小展弦比飞翼大迎角状态空间气动力建模
2021-08-03 03:46王延灵卜忱杨文沈彦杰冯帅
航空学报 2021年7期
王延灵,卜忱,杨文,沈彦杰,冯帅
1.航空工业空气动力研究院,哈尔滨 150001 2.低速高雷诺数气动力航空科技重点实验室,哈尔滨 150001
在大气飞行力学中,确定并描述作用在飞机上的气动力及力矩是一项非常重要的任务,传统的稳定导数方法忽略了随迎角变化的气动力响应中的瞬态特性,因此多数情况下无法适用于大迎角非定常气动力建模的需求。严格来讲,气动力及力矩都是飞行状态变量的泛函,大量的试验结果表明,他们不仅与这些飞行状态变量的瞬态值有关,还与这些变量在运动过程中的整个时间历程相关。随着具有高机动性、敏捷性的现代军机的研发,飞机大迎角区域的性能对空中作战优势的建立有着重要的影响,因此针对大迎角区域建立合适的数学模型对于飞行仿真、稳定性分析和控制律设计都有重要作用,并且对于解决飞行安全问题和研究飞机失速和尾旋问题具有重要意义。
已有的非定常气动力模型大致可以分为两类,一类是依据飞机表面流动状态建立的具有特征物理意义的数学模型,包括气动导数模型[1]、阶跃响应模型[2-3]、状态空间模型[4-6]和非线性微分方程模型[7-9]等;另一类是人工智能类模型,包括神经网络模型[10]、模糊逻辑模型[11-12]和支持向量机模型[13-14]等。
人工智能类模型如神经网络具有强大的映射能力,使用范围较广,在非定常建模领域具有广阔的应用前景,但是如何确定最优网络结构成为限制神经网络进一步应用的主要问题之一,隐层神经元过少,不能充分拟合已有试验数据,神经元过多又容易导致过拟合问题,使得模型预测能力下降[15]。