太阳能无人机能源系统的多维耦合建模
2021-08-03 03:50高明余伟臣王杉杉王荣闯石健将
航空学报 2021年7期
高明,余伟臣,王杉杉,王荣闯,石健将
浙江大学 电气工程学院,杭州 310027
太阳能无人机作为一种新颖的高空飞行器,因其无污染排放、理论续航时间长等优点,受到多个飞行器制造企业和科研单位的广泛关注[1-2]。它以柔性高效的光伏电池组件替代氢动力或汽柴油活塞动力装置,直接将可再生的太阳能作为无人机的动力能源,这完全改变了无人机能源系统的构成形式,呈现出明显的全电化特点,这也使得更多的电气领域专业人员参与到太阳能无人机能源系统及能量管理器的研究当中[3-4]。
与地面光-储发电系统相比,太阳能无人机的能源系统具有类似的硬件构成,均由通过导线互连的光伏电池、蓄电池和电源控制器组成[5]。但是地面光-储系统的运行,尤其是光伏电池的运行,仅受到地表太阳辐照和地面气温的影响;而太阳能无人机能源系统的运行不仅受无人机所处海拔的太阳辐照和气温影响,同时自身飞行姿态的改变也使得布置在机翼上的光伏电池受光角度发生变化,从而影响光伏电池发电功率。能源系统的运行与大气环境和飞行姿态间所呈现出的强耦合特征,使得太阳能无人机的能源系统和能量管理器设计,尤其是能量管理算法的开发和验证工作与地面系统相比更为复杂,对于能源系统建模的准确性要求也更高。
国内外对于无人机能源系统的建模研究已有一定成果:文献[6]给出了太阳能飞机的一套总体设计方法,其中解释了各个主要模型之间的基本关系;文献[7-8]以质量为耦合点,建立了太阳能无人机的质量与能量平衡模型,可作为能源系统的基本性能估算依据;文献[9]对影响太阳能无人机光伏电池发电功率的因素进行了定性研究,但是缺少数学表达,对于能源系统设计的指导意义仍然有限;文献[10]参考太阳能飞艇将光伏电池投影到坐标面,建立了太阳能无人机光伏电池随姿态变化的关系模型,但是仅将偏航角与俯仰角纳入到能源系统建模中,对于滚转角则没有考虑;文献[11]开展燃料电池无人机的能量管理与飞行状态耦合研究,建立了燃料电池无人机的耦合系统模型,但缺少光伏电池的参与,无法直接套用在太阳能无人机中;文献[12]研究混合动力无人机的模糊能量管理策略,并建立了完整的无人机姿态角度与光伏电池的耦合模型,但没有考虑到飞行高度变化对产能和耗能的影响;文献[13]针对太阳能/氢能无人机能源系统,给出了一种耦合设计方法,并开发了一套仿真平台,但未考虑到大气环境和飞行姿态对能源系统的耦合影响,且仿真软件未能与地面实物充分结合,对于提升能源系统验证工作的准确性仍然有限;文献[14]从地理位置、表面温度、飞行日期的角度研究了无人机飞行状态对光伏电池的影响,但忽略了无人机飞行姿态对电池受光量的影响。
由于现有研究中缺少对太阳能无人机能量流的完整模型描述,尤其是完整耦合外部大气环境和无人机飞行姿态变化的建模研究,这不利于太阳能无人机能源系统、能量管理策略设计与验证工作的开展,同样不利于太阳能无人机地面半实物仿真平台的搭建工作与价值体现。本文在上述研究工作的基础上,完善模型中大气环境和飞行行为对能源系统运行的耦合关系,建立考虑外部大气环境和无人机飞行行为的能源系统耦合模型,并通过仿真结果说明不同因素对能源系统运行的耦合影响,最后给出了基于该模型搭建的半实物仿真平台设计方案,为在地面进行太阳能无人机能源系统及其能量管理器的开发与验证工作提供了一条低成本、快速、准确的途径。
1 能量流耦合特性
太阳能无人机的能源系统作为能量产生、储存、变换、调节和分配的系统,保证无人机动力和任务载荷所需能量的不间断供给,实现能量耗用与生产的循环流动,可谓太阳能无人机的“心脏”,其典型构成如图1所示,主要包含3个部分:① 光 伏电池为发电单元;② 蓄电池为储能单元;③ 由开关电源电路和数字控制电路构成的能量管理器。此外,动力负荷在能源系统的建模过程中往往也被考虑进来,这是因为动力负荷是能源系统的主要耗能对象,有时也需经动力装置将多余电能转为高度势能来储能,同时也考虑到动力负荷耗能的结果是无人机的位置和姿态发生了变化,从而又反过来使光伏电池的发电水平产生了变化,形成了能量的闭环回路。

图1 太阳能无人机及其能源系统
太阳能无人机能源系统的运行不仅受到大气环境中光照、温度等因素的影响,无人机的飞行状态也会影响到能源系统的能量获取与耗用。具体的讲,能源系统以电能作为能量的交互形式,但整个能量流动过程则涉及到太阳能、化学储能和高度势能等多种能量形式的变化,具有多异质能流的特点,如图2所示。不同能量流通过电功率的形式间接体现了各自的变化特性,这使得能源系统中电能的变化特性不仅仅与发电、用电装置有关,同时还与其他能量形式所在的维度存在着强耦合关系,包括:

图2 太阳能无人机的不同能流形式
1)外部大气环境
① 太阳辐照随时间流动而变化,同时随无人机的所处位置(经度、纬度、海拔)而改变;大气温度同样与无人机的位置有关,而太阳辐照与温度是影响光伏电池发电功率的主要因素。
② 无人机所处位置的大气密度与气动力、气动力矩和螺旋桨的推力呈相关关系,使得在不同海拔下达到相同作用力与飞行速度所需要的电机功率也有所不同。
2)无人机飞行姿态
① 光伏电池通常布置在无人机机翼上,无人机的飞行姿态(导航角、俯仰角、滚转角)直接影响到光伏电池的受光面与入射光的相对角度,进而影响到了光伏电池的发电功率。
② 无人机的姿态角会影响机体受力与力矩平衡,为了使无人机保持飞行稳定,电机出力也会改变,从而影响能源系统的耗能过程。
为了对太阳能无人机的能量流动过程进行准确的描述,有必要将上述耦合作用考虑在内,建立考虑外部大气环境维度和无人机飞行行为维度的能源系统多维耦合模型。基于该模型可以量化的反映出太阳能无人机中能量流的变化过程,有利于提高计算机仿真解算过程和地面半实物仿真平台试验过程的准确性。
2 多维耦合模型
图3给出了模型的内部耦合关系,整个耦合模型的构成包括:非均质大气环境模型、太阳辐照模型、无人机六自由度运动模型、电机模型、减速器模型、螺旋桨模型、光伏电池模型、蓄电池模型。下面分别建立上述模型。
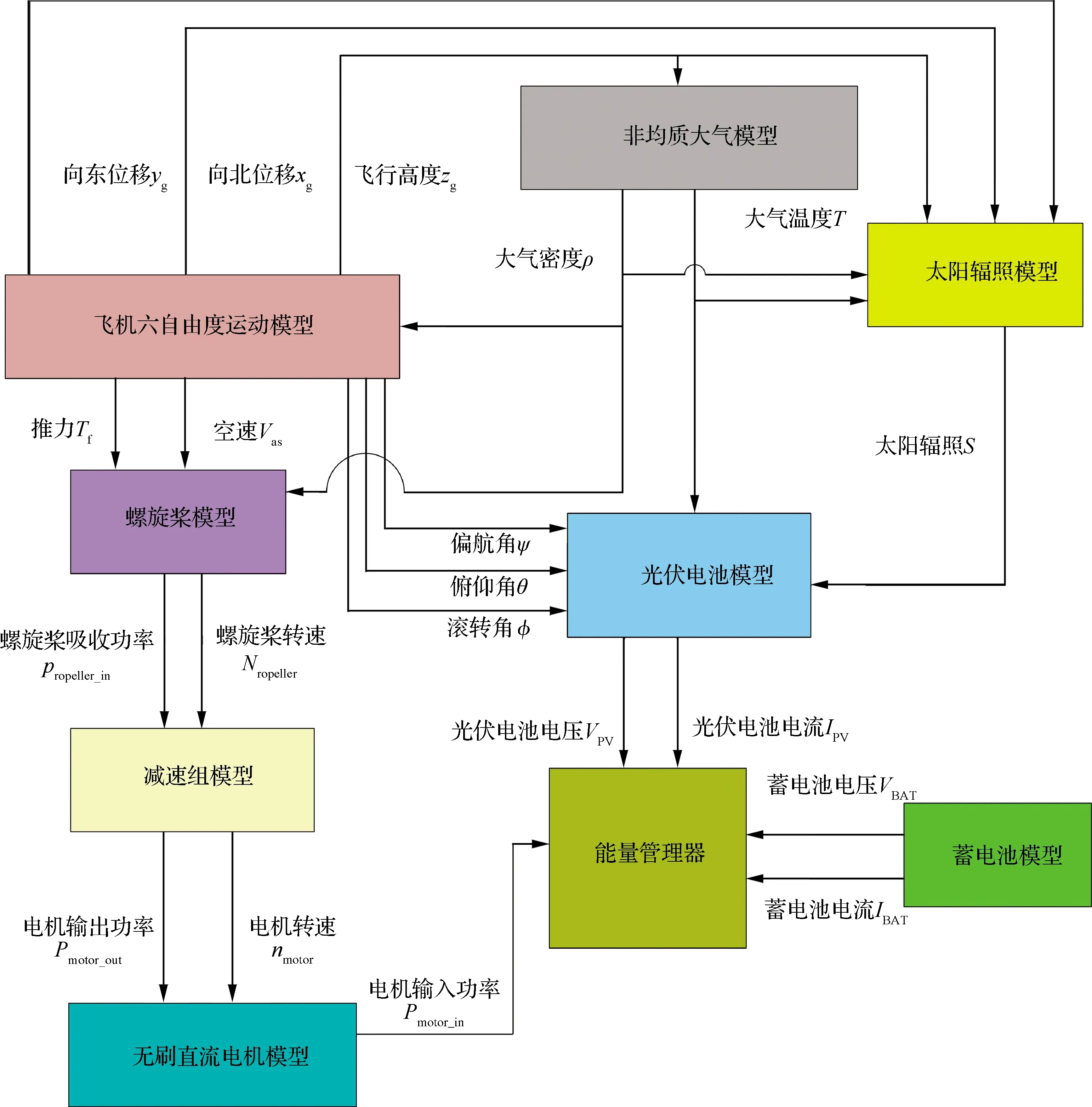
图3 能源系统模型的内部耦合关系
2.1 非均质大气环境模型
太阳能无人机的飞行高度通常设计在几百米到几十千米的高空,在如此大的海拔跨度下,大气的温度变化使得大气分子浓度和大气密度也呈现出明显的分布特点。非均质大气模型在假设大气均匀混合、同一离地高度的大气分子浓度和大气层密度相同的条件下,建立了大气分子浓度和大气密度随高度变化的数学描述[15]。主要使用的大气参数包括:
1)大气温度T
(1)
式中:T为距离海平面高度为zg(单位:km)时的大气温度;T0为海平面平均温度,其值为15 ℃(288.15 K);T11为距离海平面11 km(对流层的平均厚度)的大气温度,其数值为-56.5 ℃(216.65 K);aT为温度随大气高度的降低速率,其数值为6.5 K/km。
2)大气压强pa
(2)
式中:ma为空气平均分子质量,为28.97 g/mol;R为气体常数,为8.314 4 J/(K*mol);g为重力加速度,为9.81 m/s2;p0为海平面的大气压强,为101 300 Pa;p11为距离海平面高度为11 km处的大气压强,为22 631.8 Pa。
3)大气密度ρ
(3)
大气密度与大气压强保持相同的变换关系,因此标准大气的大气密度可表达为
(4)
式中:ρ0为海平面的大气密度,其数值为1.29 kg/m3;ρ11为距离海平面11 km处的大气密度,约为0.297ρ0。
4)大气分子浓度n
大气分子浓度与大气密度成正相关关系,有
n=γρ
(5)
式中:γ为比例系数,取γ=n0/ρ0,n0为海平面的大气分子浓度,约为0.044 64 mol/L。
2.2 太阳辐照模型
大气层对太阳辐照的光吸收作用会随着大气分子浓度的变化而改变,这是导致太阳辐照随海拔高度变化的直接原因。考虑高度变化的太阳辐照模型的建立过程如下。
1)地球-太阳距离系数f
由于地球的公转轨道是一个椭圆,因此一年中地球与太阳间的距离是不断变化的,利用地球-太阳距离系数f来表征这种变化:
f=1+0.033cos(2πnday/365)
(6)
式中:nday为日序,即一年中的第几天,nday=1指1月1日,nday=365指12月31日,以此类推。
2)大气层外太阳辐射G
对于从太阳到地球大气层外的全波长辐射G,可利用太阳常数和地球-太阳距离系数求得
G=S0f=S0[1+0.033cos(2πnday/365)]
(7)
式中:S0为太阳常数,其值为1 353 W/m2。
3)大气层内太阳辐照S
对于地球大气层内的全波长辐射S,可通过式(8)计算[15]:
(8)
式中:C体现了非均质大气环境下的大气层光吸收作用;A为大气层的平均摩尔吸收系数,其取值与天气状况和大气层的分子浓度与大气层高度有关,可通过式(9)求取:

(9)
式中:βa为大气层吸光度,晴天时βa<0.08;多云时0.08<βa<0.12;阴天时βa>0.12。n11、n20、n50分别为海拔为11、20和50 km处的大气分子浓度;h11、h20、h50和h100分别为海拔11、20、50和100 km(通常认为海平面以上100 km为大气层与外太空的分界,假设太阳辐射在外太空中没有损失);φ为天顶角,表征一天内光照角度的变化:
cosφ=sinLasinτ-cosLacosτcos(πts/12)
(10)
式中:La为计算地点的纬度;τ为太阳赤纬,表达式为
τ=23.45°·sin[2π(nday+284)/365]
(11)
其中:ts为真太阳时间,其表达式为
ts=t±(Lo-Los)/15+es
(12)
其中:t为计算地点的标准时间(单位:h);Lo为计算地点的经度;Los为计算地点所用的标准时间的位置的地理经度,“+”对应东半球,“-”表示西半球;es为真太阳时间和平均太阳时间之间的时差,其近似计算式为
es=0.164 5sin2B-0.125 5cosB-0.025sinB
(13)
式中:B=2π(nday-81)/365
(14)
至此得到了在某坐标、某海拔、某日期的太阳辐照日变化。
2.3 无人机六自由度运动模型
无人机的平移运动决定了其在大气环境中的相对位置,角运动决定了光伏电池受光面与入射光的相对夹角,平移运动与角运动又共同影响了无人机所需推力和速度、即电机功率的大小。太阳能无人机的运动过程采用飞机六自由度运动模型描述,涉及12个状态量,包括空速Vas、迎角α、侧滑角β、滚转角速度p、俯仰角速度q、偏航角速度r、滚转角φ、俯仰角θ、偏航角ψ、向北位移xg、向东位移yg、飞行高度zg。
2.3.1 气动系数
气动系数的求解或者辨识是求取气动力和力矩的前提,目前常用的求解方法是采用计算流体力学有限元软件工具对无人机的几何模型进行风动模拟实验,将获得的气动数据结合气动系数表达式进行插值运算来确定气动系数中的各项参数[16],气动系数表达式如下:
1)滚转力矩系数Cl
(15)

2)俯仰力矩系数Cm
(16)

3)偏航力矩系数Cn

(17)

4)升力系数CL
(18)

5)阻力系数CD
CD=CD0+CDaα
(19)
式中:CD0、CDα分别为零升阻力系数和迎角阻力导数。
6)侧力系数CY
(20)

2.3.2 气动力
假设无人机为刚体,飞行过程中不会产生形变和震动,则无人机所受的气动力为
1)升力L
L=CLqdynSW
(21)
式中:SW为机翼参考面积;qdyn为飞行动压,通过式(22)计算:
(22)
2)阻力D
D=CDqdynSW
(23)
3)侧力Y
Y=CYqdynSW
(24)
2.3.3 气动力矩
(25)
2)俯仰力矩M
M=CmqdynSWCbar
(26)
3)偏航力矩N
N=CnqdynSWbW
(27)
由式(22)可知,无人机的飞行动压会随着大气密度而改变,继而无人机所受的气动力与力矩也会随着海拔高低而不同。例如在低海拔下大气密度大、空气阻力大,无人机需要消耗更多的能量来稳定飞行速度,随着海拔的升高、大气密度降低、空气阻力减少,无人机平飞所需功率降低,但是随着海拔的继续升高,空气变得稀薄、升力将会降低,无人机又需要增加电机功率来保证飞行稳定,因此无人机的运动模型既要向前耦合承受大气环境对气动力和力矩的影响,同时也要向后耦合对能源系统的用电功率产生影响。
2.3.4 重力
飞机受到的力和力矩需要在机体坐标系下进行解算,利用坐标间的转换关系可以得到重力矢量在机体坐标系下的表达形式为[17]:
(28)
式中:m为飞机的质量,下标g表示地面坐标系(原点位于飞机起飞点,Xg轴指向正北方,Yg轴指向正东方,Zg轴指向地心),下标b表示机体坐标系(原点固定在飞机质心处,Xb轴位于无人机对称平面内,并平行于无人机的纵轴且指向机头,Yb轴垂直于无人机对称平面,指向机身右方,Zb轴位于无人机对称平面内,与Xb轴垂直并指向机身下方)。
2.3.5 推力
假设无人机由单螺旋桨提供推力,且螺旋桨的推力平行于Xb轴,所产生的推力为Tf,则机体坐标系下的推力为
(29)
2.3.6 飞机六自由度运动方程
在得到无人机受力与力矩之后,采用非线性微分方程组来描述飞机的六自由度运动,共12个方程,分别描述上述提到的12个状态量。
1)受力方程组
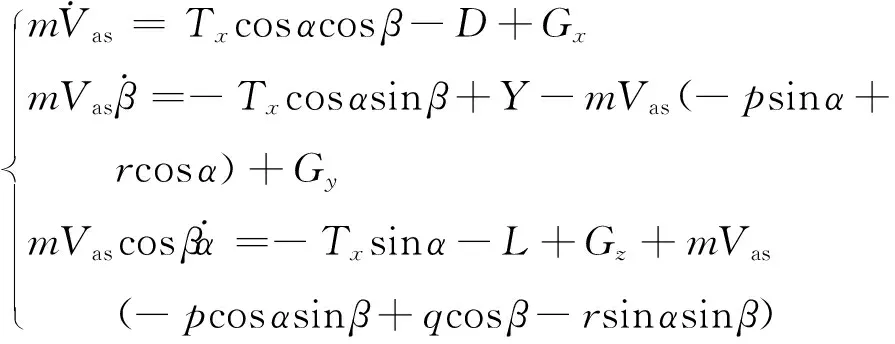
(30)
2)角运动方程组
(31)
3)受力矩方程组
(32)
式中:Ix、Iy、Iz分别为无人机绕Xb轴、Yb轴、Zb轴的转动惯量;Ixy、Ixz、Iyz分别为无人机相对于XbYb平面、XbZb平面、YbZb平面的惯性积。
4)导航方程组
(33)
式中:u、v、w分别为无人机在机体坐标系中沿着Xb、Yb、Zb轴的线速度分量,可通过式(34)求取
(34)
2.3.7 飞行控制器
六自由度运动模型是开环意义下的运动描述,还需要一套飞行控制器来稳定无人机的飞行,并将12个状态量的控制过程转变为无人机的操纵过程。参与无人机操纵的控制量包括:油门δT、升降舵角度δe、副翼角度δa、方向舵角度δr,上述控制量的调整会使无人机的气动力和气动力矩参数发生变化,从而改变无人机运动状态[18]。由于飞机运动方程中的各个状态量之间相互耦合,为了简化飞行控制器的设计难度,通常要对飞机运动方程进行解耦。
当飞机处于水平无侧滑飞行状态时,有β≡0、φ≡0、p≡0、r≡0,基于该条件,可将无人机的飞行解耦为纵向和横向2种运动的叠加,此时纵向运动状态量为(Vas,α,q,θ,zg),横向运动状态量为(β,φ,ψ,p,r)。无人机的运动被分成了纵向和横向2个无耦合的运动形式,因此无人机的飞行控制可分为2个无耦合的纵向飞行控制器和横向飞行控制器来设计。
1)纵向飞行控制器
参与纵向运动的控制变量是油门δT和升降舵角度δe,纵向控制器的控制过程即是对纵向运动的状态量参考值进行跟踪。纵向控制器框图如图4所示,其中GδT为油门的误差放大增益列向量,Gδe为升降舵的误差放大增益列向量。
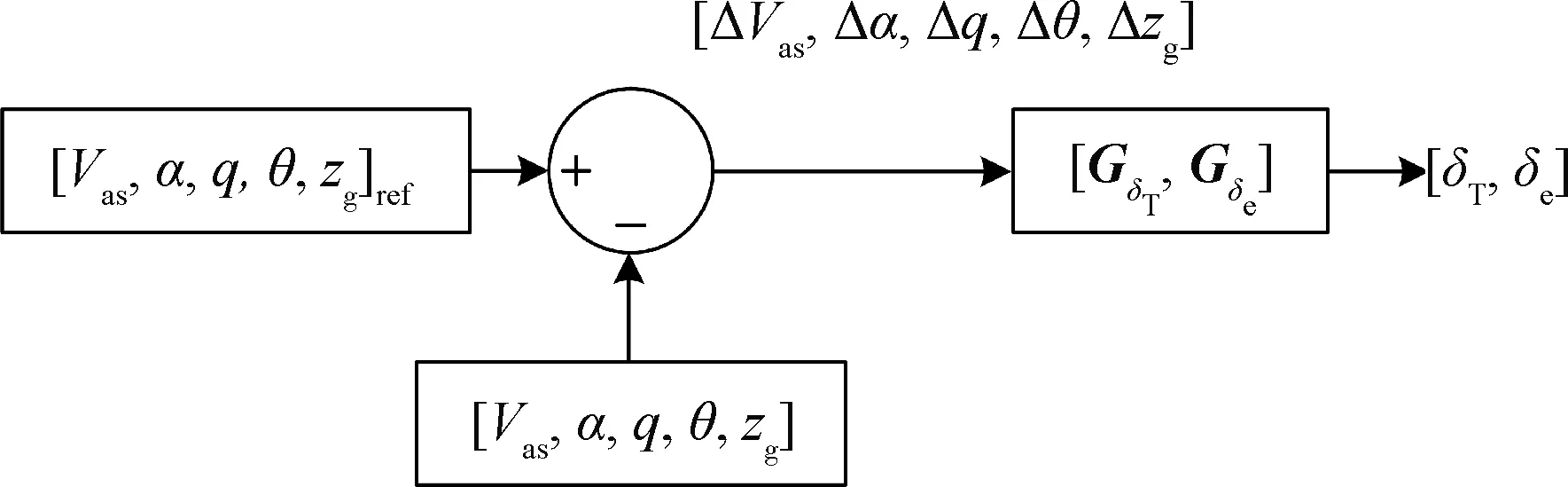
图4 纵向飞行控制器框图
2)横向飞行控制器
参与横向运动的控制变量是副翼角度δa、方向舵角度δr,横向控制器的控制过程即是对横向运动的状态量参考值进行跟踪。横向控制器框图如图5所示,其中Gδa为副翼的误差放大增益列向量,Gδr为方向舵的误差放大增益列向量。

