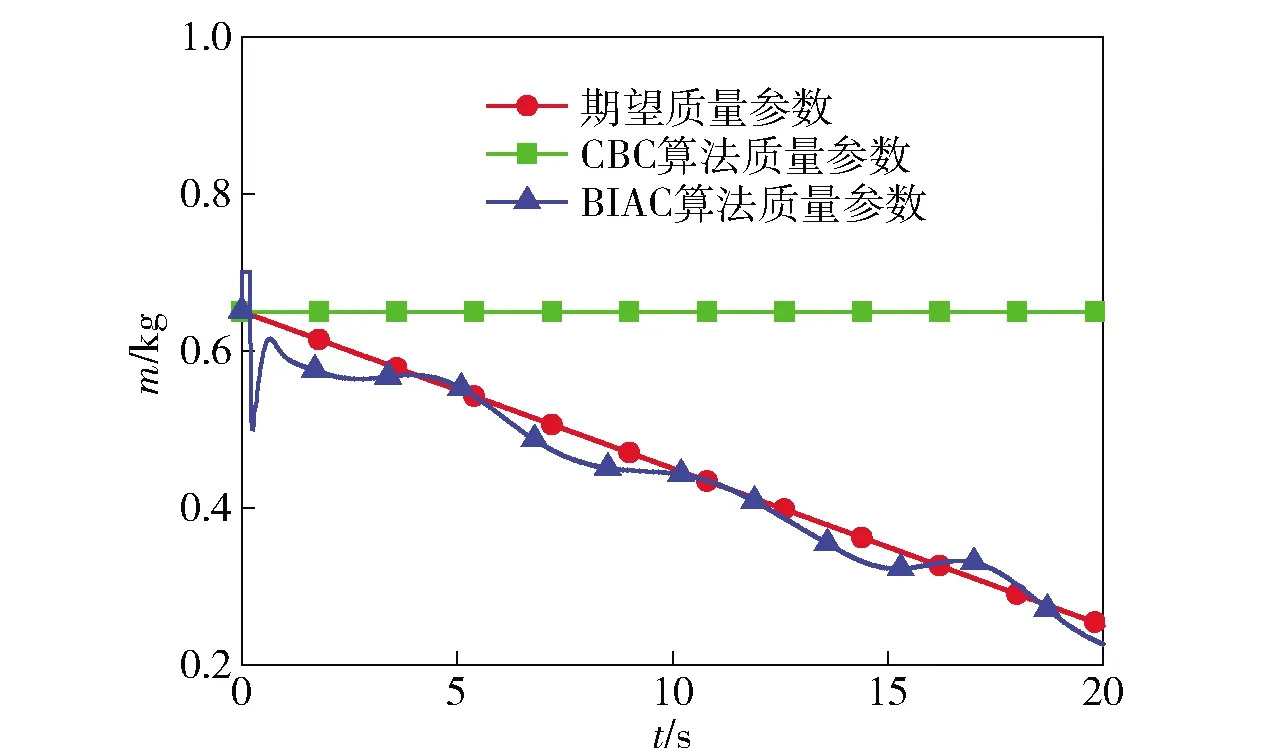
图6 四旋翼无人机的实时质量
从图4(a)、图4(b)可以看出,在Exeye平面内,CBC和BIAC都可以使四旋翼无人机较好地跟踪预定轨迹,可见无人机的质量变化对xe轴方向、ye轴方向的控制影响不大。由图5可知,在ze轴方向,由于系统质量一直设置为初始值0.65,质量误差随时间累积,用CBC得到的跟踪误差逐渐增大;由于使用质量观测器估计并修正了系统实时质量,BIAC的跟踪误差随时间逐渐减小。在20 s内ze轴的平均跟踪误差,BIAC较CBC减小了89%.
从图6中可以看出:用BIAC得到了系统质量估计值,在初始阶段经历了短暂的波动后,逐渐逼近系统的真实质量;受到外部周期干扰的影响,质量估计误差也呈现出周期性振动,但振幅不大,表明在引入误差积分后,质量观测器的鲁棒性得到了提高;20 s内系统质量估计的平均误差,为系统自身质量的5.2%.
当无人机在仿真第5 s时产生质量突变,质量的变化量Δm=-0.3 kg,仍然对无人机施加外部周期干扰力fxe=fye=fze=0.2×Nsint,此时ze轴的轨迹跟踪和无人机实时质量结果如图7、图8所示。由图7可以看出:在无人机发生质量突变后,CBC控制律的位置误差产生了突变,并且稳态误差没有随时间减小,表明质量突变使控制精度大为降低;BIAC仍然能够稳定地跟踪ze轴轨迹,稳态跟踪误差没有发生突变;20 s内BIAC的ze轴平均跟踪误差较CBC减小了71%.由图8可以看出,BIAC得到了系统质量估计值收敛于系统的真实质量,20 s内质量估计的平均误差,为系统自身质量的7.6%,最大超调量为29%.

图7 质量突变情况下ze轴轨迹跟踪

图8 质量突变情况下四旋翼无人机的实时质量
5 结论
本文基于自适应控制理论设计了质量观测器,用于估计四旋翼无人机的实时质量,与CBC相结合,并在位置控制器中增加了第一类控制误差的积分,提出了BIAC,用于无人机的轨迹跟踪控制。仿真实验结果表明,质量观测器可有效地估计无人机的实时质量,并有较强的鲁棒性,通过实时修正质量参数降低了无人机ze轴的轨迹跟踪误差。因此,对于存在质量慢变或突变的四旋翼无人机系统,BIAC都能够更好地完成轨迹跟踪任务,跟踪精度明显优于CBC.
目前的研究只使用仿真方法对控制器进行了验证,没有对控制参数进行实际整定;在未来的工作中,将利用四旋翼无人机试验平台验证并优化本文提出的控制算法。
猜你喜欢
火力与指挥控制(2022年6期)2022-07-25
计算机仿真(2021年3期)2021-11-17
北京航空航天大学学报(2021年9期)2021-11-02
北京航空航天大学学报(2021年6期)2021-07-20
小天使·三年级语数英综合(2018年6期)2018-06-13
创新作文(1-2年级)(2016年12期)2016-12-26
中学生数理化·八年级物理人教版(2014年1期)2015-01-09