而数学类建模方法是以对非定常流动现象和机理认识为基础的,具有特定的物理意义,针对小展弦比飞翼标模这类以涡升力为主导的布局形式,迎角增加到一定程度会导致涡破裂现象的产生,从而引起气动力强烈的非线性变化,大迎角区域的气动性能以及飞机过失速机动时气动力的非线性变化是此类飞机的重点关注领域,也是夺取空中作战优势的主要性能指标。由Goman和Khrabrov[4]提出的状态空间法将气流漩涡破裂时的具体位置等因素作为非定常气动力建模时的状态变量,使得状态空间方法具有明确的气动建模物理含义,Fan[5]在Goman建立的状态空间模型的基础上进一步发展,给出了失速区非定常气动力的状态空间表示法,该模型包括流动分离状态和涡破裂的描述,以及状态和输入变量的气动系数的确定,从而使得该方法能够准确地描述气动力系数对于流动状态和时间历程的依赖,提高了描述大迎角区域非定常气动力的能力。
但是,动态气动力特性与布局形式密切相关[16],对于小展弦比飞翼类布局,涡破裂的发生使得气动力呈现强烈的非线性,因此要求气动模型能够准确描述飞机运动过程中的流动形态变化。目前对于状态空间模型,从模型的建立到模型的检验,再通过机动历程进行预测的工程化体系性应用研究较少,并且已有研究中,状态空间模型对飞机“上仰”和“下俯”过程使用相同的状态参数,即模型更多考虑的是飞机运动过程的整体迟滞效应。
为了更加精细化地描述小展弦比飞翼标模的动态特性,确切地反映其不同运动过程中的流动特性变化,本文在Fan[5]发展的状态空间模型的基础上,根据飞机“上仰”和“下俯”过程中迟滞特性的差异,对原有模型进行改进,最终应用大幅振荡风洞试验数据建立了描述小展弦比飞翼标模大迎角非定常气动特性的状态空间模型,并且通过低速风洞的机动历程试验手段验证了改进后模型的工程实用性。
1 小展弦比飞翼标模