图5 横向飞行控制器框图
2.4 电机模型
太阳能无人机通常采用无刷直流电机作为动力装置,无刷直流电机的数学模型为
(35)
式中:ra为电机内阻;Vmotor为电机两端电压;Imotor为通过电机的电流;Kv为电机KV值;Km为电机转矩常数;nmotor为电机转速;Mem为电机的电磁转矩。
电机的输出转矩为
Mmotor=Mem-MR=Km(Imotor-I0)
(36)
式中:MR为克服空气阻力的空载转矩;I0为对应产生的空载电流。
电机的输入功率为
Pmotor_in=VmotorImotor
(37)
电机的输出功率为
Pmotor_out=2πnmotorMmotor/60
(38)
电机的效率为
ηmotor=2πnmotorMmotor/(60VmotorImotor)
(39)
2.5 减速组模型
太阳能无人机通常为轻型或超轻型飞机,飞行速度较慢,有时会使用减速组来降低螺旋桨的转速,提高螺旋桨效率。假设减速组的减速比为K,机械效率为ηdecelerator,则有
(40)
式中:npropeller为螺旋桨转速;Mpropeller为螺旋桨转矩,式(40)表明减速器将原电机等效为一个KV值为原值的1/K的新电机。
2.6 螺旋桨模型
太阳能无人机的推力由螺旋桨产生,而螺旋桨的推力与大气密度呈正相关关系,这导致能源系统中的动力负荷用电功率与外部大气环境存在耦合。在描述螺旋桨时,首先有如下假设:
1)螺旋桨从电机吸收功率的过程中没有产生损耗。
2)进程比J保持在一个较小的范围内波动,这个范围是最高效率点附近,此处假设J不变,J的典型值为0.65[19],其定义为
J=Vas/(npropellerDp)
(41)
式中:Dp为螺旋桨直径。
螺旋桨推力为
(42)
式中:CT为螺旋桨推力系数。
螺旋桨吸收功率为

(43)
式中:CP为螺旋桨功率系数。
CT和CP是与进程比J相关的数值,通常通过查找与J的关系曲线得到对应值,由于假设J不变,所以认为CT和CP也不变。
螺旋桨的输出功率为
Ppropeller_out=TfVas
(44)
螺旋桨的效率为
(45)
2.7 光伏电池模型
光伏电池模型用来描述太阳能向电能的转换过程,与地面使用的光伏电池不同,太阳能无人机的光伏电池模型不仅需要考虑自身的电压-电流外特性,还要考虑无人机的姿态角度导致电池的受光面与入射光的夹角变化影响。
1)受光量与姿态角关系
式(8)给出的是太阳直射角度下的太阳辐照大小,但还需要考虑太阳入射光与受光平面的角度影响,即无人机的姿态角对光伏电池面板接受太阳辐照大小的定量影响。假设光伏电池平铺在无人机机翼上,在式(8)基础上加入太阳入射光与受光平面的夹角关系:
SPV=Ssinζ
(46)

