水利水电工程耙斗清污研究与应用
2021-07-29 08:13陈佛生
广东水利水电 2021年7期
陈佛生
(广东江海机电工程有限公司,广东 广州 510500)
1 概述
水资源是绿色资源,广泛应用于水利水电等行业。我国在水资源利用方面已取得巨大成绩,但是水资源利用过程中还存在污物堆积所引起的效益损失[1-2]、安全隐患、环境污染等问题,如水利水电工程拦污栅前污物的堆积,不但容易引起水头损失,还给拦污栅及机组运行带来严重安全隐患。目前使用的耙斗式清污机,普遍存在耙斗对污物的适应性差和清污效果不好的问题。
2 水利水电工程污物特点及清理方法研究
2.1 针对污物多样性、形状及堆积状态不规则特点的解决方法
开放式的水资源利用工程中,其水流距离较长,区域多样,流动过程中汇集了泥沙、杂物、树干、树根、石块、动物尸体、城市垃圾等各种各样,形状毫无规则的污物。在复杂的水流流态、流速等因素的共同作用下,在拦污栅前形成毫无规则的堆积。
解决方案:一种是加大耙斗开度,耙斗在打开状态下,一定范围内的污物能被耙斗耙起来。耙斗的开度越大,对污物的不规则形状、堆积状态适应性越强,水流方向上越大范围内的污物被耙起;另一种方法为夹拉法,是耙斗先夹住污物,然后通过提升耙斗将污物拉起,该方法需提高耙斗的夹污能力并设置相匹配的启闭力。实际工程中两种方法综合应用,可以取得更好效果。
2.2 针对污物布置不均匀特点的解决方法
由于水具有流动特性,进水口拦污栅前不同位置的水流状态和流速不同,造成不同位置污物堆积的数量和种类各不相同,有的地方多,有地方少。在调研过程中发现,不仅仅是水面污物,水下污物同样存在布置不均匀的现象。
污物分布不均匀的问题可利用手抓物体的原理解决。人在抓物体时,拇指与另外4个手指之间会因为物体的形状、大小、多少有不同的张开度,抓住物体后,所有的手指都与拇指一起对物体施加压力(抓力),每个手指不需要同步抓放、都可以独立压紧物体的对应部位。手抓物体的特点可以指导清污机耙斗的设计,如设计液压耙斗时,可将耙斗设计成动耙和定耙,定耙作用类似于拇指,动耙分段,作用类似于其余手指,每段动耙相互不关联。
2.3 针对水下污物不可见特点的解决方法
除了水面上的漂浮物外,由于污物的密度各不相同,水流通常还携带一些半漂浮物和沉潜污物,污物被阻拦后堆积在水面以下,因此,看似干净的水面,其实在下面堆积了大量的污物。
水下污物的不可见性会导致驾驶员无法观察污物的分布情况,容易给操作带来安全隐患。特别是在分段式清污中,由于1次清污宽度小于孔口宽度,如果在同一清污段内,污物一端多、一端少,污物堆积高的一端必然先阻碍对应端的耙斗下降,位于污物堆积低的一端耙斗则继续下降,将失去平衡,容易导致侧翻,存在较大安全隐患。
有三种方法可以解决因水下污物不可见而引起的操作安全问题:一种是探索在耙斗上安装设摄像头,摄像头可以将水下污物的分布情况动态传输至操作控制室;另一种方法是通过设置荷重传感器防止失去平衡的耙斗继续下降,即在耙斗的起升机构中设置具有欠载(松绳)和超载保护功能的荷重传感器[3]及报警装置,当起升钢丝绳出现拉力较小或松绳现象时,能停止下降,出现超载现象时,停止提升;第三种方法是采用全跨清污。在全跨清污中,由于1次清污宽度与孔口等宽,耙斗能1次清理与孔口等宽的污物,同时由于全跨清污中设有耙斗槽和耙斗的侧向定位装置,可以保证耙斗不会发生翻转。
2.4 针对污物密实性特点的解决方法
拦污栅前的水流具有较大的动能,可将污物紧紧地压在拦污栅上,如果污物不能得到及时清理,堆积的污物会越来越多,在长时间的水流冲击下、不同污物相互穿插,形成密实的结构,并且产生较大的竖向稳定性和承载力,可通过提高耙斗插入污物的能力解决。
衡量耙斗插入污物能力的指标是单位耙齿对污物施加的插入压强。可以从两方面提高耙斗插入污物的压强。一方面是加大耙齿所受压力,另一方面是减小接触面积。
1)如何加大耙齿所受的压力
有两种方法可以加大耙齿所受的压力,一种是加大耙斗的重量,另一种是设置耙斗增力装置。
在耙斗重量方面,自重越大,越有利于插入污物,但加大耙斗重量必然会增加清污机及相关部分的造价,应综合考虑清污效果和设备投资。设计时,耙斗自重应根据工程的类别、清污操作特性和水流状态不同而有所区别。在水流速度较小、以城市垃圾为主的泵站等工程,建议耙斗每米重量所产生的有效下插分力控制在12~18 kN之间,对于动水清污的水电站工程,建议每米有效下插分力控制在20~25 kN之间,水流速度大的宜取大值。
在设置耙斗增力装置方面,可以在耙斗的定耙上设置可伸缩的活动耙齿和液压增力装置[4],清污作业时,待耙斗下降至合适的位置后,操纵液压装置夹紧拦污栅或者顶住水工建筑物,然后通过操纵液压系统来推动伸缩耙齿插入污物,但这种方法存在损坏拦污栅或水工建筑物的风险,有一定争议。
2)如何减小接触面积
从两方面可以减小接触面积,一方面是减小耙齿在污物堆积面上的投影面积,通常是通过调整耙斗的入水角度实现,入水角度越接近90°,插入污物的性能越好。另一方面是设计合理的耙齿结构。
3 一种液压耙斗的研制实例[5]
根据以上研究思路,为保证足够的抓污圧污能力,选用液压耙斗[6-8],应用手抓物体的原理,设计一种动耙分段式液压耙斗。设计前,应根据1次清污宽度的要求,对动耙进行分段,下面以长度为4.6 m(1次清污宽度)的耙斗进行说明。
3.1 机械结构
液压耙斗包括1组整体定耙及安装在其上的行走及导向系统、若干段动耙、开合机构液压系统和开合机构液压油缸[9-10](如图1所示)。

