
一种用于运动目标跟踪与测量的目标边缘差分算法研究
2021-08-02 08:03金玉阳杨宝通陶志健
组合机床与自动化加工技术 2021年7期
金玉阳,李 山,陈 冰,杨宝通,陶志健
(西北工业大学机电学院,西安 710072)
0 引言
一个完备的机器人末端检测系统[1]包括4大支撑模块:机器人轨迹NC编程、机器人加工工艺、机器人末端运动测量、机器人关节误差校正和诊断。其中,机器人末端运动测量是对加工工艺的精度保障,是实现机器人加工闭环控制的关键因素之一。而基于计算机视觉的运动末端测量系统因其优异的性能被广泛应用。计算机视觉系统框架分成3个层次,即计算理论层次、表达与算法层次和硬件实现层次[2]。其中前两个层次是围绕目标对象运动分析展开的,而目标对象又是围绕运动检测与跟踪算法[3]进行研究。对于运动检测与分析算法,国内外研究主要侧重于检测算法的应用,邹岗等针对高频声呐图像目标检测问题[4],基于数学形态学算子,提出了一种新的快速目标检测算法;梁路宏等采用多模板匹配的方式来完成对目标的鲁棒性跟踪[5];苏金泷等提出了利用模糊神经系统来计算光流[6],评估三维物体的运动。尽管国内外对该领域的研究非常的活跃,但是算法的鲁棒性、运动识别精度指标却一直是算法转换成生产力的一个不可逾越的瓶颈问题。针对这一问题,本文提出一种目标边缘差分算法实现对运动目标的识别与跟踪,算法主要包括区域分割和运动识别两部分,先,利用基于约束INMF[7]改进型目标跟踪算法完成对目标对象的动态捕捉和区域分割;然后,通过Canny算子对分割图像进行边缘检索,并通过基于改进型边缘帧差分算法实现目标识别,完成对区域内目标对象的运动边缘检测。在对运动目标区域实现有效追踪的同时,满足在线系统的快速测量。算法路线如图1所示。

图1 技术路线
1 基于INMF的区域跟踪算法
本文所涉及的对目标进行特征跟踪可以认为是分割原始目标对象,从而减少后期特征分析量、提高算法执行效率的一种手段。算法的核心是在图像序列中对比搜索与目标外观模型最似样本的过程。
1.1 目标函数及更新规则的构建
INMF的目的是通过当前帧附近的图像序列样本来更新因子矩阵W和H[8-9]。新样本作为向量被增添到Y和H,而基向量W每来一个新的样本都会被更新,基于这种更新方式更适合在线处理。接下来将对矩阵分解的在线更新机制进行研究。
设定Wk和Hk是初始化前k个观测样本获得的最优化分解因子,Lk是关于前k个样本的目标函数,被表示如下,当第k+1个新观测样本Yk+1来临时,标准的重构误差如下:

(1)
为控制每个样本对分解过程的影响程度,这里设定两个权值函数so(α)和sf(α),α为一个常量,它们分别代表当前样本的贡献程度和最近一个样本的贡献程度,新的目标函数如下:
(2)
其中,sj(α)是第j个样本的权值。
(3)
这里,r=1,…,d、so(α)代表先前图像样本参与更新基向量的个数。对于增量非负矩阵分解的优化问题通过梯度下降方法进行求解[10]。
由于关注新增加的图像序列样本可以更好的对目标外观变化进行线性表示,因此INMF算法提高计算效率的同时降低了存储负担,便于实现在线数据处理[11]。
1.2 识别目标模型的构建
为减少外观模型受到噪声因素的干扰,引入L1范数,公式(15)重新定义如下:
(4)

考虑到NMF分解[12]是一个获得基和系数矩阵迭代求解优化的过程,这里将另一个L1范数添加到方程:
(5)
其中,β是一个正则化参数,对稀疏项进行惩罚。α和β能够调节第一个重构误差项和两个正则项之间的关系,转化成优化问题来解决。
1.3 优化求解策略
为了求解基于稀疏NMF的目标表示模型,这里给出一种新的迭代算法。迭代过程中需要对其中一个参数H或E进行参数固定,同时对另外一个参数进行优化。图2为优化求解策略流程。