cosφ=cos(π/2-ο)=sinο
(47)
太阳方位角μ可通过式(48)求取
cosμ=(sinοsinLa-sinτ)/(cosοcosLa)
(48)
图6给出了太阳天顶角、高度角、方位角与太阳能无人机姿态角的示意图。在地面坐标系XgYgZg中,向量s表示为
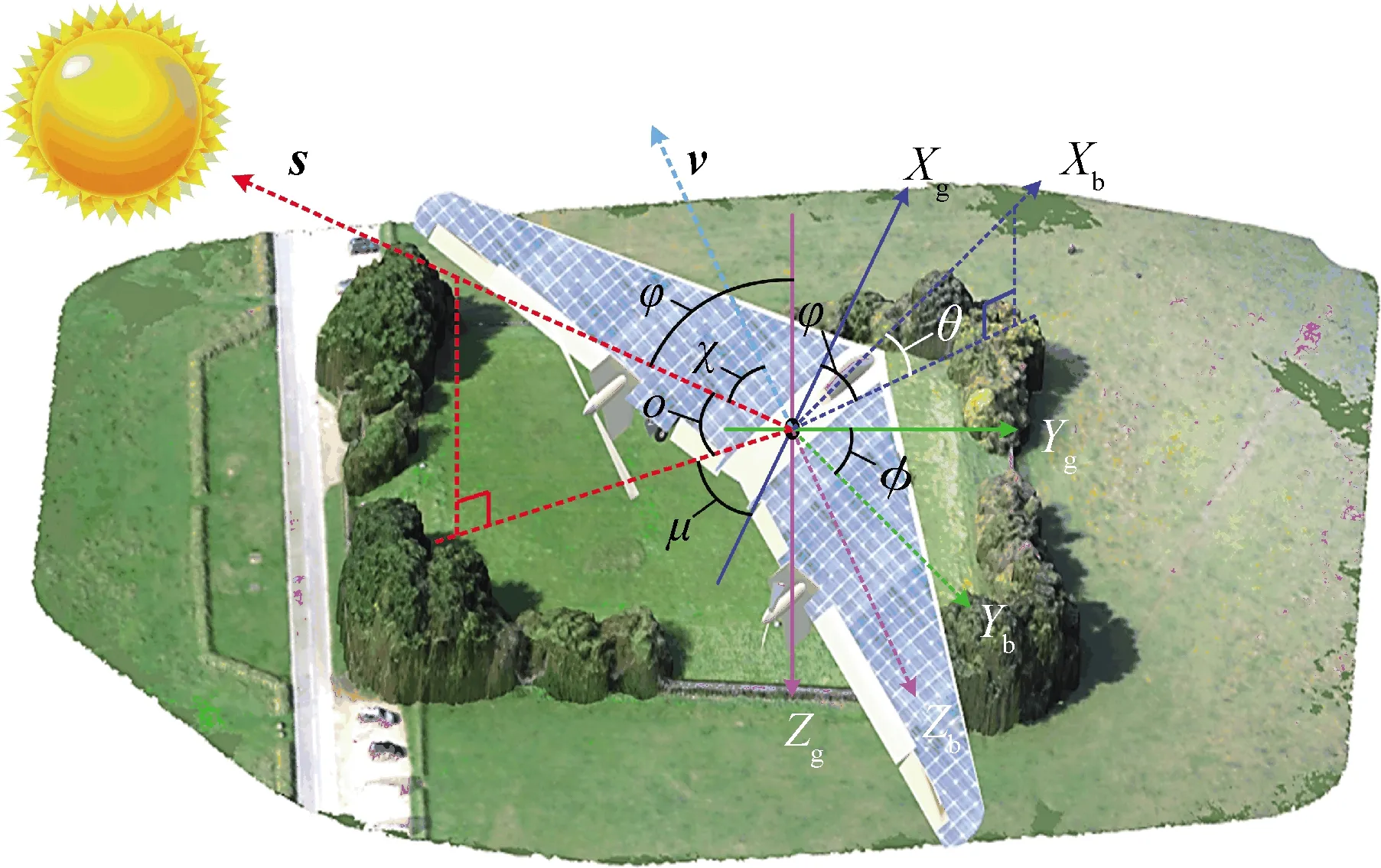
图6 太阳能无人机的角度示意图
s=[i1,i2,i3]=[-cosοcosμ,cosοsinμ,-sinο]
(49)
在机体坐标系XbYbZb中,v=[0, 0,-1],由机体坐标系和地面坐标系的转换关系,可得地面坐标系XgYgZg中的v表示为
(50)
(51)
所以考虑无人机姿态角的太阳辐照公式为