飞翼布局在气动特性、隐身性能和结构强度等方面的优势使其获得较为广泛的研究。为满足未来飞行器气动力试验与研究的需求,并且考虑到超声速飞行的要求,国内自主设计了单前缘、后掠角65°和W形后缘的小展弦比飞翼标模,作为该类飞翼布局的通用研究平台[17],如图1所示。
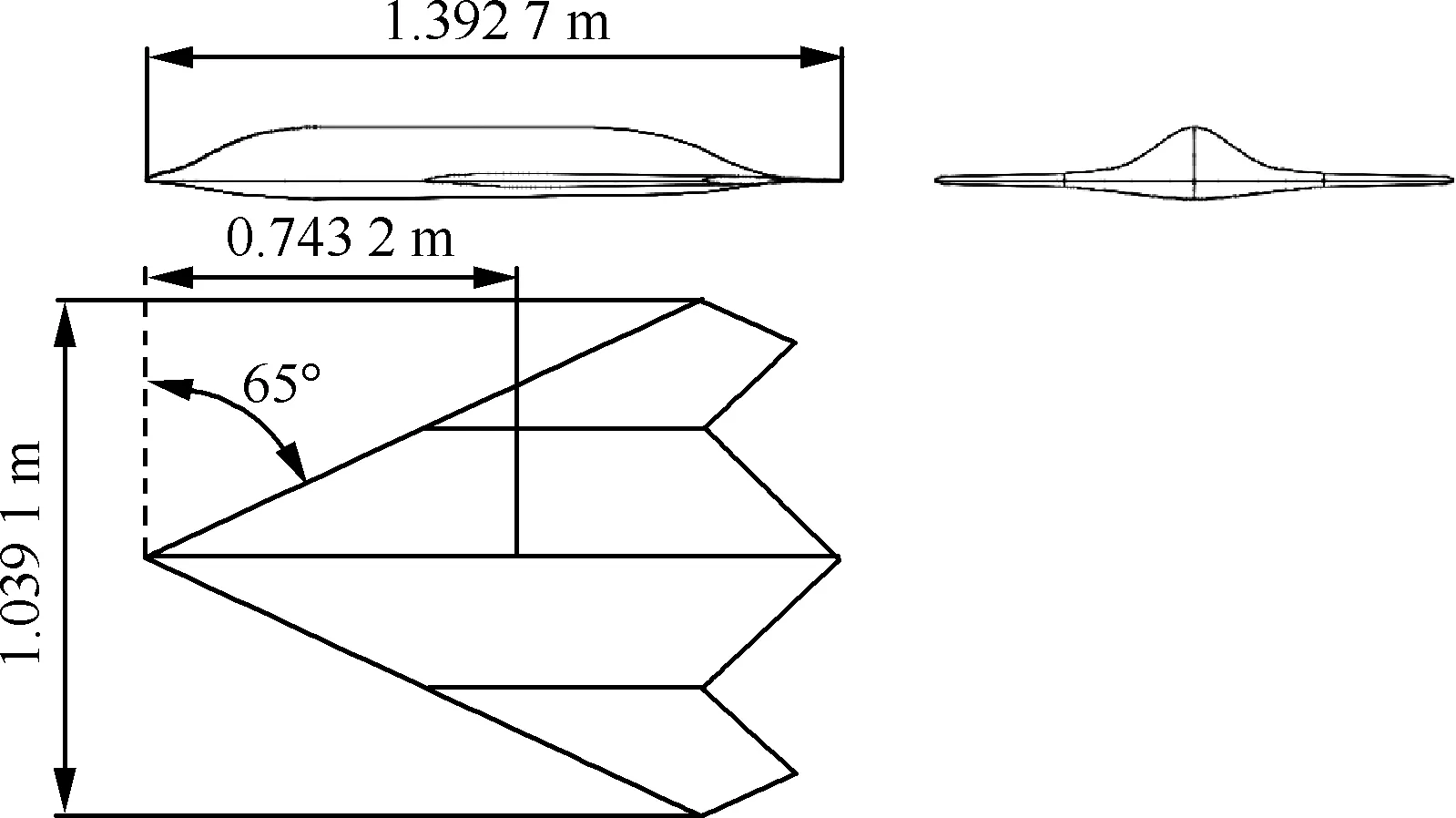
图1 小展弦比飞翼模型布局示意图[17]
2 状态空间模型
飞机做过失速机动时,状态空间模型能够明确地反应飞机表面气体流动的物理含义,其明显的特点是将漩涡破裂或流动分离的位置作为非定常气动力建模的主要状态变量,借助于微分方程即可表达上述流动机理,具有较强的拓展性,具体公式为
(1)
(2)
式中:迎角α和俯仰角速度q作为输入变量;x为无量纲状态变量,表征流动的分离点位置(对于全机流动而言,该变量不再对应一个物理上的实际气流分离点,而可认为是一个关于气流分离位置的等效描述[18]),x∈[0,1],其中,x=0代表完全附着流动,x=1表示流动完全分离状态,对于像小展弦比飞翼这类大后掠、以前缘涡发展和流动为主的布局形式,x=0表征未发生涡破裂,x=1表征涡破裂到达机翼前缘;τ1为特征时间常数,描述气动力瞬时特性;τ2决定着流动分离及再附着带来的总的迟滞时间效应;τ3表征角速度带来的影响;αs为流动分离点为弦长中间点时的迎角;αeff为有效迎角。
气动力模型表达式类似于气动导数模型,只是这里的气动导数依赖于内在状态变量,从而依赖于流场结构。以法向力系数CN为例,具体表达式为
CN=CN0+CNα(x)α+CNq(x)q+Δ2CN
(3)
(4)
式中:CN0为迎角和俯仰角速度为零时的法向力系数;CNα、CNq等导数不再是常数,而是依赖于流动分离或者涡的发展情况,表示为状态变量的二次函数形式,具体表达式为