图1 分段动耙液压耙斗结构及运行示意
按每段长1.5 m将耙斗动耙分成3段,每段动耙上设置1条开合液压油缸,动耙通过连接座与定耙形成铰接结构,开合机构液压油缸的油缸端与定耙铰接,活塞杆端与动耙铰接。为保证清污效果,耙斗自重应大于100 kN。如图1所示的液压耙斗应用于拦污栅安装倾角为75°的工程,开耙下降过程中,定耙与拦污栅栅面平行,动耙具有86°的入水角度。
3.2 开合机构液压系统[10-11]
与图1对应的液压系统如图2所示,其控制逻辑是液压油通过齿轮油泵和单向阀加压后,经中位机能为“M”型[12]的电磁换向阀直接进入每段动耙的液压油缸。液压油进入液压油缸的先后顺序及多少由油路阻力和液压油缸的背压所决定,油路阻力小或液压油缸背压较小的优先进入,反之后面进入。当其中的一个动耙抓取较大或较多污物时,液压油缸伸出量较小,压缩污物后其背压增大,液压油停止或减少进入,更多的液压油进入其他背压较小的液压油缸,使未压紧污物的动耙上的液压油缸继续伸出,直至耙斗压紧污物,然后通过电接点压力表[13]和溢流阀调节,最终使所有的液压油缸压力平衡并达到设定压力,电磁换向阀回到中位,电动机停止工作。耙斗闭合过程中不需要任何人为干预,每段动耙的开度大小完全依赖于耙斗对污物形状、大小和布置的感应,通过液压系统实现自我调节和适应。
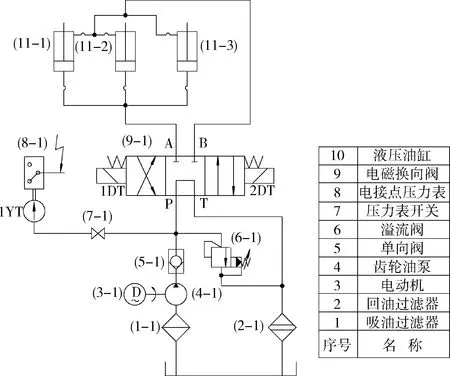
图2 分段动耙液压耙斗液压原理示意
3.3 清污耙齿[14]
耙斗的耙齿是耙斗与污物最早接触的部位,其结构和形状会影响耙斗插入污物的能力和使用与维护的方便性。
为了提高耙齿的插入能力和维护的方便性,研制了一种新型的组合式耙齿。组合式耙齿主要包括耙齿、耙齿防转装置、耙齿安装架、螺母和弹簧垫圈等(如图3所示)。其中的耙齿由圆钢与钢板焊接而成,圆钢的头部加工成圆锥体,以减小与污物的接触面积,提高插入污物的能力。整个耙齿通过螺纹连接安装在耙齿连接架上,耙齿连接架与动耙或定耙的主体结构焊接,提高其维护的便利性。

图3 耙齿安装示意
3.4 清污效果
设计过程中,利用三维实体建模软件调节耙斗的开度和入水角度,使所研制的液压耙斗具有抓污圧污能力强、污物适应性强和插入污物能力强等特点。所研制的分段动耙式液压耙斗已应用于乐昌市张滩闸坝枢纽重建工程和蓬辣滩水电站清污机改造等数10个工程中,均取得了很好的清污效果(如图4所示)。

图4 液压耙斗开度及清污效果示意
4 结语
当前的耙斗式清污机大多依赖于固定的行走轨道,只能清理拦污栅前很小范围内的污物,存在灵活性差、清污效率不高等缺点。在设计耙斗式清污机时,建议考虑以下几个方面:
1)为了获得较大的抓污圧污能力,宜选择液压耙斗。
2)为了适应污物的多样性、形状、结构及堆积的不规则性,尽可能扩大耙斗的开度。
3)为了更好适应污物分布不均的情况,耙斗动耙宜为多段式,每段允许有不同的开度且能独立施加压力。
4)为了提高耙斗的插入性能,需合理设置耙齿的结构和设计耙斗合理的入水角度。
5)清污机除了设置合理的耙斗外,为保证操作安全,应与其型式、起升机构荷重保护等综合考虑。
猜你喜欢
小水电(2022年5期)2022-10-17
水利水电工程设计(2021年4期)2022-01-05
核科学与工程(2021年2期)2021-05-18
科学与财富(2021年33期)2021-05-10
北京汽车(2021年2期)2021-05-07
电站辅机(2021年4期)2021-03-29
科技与创新(2021年4期)2021-03-24
四川水力发电(2020年2期)2020-05-23
疯狂英语·新读写(2018年3期)2018-11-29
——减少水电站拦污栅水头损失探讨
湖南水利水电(2017年6期)2018-01-04