图2 优化求解策略流程图
2 改进型边缘帧差分算法
目前,无论是二帧差分还是三帧差分算法都容易产生“空洞”现象[13]。当“空洞”出现在目标边缘处时,就会使得二值化目标图像造成大量的边缘缺失,使得很难得到完整的检测结果。针对这一问题,本文将对其进行研究。
2.1 传统帧差分算法的基本原理
帧差分法[14-16]是通过二维投影图像在相邻两帧或几帧间的灰度差,获得三维场景中目标对象的运动信息。其工作流程如图3所示。

图3 帧差分法的工作流程
fk和fk-1分别是时刻k和时刻k+1采集到的两幅图像。
2.2 改进型边缘帧差分法的关键问题研究
传统的边缘差分算法检测结果容易出现“空洞”现象[17](后文简称“空洞”),而“空洞”必然引起局部边缘信息丢失,噪声点多,从而导致目标对象的检测精度降低甚至发生识别错误。如图 4所示。为避免“空洞”的出现,本文提出一种基于追踪对象速度的帧数可变型边缘帧差分算法。

图4 帧差分法产生的空洞现象
2.2.1 对比策略制定
假设在连续的N帧内目标的每个部分都发生了运动,此时要判断当前帧的目标边缘位置,则需对比连续N帧边缘图像中同一位置的像素值。因此制定对比策略如下:
(1)若该位置像素值均为1,则当前帧的该点为背景边缘点;
(2)若该位置像素值均为0,则消除背景边缘;
(3)若该位置像素值不全为1,则其像素值由当前帧该位置的像素值决定。
通过该操作,能得到当前帧目标的精确边缘并将背景边缘消除。边缘对比差分算法表达式为:
(6)
其中,Fi(x,y)为第i帧Canny边缘检测图像,Dk(x,y)为当前帧边缘对比差分运算结果。
2.2.2 基于运动速度的采集帧数确定方法
图5所示为20×20的边缘对比差分示意图,其中,N取3。设目标在N帧内首次发生运动,在边缘对比差分过程中,若N=4,如图 5 f所示,此时获得的目标边缘较完整,但是随着N的增大,运算量会增加;若N<4,此时得到的目标边缘将严重缺失。因此,需要合理确定N值。


图5 边缘对比差分示意图(N=3和N=4)
为精确采集目标位置信息,并不导致计算提升,本算法追踪对象选择球形靶球。可以通过三帧差分算法得到第k帧与第k+1帧图像的运动目标,分别计算求取直径和圆心位置。
如图6将目标对象沿Xw方向分为N份,每份均近似为一个矩形。则该目标对象的面积可以表示为:

(7)
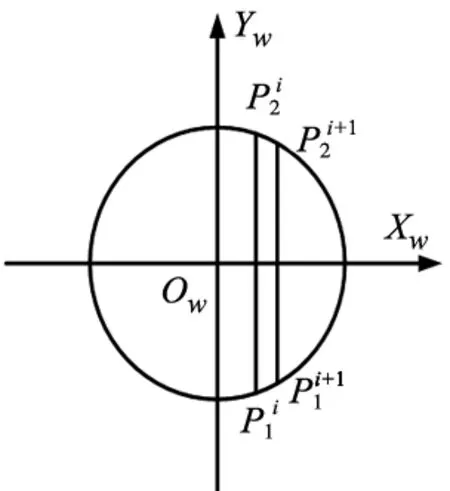
图6 对目标进行面积积分
将投影关系式带入上式得到:
(8)
其中,S1表示目标对象在单目摄像机上的成像面积由此可反解得到目标对象d的计算公式:
(9)
此刻目标对象圆心的坐标为:

(10)
设第k帧目标对象半径为dk,形心坐标为(xk,yk),第k+n帧目标对象半径为dk+1,形心坐标为(xk+1,yk+1)。则两帧运动目标形心之间的位移向量S(xl,yl)(单位为像素点数)。第k帧目标的瞬时速度v(单位为像素/帧)为:
(11)
假定第k帧对象清晰可靠的前提下,对目标对象的运动情况进行分类讨论:
① 当dk≠dk+1·δ成立(δ一般取1~1.3),则可以判定第k+1帧图像由于光照运动模糊等原因,使得图像边缘轮廓出错,属于无效图像。


N=n+2
(12)
2.3 改进型边缘帧差分算法性能验证
为验证算法对“空洞”的有效性,接下来对算法进行实验验证。实现流程如图 7所示。图 8为实验过程中参数N和vn的取值情况。可以看出,本文算法能够较完整地获取目标边缘有效消除亮度突变的影响,抑制 “空洞”现象。

图7 实验实现流程

图8 视频2第55帧到第80帧图像序列过程中的 参数vn、v1、N、n取值情况
为进一步评估本文目标检测算法的性能。定义两者的相似度:
(13)
其中,用A表示检测出的目标区域,用B表示真实的目标区域,S(A,B)的值在0-1之间;当A和B完全相同时,S(A,B)取1;反之,A和B差别越大,S(A,B)越接近0。
目标的真实区域手动获得,评价数据从图像序列中随时抽取40帧进行。表 1所示为不同算法的相似度评价结果。

表1 不同目标检测算法相似度评价结果
可以看出,本文提出的改进型边缘帧差分算法获取的目标的相似度指标优于其他方法,其与实际目标轮廓最接近,提取效果最好。
3 综合算法性能实验
3.1 实验具体过程
本文安排三种极端环境的图像序列进行目标跟踪实验,其中包括光线过渡、复杂背景和严重遮挡。这里将与IVT、MILT、OSPT和TLD这4种传统跟踪算法并结合上文提出的改进型边缘帧差分算法进行综合算法性能对比。
3.2 实验结果定量分析
本文采用了两个评价标准:一个是平均中心误差,另一个是平均重叠误差。表 2和表 3分别表示不同算法在六组图像序列上运动结果的平均中心误差和平均重叠误差。

表2 不同跟踪算法的平均中心误差率(单位:像素)
由表2可得:对于光线变化和严重遮挡环境下的图像序列数据,本文的跟踪算法平均中心误差率和OSPT算法几乎接近。该方法基于分块思想的子空间建模对于形态大的变化(如严重遮挡环境下的图像序列)没有表现出比PCA子空间建模的优势。然而,总体上看该方法获得较小的平均中心误差。因此本文的算法和OSPT算法相当。

表3 不同跟踪算法的平均重叠率结果图
结合表3可以看出:该方法的跟踪结果整体高于OSPT算法4个百分点,特别是在处理严重遮挡问题上,远远超过IVT和TLD算法,体现了该算法的稳定性。
4 结束语
本文提出了一种新型目标边缘差分算法,在实现了对运动目标区域有效追踪的同时,满足了在线系统快速测量的要求。首先搭建了一种基于约束INMF的改进型目标跟踪算法,完成对目标区域的动态捕捉和分割。然后利用基于Canny的灰度值特征边缘检测算法完成对目标图像的边缘检测,并设计一种基于改进型边缘帧差分算法实现对目标区域内目标对象的边缘特征提取,避免由于“空洞”现象造成的目标对象边缘丢失;最后,将本文的算法同几种典型的跟踪算法对比发现:在目标被部分遮挡、光线变化和运动模糊环境中,本文的算法均能较好地跟踪目标,并在跟踪精度和稳定性方面有良好的性能表现。
猜你喜欢
小哥白尼(军事科学)(2022年2期)2022-05-25
新世纪智能(数学备考)(2021年5期)2021-07-28
红领巾·萌芽(2019年8期)2019-08-27
中国与非洲(法文版)(2017年10期)2017-11-23
通信产业报(2016年44期)2017-03-13
CHIP新电脑(2016年3期)2016-03-10
信息安全研究(2015年3期)2015-02-28
太空探索(2014年1期)2014-07-10
四川生理科学杂志(2014年2期)2014-02-28
雕塑(1999年2期)1999-06-28