(5)
可以看出,与传统稳定导数模型相比,此处的气动导数依赖于内部状态变量x,从而依赖于流场结构及其变化的时间历程。式中:ai(i=1,2,…,5)为传统稳定导数值;bi、ci(i=1,2,…,5)代表着流动分离对于相关稳定导数的影响。以上所有未知参数均通过风洞试验数据辨识得出。

已有研究成果表明,Fan发展的状态空间模型能够有效地描述气动力的非定常特性,但针对小展弦比飞翼标模,谐波大幅振荡结果表明,飞翼标模“上仰”和“下俯”过程中迟滞特性存在较大差异(图2,其中f为振荡频率),因此在考虑飞机整体迟滞特性的基础上,需进一步改进状态空间模型,使之能够准确地反映飞翼标模“上仰”和“下俯”过程中迟滞特性的不同,从而提高模型精度。
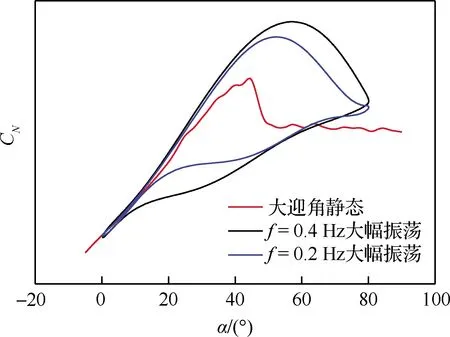
图2 大幅振荡与大迎角静态结果对比
3 状态空间模型改进
在Fan建立的状态空间模型的基础上进一步发展状态空间模型,将飞机“上仰”和“下俯”的过程分别建立状态方程,进一步精细化状态空间模型对于流场结构和流动状态的反映。
状态空间模型具体表达式改为
(6)
(7)
(8)
(9)
(10)
式中:σU和σD分别用来描述“上仰”和“下俯”过程中涡破裂速度的快慢;τ1U和τ1D分别代表“上仰”和“下俯”过程中的瞬时特性;αsU和αsD分别代表“上仰”和“下俯”过程中涡破裂点移动到机翼中间位置时对应的迎角。气动模型表达式保持不变,与式(6)相同。
4 状态空间模型参数辨识
数学模型结构确定后,根据辨识准则和试验数据求取模型中的待定参数,即参数估计问题,这是系统辨识定量研究的核心。参数估计包括辨识准则和优化算法两部分目前工程上应用最为广泛的气动参数辨识方法是最大似然法[19],该方法将参数辨识问题转化为优化问题,通过优化选取气动力模型参数值,使模型输出和实测值的偏差达到极小。