(52)
2)光伏电池外特性模型
太阳辐照和温度对于光伏电池的外特性影响体现在短路参数、开路参数和最大功率点参数上,即短路电流Isc、开路电压Ioc、最大功率点电流Im和最大功率点电压Vm是受光照和温度变化的函数,它们的计算式为
(53)
式中:Sref=1 000 W/m2,为参考太阳辐照值;Tref=25 ℃(298 K)为参考温度;ΔS=SPV-Sref为实际光强与参考光强的差值;ΔT=T-Tref为实际温度与参考温度的差值;补偿系数a=0.002 5/℃、b=0.000 5 W/m2、c=0.002 88/℃。
光伏电池的常用工程模型为
(54)
式中:VPV、IPV分别为光伏组件的端口电压和电流,式(54)结合式(53)中的4个参数可以确定光伏电池的输出外特性。
3)光伏电池不一致性
大翼展太阳能无人机的机翼表面有更多的可铺设面积来布置更多的光伏电池,但光伏电池特性的不一致性影响也会随着电池组合规模的增加变得更加明显,最常见的问题是光伏组件输出功率曲线由单峰特性变为多峰特性,因此对于大翼展太阳能无人机来说,光伏电池模型应进一步细化,通过将输出电流方程(54)分段表示,可建立多峰特性的光伏电池模型[20]。此处假设有3组并联的光伏组件分别为铺设在机翼的左部、中部和右部,每组光伏电池均为特性不一致的单峰特性,组合输出特性为多峰特性,则整个光伏阵列的输出电流IPV_Σ为
(55)
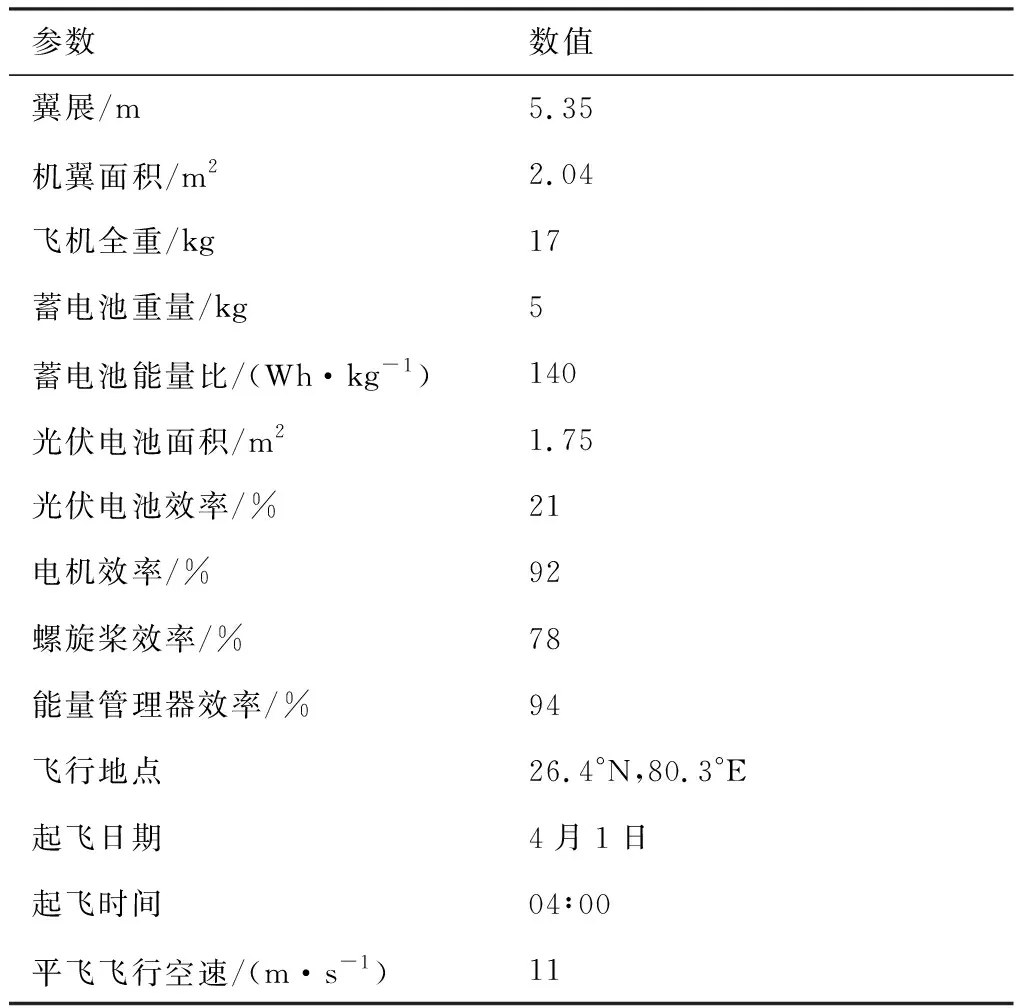
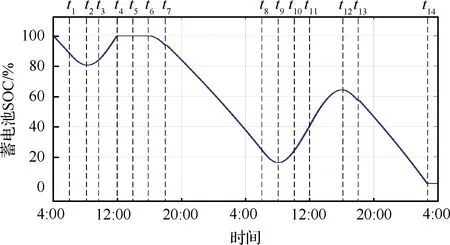
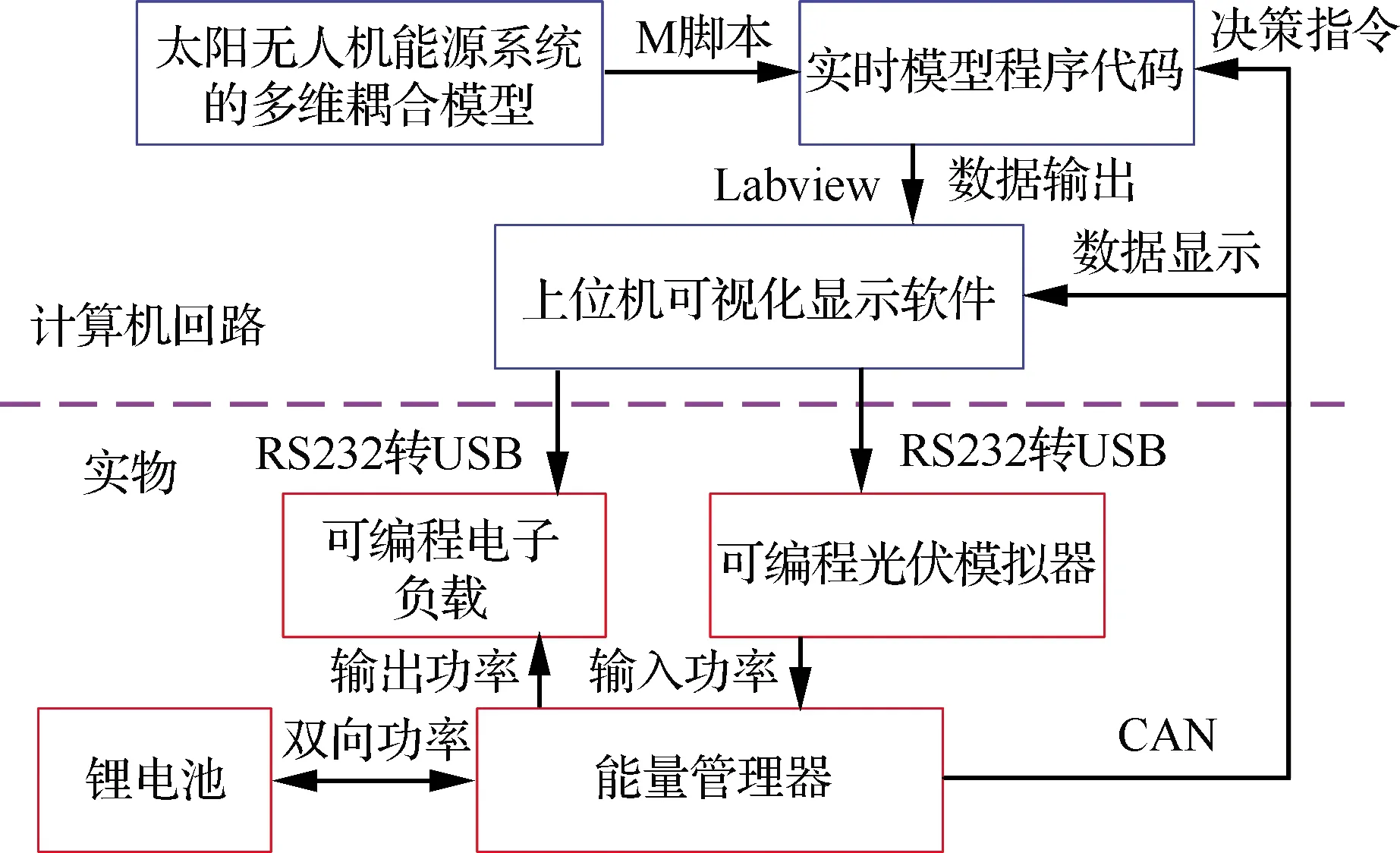
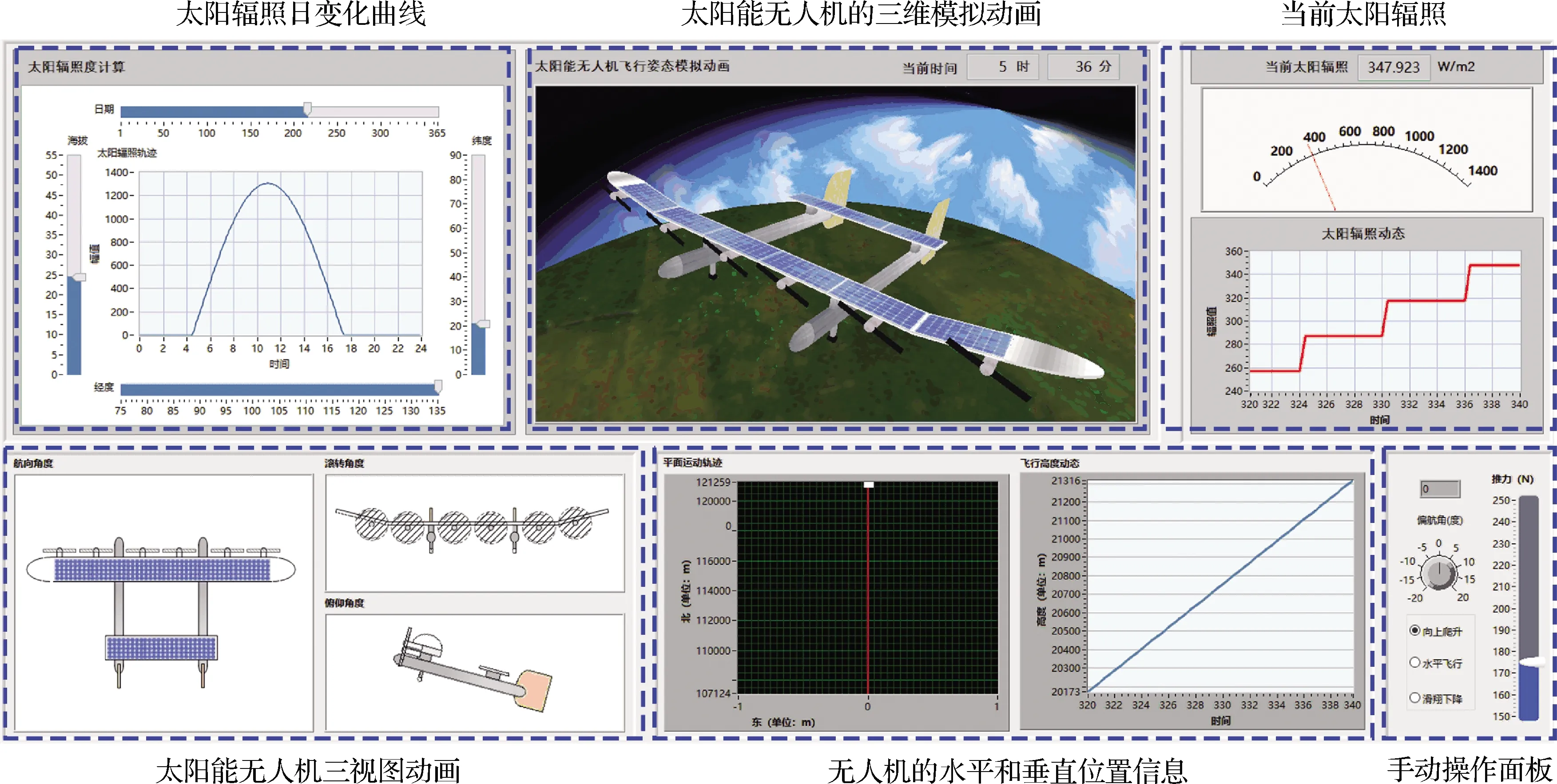
式中:VPV_Σ为光伏阵列的电压;Ileft和Voc_left为机翼左部光伏组件的输出电流和开路电压;Imid和Voc_mid为机翼中部光伏组件的输出电流和开路电压;Iright和Voc_right为机翼右部光伏组件的输出电流和开路电压,且有Voc_left 1)蓄电池外特性模型 蓄电池模型用来描述化学储能和电能间的转换过程,蓄电池模型采用内阻模型表示: (56) 式中:VBAT为蓄电池电压;IBAT为蓄电池电流;SOC为蓄电池的荷电状态;SOC0为初始荷电状态;V0为蓄电池开路电压,根据当前荷电状态SOC采用一维查表得到;r0为蓄电池内阻,根据当前荷电状态SOC和蓄电池电流IBAT采用二维查表得到;CBAT为蓄电池容量。 2)蓄电池不一致性 大翼展太阳能无人机的蓄电池配置容量较大,通常由多个规格相同的独立电池组组合成整个储能系统,此时蓄电池的不一致性表现也会更加明显,其中最直观的表现就是电池串联时组间电压、内阻和容量的不一致,为此可用独立模型建模方法[21],对每个电池组采用式(56)分别进行建模,并考虑不同电池组间的特性参数差异,最后对电池组模型进行整合得到电池系统的特性模型,即对含有k个电池组的电池系统,有 (57) 式中:VBAT_Σ、V0_Σ、r0_Σ、SOCΣ分别为整个储能系统的端口电压、开路电压、内阻和荷电状态;VBAT_i、V0_i、r0_i、SOCi、SOC0_i、CBAT_i分别为第i个电池组的端口电压、开路电压、内阻、荷电状态、初始荷电状态和容量。 综上,上述各个模型均与能源系统中的能量流动存在直接或间接关系,通过在各个模型间建立如图3所示的参数关系,来建立大气环境和飞行行为对能源系统运行的耦合作用,实现对太阳能无人机运动过程中的能量流动的完整计算与描述。