状态空间模型参数辨识采用目前应用最为广泛和有效的最大似然准则作为气动参数辨识准则,应用牛顿-拉夫逊算法作为辨识算法。
初步辨识结果表明,针对状态空间这类非线性较强的气动力模型牛顿-拉夫逊算法容易发散,同时辨识结果受参数初值影响较大,且对于部分初值,牛顿-拉夫逊算法收敛较慢,因此本文首先引进阻尼因子μk,使得Hessen矩阵Ak=G(θk)+μkI正定[19](θk为第k步迭代时的参数变量;I为单位对角矩阵;G、A分别为原始和引进阻尼因子后的Hessen矩阵),为了加快迭代收敛速度和增加初值的适应性,本文沿梯度方向加入了一维精确线搜索方法[20]。
5 非定常气动力建模与验证
基于改进的状态空间模型,采用FL-51低速风洞中完成的大幅谐波振荡试验数据完成了状态空间非定常气动力模型的建立,从而检验状态空间模型结构和辨识算法应用于非定常气动力模型的可行性。
大幅谐波振荡试验中迎角变化规律为
(11)
式中:α0为俯仰振荡平衡角;αA为振幅;ω为振荡角速度。
(12)
式中:N为数据总点数;CN为试验采集数据;CN,max为试验数据最大值;C′N为状态空间模型预测数据。
参数辨识结果表明(表1),飞翼标模“上仰”和“下俯”过程的特征时间常数和涡破裂发生的位置和发展速度均不相同。为了更好地说明状态空间模型中关键参数的物理含义和其对气动力特性的影响规律,以俯仰力矩系数Cm为例,针对表1中的6个参数进行敏感性分析。图3给出了分析结果,可以看出改变“上仰”和“下俯”过程中的状态空间方程参数对气动力的迟滞特性和涡破裂发展的快慢均产生影响,并且影响程度不同,这也侧面说明“上仰”和“下俯”分开建模确实能够更准确地描述飞翼标模运动过程中的流动特性。
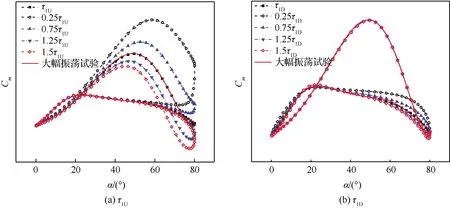
图3 敏感性分析结果

表1 参数辨识结果(f=0.4 Hz)
图4给出了原始Fan状态空间方法和改进后的建模得到的法向力系数CN、俯仰力矩系数Cm与风洞试验结果的对比曲线,可以看出针对小展弦比飞翼标模,改进后的模型能够更好地描述飞机“上仰”和“下俯”过程中涡破裂的迟滞效应对于气动特性的影响。原始状态空间模型预测法向力和俯仰力矩系数的准度误差分别为1%、2.66%;而改进后的模型预测准度误差降为0.82%、1.5%。预测准确度的提高和曲线变化趋势的改善均表明改进后的状态空间模型可以准确的反映飞翼标模“上仰”和“下俯”过程中流动特性的变化趋势,能够更加精细描述飞机非定常运动中的瞬时特性和迟滞特性。这一改进使得状态空间模型适用性更广,可以针对不同的非定常运动过程做出更准确的描述。
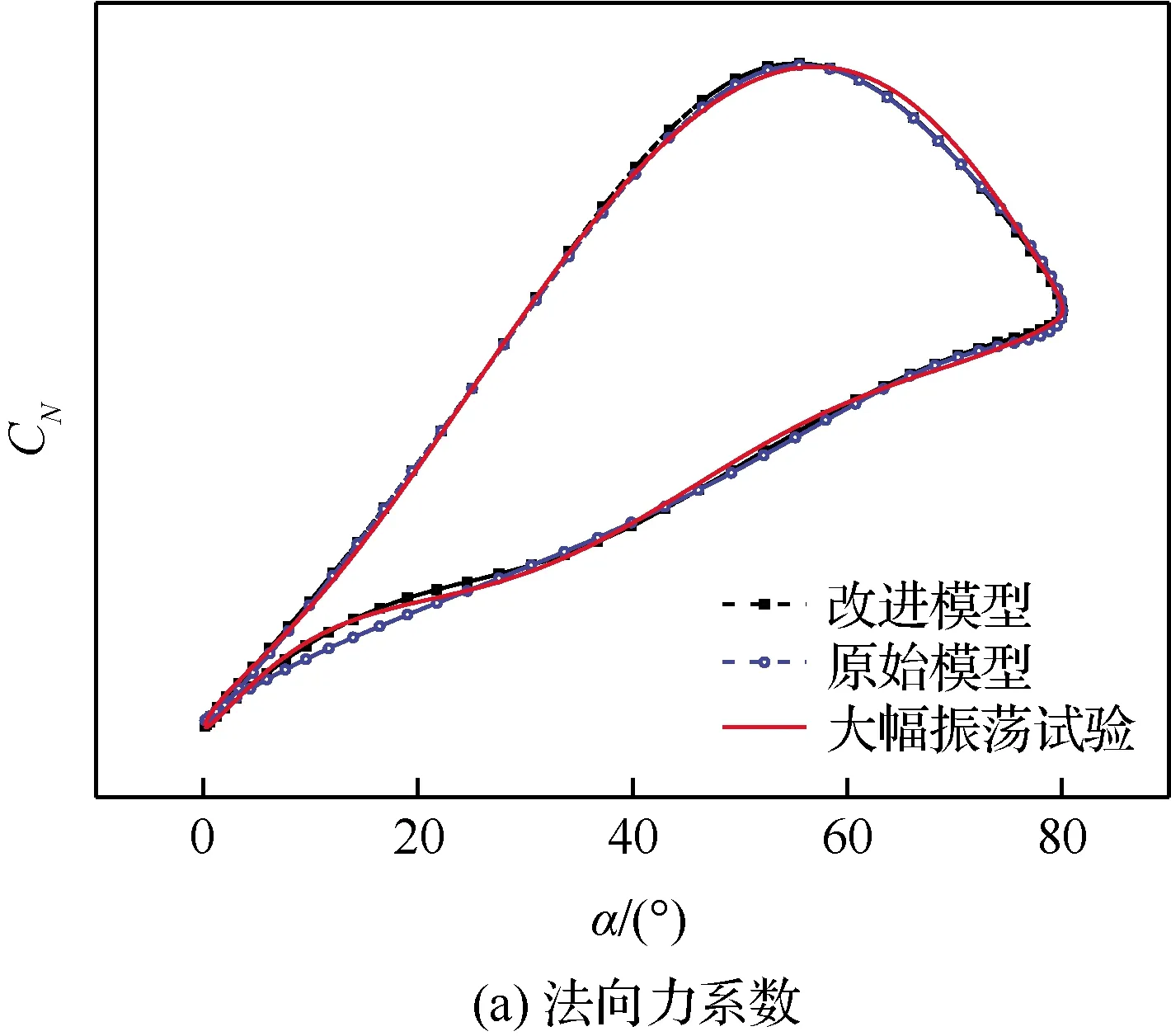
图4 预测结果与风洞试验对比(αA=40°,f=0.4 Hz)
随后,选取平衡角40°、振幅40°,频率分别为0.2、0.3、0.5、0.6 Hz的试验数据作为训练样本,振幅40°、频率0.7 Hz的试验数据作为检验样本,从而检验在超出训练样本包线范围内,状态空间模型的预测能力。从图5可以看出,对于超出训练样本频率范围的检验样本,状态空间模型仍然能预测出气动力的变化趋势和迟滞效应,并且改进后的状态空间模型可以明显地提高法向力和俯仰力矩的预测性能,因此改进的状态空间模型对于超出训练样本范围的检验样本仍然能保持一定的预测准度,对飞机大迎角范围内飞行性能的估计和飞行控制律设计具有一定的参考意义。