对于准确性的追求使得模型的计算量较大,该耦合模型更适合用于仿真试验,或是用作半实物平台的仿真代码模型。 根据上述模型描述,在SIMULINK中搭建太阳能无人机能源系统的仿真模型,无人机的外形尺寸、气动系数、电池容量等参数参照文献[22]设计的太阳能无人机MARAAL,该文同时提供了一组特定日期和地点的实际飞行数据,可作为本文模型仿真结果的有效对比,太阳能无人机的主要仿真参数如表1所示。 图7为本文仿真结果与文献[22]的实际飞行数据对比,可见在相同的飞行轨迹下仿真结果与实际数据基本保持一致,表明本文模型具备了可应用性。图8为48 h内太阳能无人机飞行过程的仿真结果(为保证无人机的能量满足过夜飞行,假设无人机上为高性能光伏电池与蓄电池,调整表1中光伏电池效率为29%,蓄电池能量比为260 W·h/kg),于凌晨4点起飞,至第3天凌晨4点降落,整个过程包含了起飞、爬升、巡航、滑翔、降落等典型飞行状态。 表1 太阳能无人机仿真参数 图7 仿真结果与实际飞行数据对比 图8 太阳能无人机飞行仿真结果 图9为飞行过程中太阳辐照的变化情况,包含太阳辐照直射值(即计算平面与太阳光线垂直时的太阳辐照大小)、地表平面太阳辐照值(即计算平面与地表平行时的太阳辐照大小)、无人机上光伏电池表面的太阳辐照值。可见由于无人机的姿态角度关系,使得布置在机翼上的光伏电池受光程度与地表平面相比出现了差异。例如,在中午12点后的t4~t5时段,此时太阳光线转为从西面射入地表,而由图8(d)可见,该时段中无人机向东北飞行、仰角大于0,所以此时光伏电池表面法线和太阳光线的夹角小于地表平面法线和太阳光线的夹角,使得电池受光量比地表平面要大;而在t5~t6时段,无人机转向西南飞行,此时光伏电池表面法线和太阳光线的夹角大于地表平面法线和太阳光线的夹角,使得电池受光量与地表平面相比要小。以上体现了姿态角度对获取太阳能大小的耦合影响。 图9 48小时内的太阳辐照变化 图10和图11为飞行过程中能源系统的功率流动和蓄电池电量变化情况。在起飞至t1时刻,此时没有光照,只有蓄电池向负载供电;t1时刻后日出,此时光伏电池与蓄电池同时向负载供电;t2时刻,光伏电池发出功率满足负载用电、并向蓄电池充电;至t3时刻完成爬升开始平飞,用电功率下降;t4时刻蓄电池的电量充满,此时无人机再爬升,用电功率增加,将多余的电能转换为重力势能,并且为了稳定能源系统负载母线电压,能量管理器中的光伏电池控制环不再工作在最大功率点跟踪方式,而是工作在负载功率点跟踪方式,降低光伏电池输出功率以保证母线稳定;t5时刻完成爬升并平飞,由于飞行高度升高,大气密度降低、空气阻力减小,所以此时的螺旋桨推力、平飞功率与t3~t4时段相比略有减小;t6时刻光照下降至光伏电池出力不再满足负载所需,蓄电池开始供电;t7时刻,太阳辐照为零,转由蓄电池独立供电,此时优先消耗重力势能,无人机进行滑翔、降低负载功率,达到夜间平飞高度后开始夜间巡航,蓄电池电量被不断消耗;第2天t8时刻后光照上升,光伏电池和蓄电池联合供电,完成了一日的能量闭环飞行;t9时刻,光伏电池向蓄电池充电;t10~t11时刻无人机爬升到日间平飞高度,由于蓄电池电量未满,光伏电池一直工作在最大功率点;直至t12时刻光伏电池输出功率不足,蓄电池开始放电,蓄电池电量不断减少;t13时刻无人机滑翔至夜间飞行高度,消耗重力势能;t14时刻蓄电池电量不足,无人机降落。以上过程体现了无人机能源系统中电能的直接变化以及太阳能、化学储能和重力势能的间接变化过程。 