图5 预测结果与风洞试验对比(αA=40°,f=0.7 Hz)
以上研究表明改进的状态空间模型对于相同振幅、不同频率的试验结果的预测准度较高,为进一步验证该模型的适用性,将对不同平衡角、不同振幅的俯仰大幅振荡数据进行预测,采用平衡角40°,振幅20°、30°、40°,频率0.2、0.3、0.4、0.5、0.6、0.7 Hz的数据作为训练样本建立模型,利用平衡角30°,振幅30°,频率0.2、0.4 Hz的试验数据作为检验样本进行预测对比。图6和图7给出了不同频率的预测结果图,相比于原始Fan状态空间模型,改进的状态空间模型与试验数据吻合得更好,能够对不同平衡角、不同振幅、不同频率的大幅振荡数据做出准确预测。表2给出了原始模型和改进后的模型预测准度误差对比,可以发现改进后的状态空间模型预测得到的法向力系数和俯仰力矩系数的预测准度误差相比于原有模型均降低25%以上。

图6 法向力系数预测结果与风洞试验对比
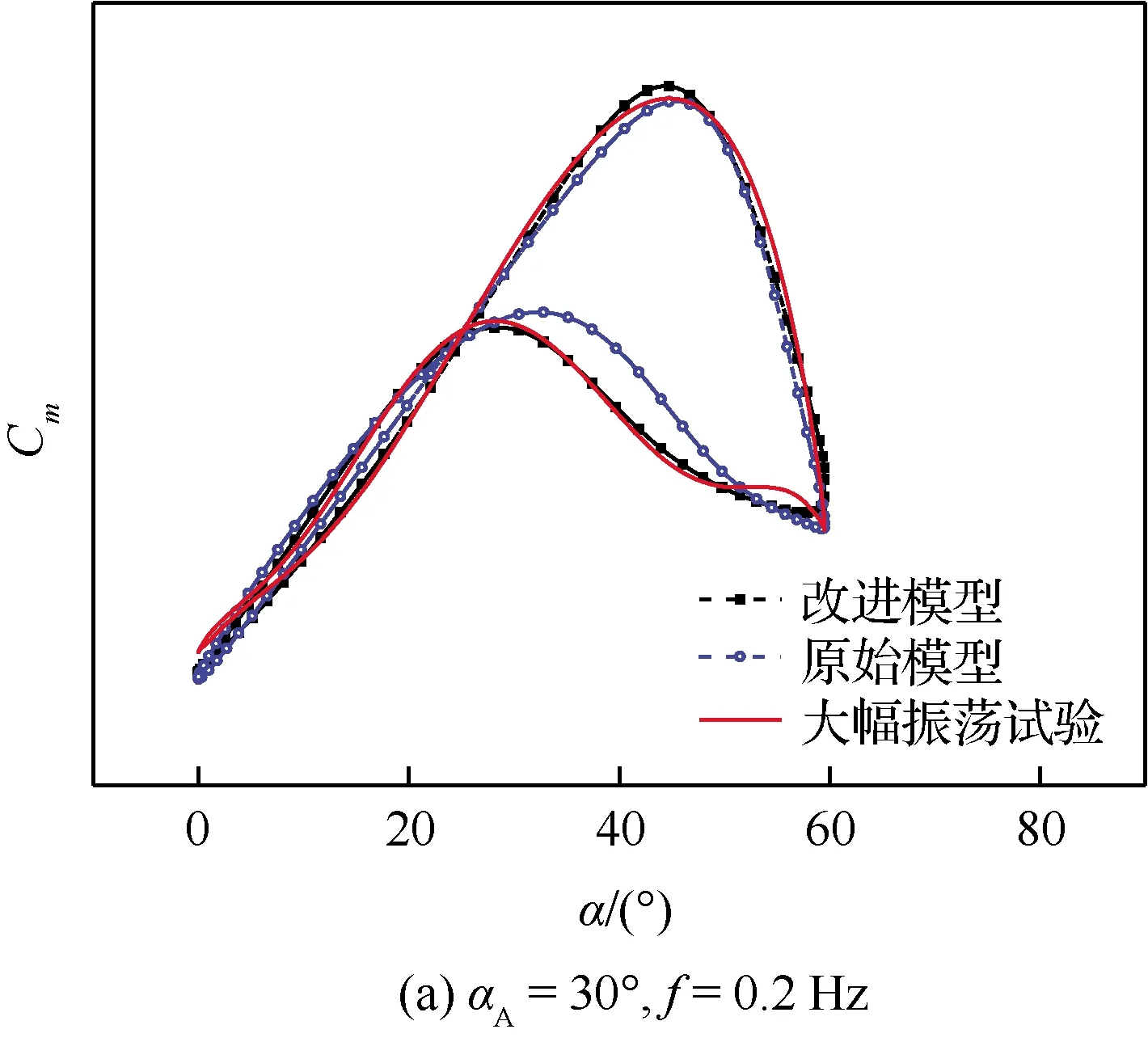
图7 俯仰力矩系数预测结果与风洞试验对比
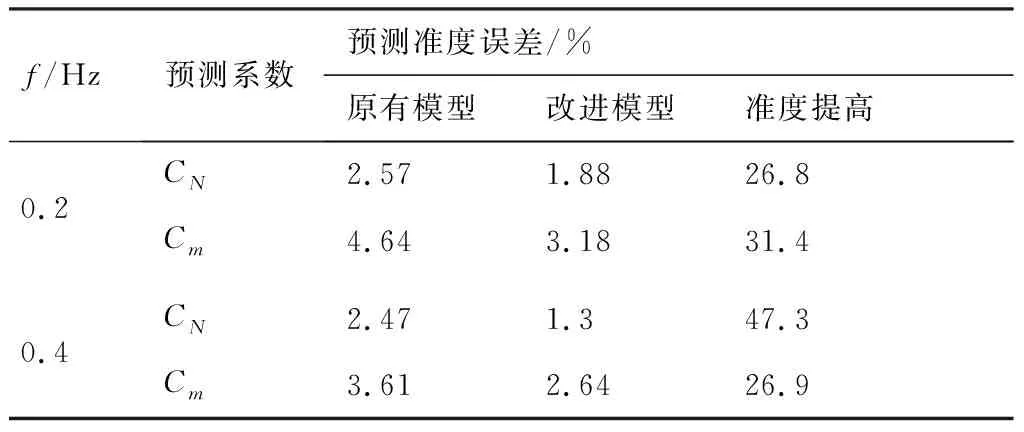
表2 状态空间模型预测准度误差对比
6 典型机动历程验证
为了进一步验证改进的状态空间模型的工程实用性,采用眼镜蛇机动和尾冲机动风洞模拟试验来评估。图8~图9给出了状态空间模型预测的眼镜蛇和尾冲机动历程试验数据的比较结果,可见预测结果与试验结果在变化趋势和量值上均吻合较好。图10给出了眼镜蛇和尾冲机动过程中状态变量的变化结果,可以看出状态空间模型很好地反映了尾冲和眼镜蛇机动历程中涡破裂的发展与恢复过程。

图8 眼镜蛇机动历程预测结果与风洞试验对比
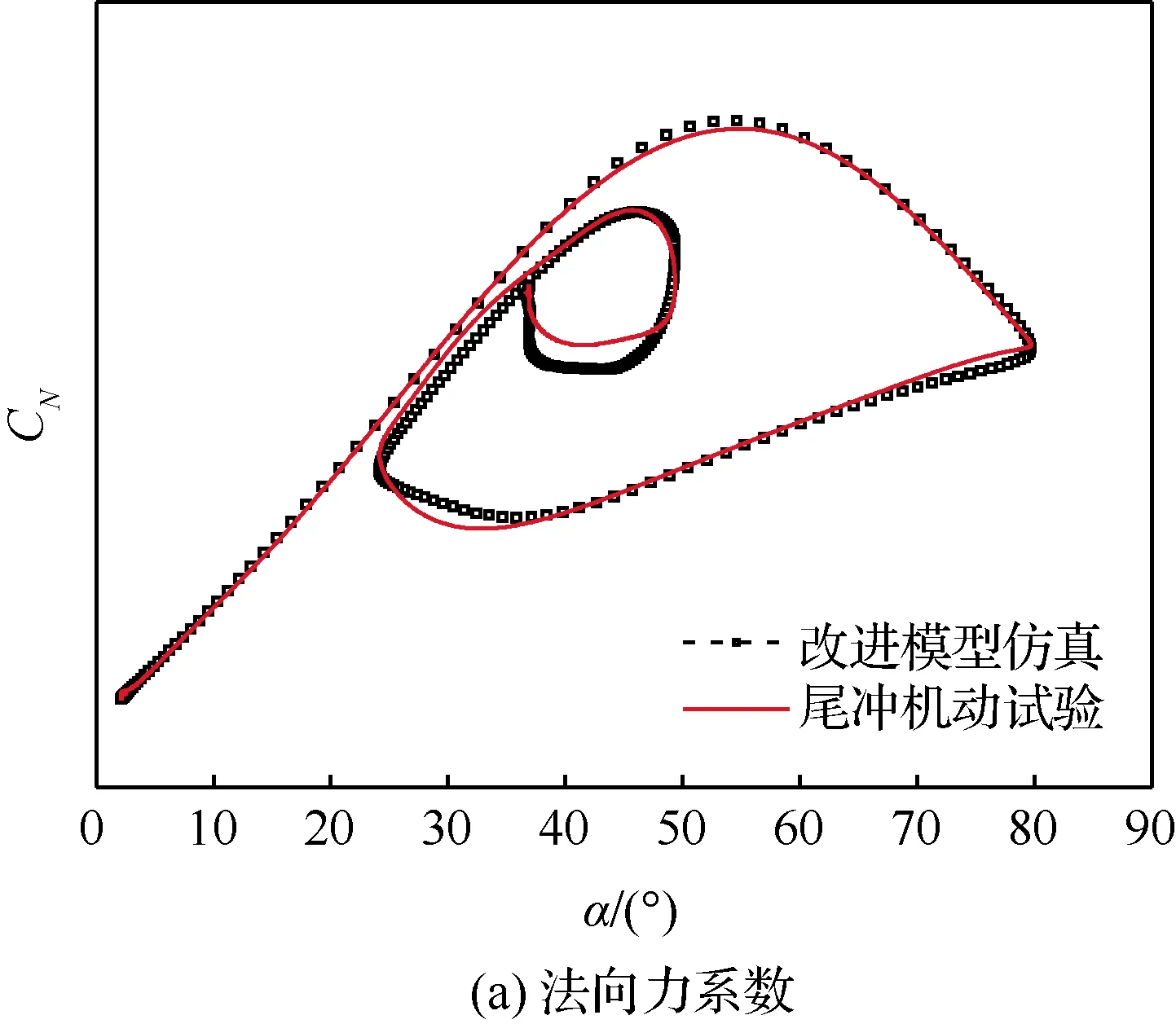
图9 尾冲机动历程预测结果与风洞试验对比
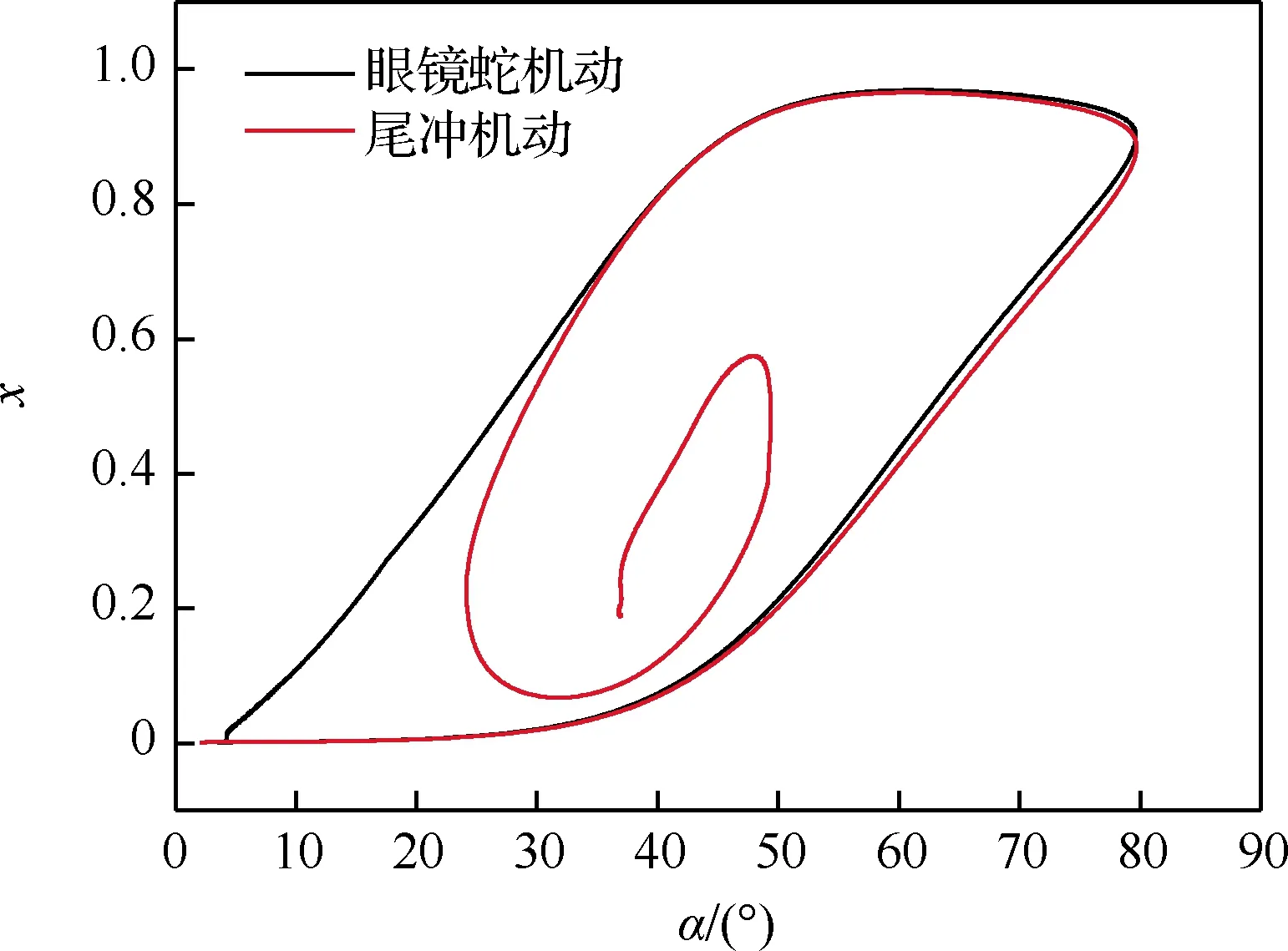
图10 眼镜蛇和尾冲历程中状态变量x的变化结果
根据式(10)得到眼镜蛇机动历程的法向力系数和俯仰力矩系数的预测误差分别为1.02%和2.47%;尾冲机动历程误差分别为2.22%和4.82%。
7 结 论
1)为了更加精细化描述飞机的动态特性,确切地反映不同运动过程中的流动特性变化,本文在Fan发展的状态空间模型的基础上,考虑飞机“上仰”和“下俯”过程迟滞特性的差异对模型进行改进,结果表明改进的状态空间模型预测能力大幅提高。
2)采用风洞典型机动模拟试验验证改进的状态空间模型的有效性和实用性。结果表明:对于小展弦比飞翼标模,改进的状态空间模型能够准确预测飞机不同机动下的非定常气动力特性,具有较强的工程实用性。
3)添加阻尼修正和沿梯度方向加入一维线搜索使得牛顿类辨识算法具有良好的收敛性,适用于面向工程的气动力建模研究。
猜你喜欢
空军工程大学学报(2022年3期)2022-07-13
应用数学和力学(2022年1期)2022-02-18
北京航空航天大学学报(2021年6期)2021-07-20
环球时报(2021-01-07)2021-01-07
西部论丛(2020年2期)2020-10-21
振动工程学报(2018年5期)2018-01-04
科技创新与应用(2017年18期)2017-06-27
湖南大学学报·自然科学版(2015年5期)2015-06-16
计算机辅助工程(2014年5期)2014-10-30
现代电子技术(2014年16期)2014-08-20