图10 48小时内的能源系统功率流动过程 图11 48小时内的蓄电池电量(SOC)变化 图12给出了基于能源系统多维耦合模型搭建的半实物仿真平台的设计架构,其中大气环境、无人机的运动、光伏电池、动力负荷(螺旋桨、减速器、电机)等相关数据通过计算机实时解算模型得到;蓄电池和能量管理器为真实实物;光伏电池的实物用可编程光伏模拟器代替,模拟器经通信接收计算机仿真得到的光伏电池外特性参数、实时的调节模拟器的光伏曲线,来模拟无人机机翼上光伏电池的输出特性;电机负载的实物通过可编程电子负载代替,与光伏电池类似,电子负载经通信接收计算机仿真得到的负载功率参数、实时的调节电子负载的阻值,来模拟无人机上动力负荷的用电过程。 图12 半实物仿真平台设计架构 图13为实验室内搭建的基于多维耦合模型的半实物仿真平台样机,其中能量管理器的电路拓扑采用三端口直流变换器[23],可通过单级电路同时对光伏电池、蓄电池和负载母线进行功率控制;使用MATLAB脚本编写能源系统模型代码,使用Labview开发可视化界面,将模型脚本嵌入至Labview中实时运行,可视化界面如图14所至Labview中实时运行,可视化界面如图14所示。计算机作为上位实时系统,其后端负责实时计算获取模型数据,并接收能量管理器的决策指令;前端负责显示太阳能无人机的位置、姿态、航迹信息和三维模拟动画,同时接收能量管理器的上传数据,将实际的光伏电池、蓄电池和负载的电压、电流、电量和功率流向显示出来。 图13 半实物仿真平台样机 图14 半实物仿真软件界面 基于耦合模型搭建的半实物仿真平台,为太阳能无人机的能量管理器提供了一个低成本的验证途径,即不必搭建完整的飞机实物、不必进行代价高昂的飞行试验,便可以在地面、实验室内对能量管理器的电路拓扑和能量管理策略进行有效的实机验证。该平台与全计算机仿真相比实验结果更为真实,与真实飞行试验相比更为安全、高效,适合作为过渡平台使用,满足了在太阳能无人机能源系统的理论设计转向工程研发过程中的验证工作需求,尤其是加快太阳能无人机能量管理器的电路设计和能量管理算法的开发效率。关于半实物仿真平台的详细设计将另文阐述,本文不再说明。 1)在建模过程中耦合外部大气环境和无人机飞行姿态对太阳能无人机能源系统运行的影响,解算在任意日期、时间、地点、高度、飞行姿态下的太阳能无人机能源系统发电与用电数据,结果更加准确、模型更加完善,适合用于计算机仿真解算特定参数变化对无人机能源系统运行的影响。 2)仿真结果验证了无人机能源系统产能与耗能过程中外部大气环境和飞行姿态对能量流动产生的影响,尤其是大气环境和飞行姿态对光伏电池功率和动力负荷功率的影响。 3)给出了基于耦合模型的太阳能无人机半实物仿真平台搭建方案,计算机负责实时仿真大气环境和无人机运动过程,经实时通信调节光伏模拟器与电子负载的运行参数,来模拟无人机上光伏电池的发电和动力负荷的用电过程,能量管理器作为被验证的实物参与运行。该平台可作为太阳能无人机的地面实验平台使用,有助于加快无人机能量管理器的开发与验证工作。2.8 蓄电池模型
3 模型仿真结果




4 基于耦合模型的半实物仿真平台

5 结 论
猜你喜欢
汽车实用技术(2022年11期)2022-06-20
走向世界(2022年18期)2022-05-17
农业工程学报(2022年4期)2022-04-24
汽车工程师(2021年12期)2022-01-17
汽车维护与修理(2021年9期)2021-12-01
智能制造(2021年4期)2021-11-04
北京航空航天大学学报(2021年9期)2021-11-02
家庭影院技术(2021年8期)2021-11-02
汽车维护与修理(2021年17期)2021-03-10
百科探秘·航空航天(2020年8期)2020-07-29