基于分层置信规则库的惯导系统性能评估方法
2021-08-03 06:31董昕昊周志杰胡昌华冯志超曹友
航空学报 2021年7期
董昕昊,周志杰,胡昌华,冯志超,曹友
火箭军工程大学 导弹工程学院,西安 710025
随着现代航空航天科学技术的发展,液体运载火箭、无人机等飞行器正在朝着集成化、智能化、高精度的方向演化[1]。惯导系统作为导航制导的核心装置,其精度直接决定运载火箭等飞行器的飞行精度和可靠性[2]。惯导系统作为一种高精度的传感器,其内部设计精密,轻微故障或者部分元器件退化都会导致其敏感精度降低、误差增大,致使导航系统的安全性下降,甚至有可能造成灾难性后果,鉴于此,需对惯导系统进行准确的性能评估,为以后误差修正补偿提供依据[3]。目前,国内外学者针对惯导系统性能评估开展了大量研究,现有的性能评估方法根据所建模型的不同主要分为3种:基于定量信息的性能评估方法、基于定性知识的性能评估方法和基于半定量信息的性能评估方法[4]。例如,文献[5]根据惯导的层次结构,采用一种基于证据推理的多指标的性能评估方法,计算装备指标信息的可靠度,构建了多层评估指标体系对惯导系统性能进行评估。文献[6]以惯导中光纤陀螺为研究对象,对性能特征参数的退化数据进行建模,并提出一种基于性能退化与D-S证据理论的性能评估方法。文献[7]在提出了一种基于小波阈值降噪与BP神经网络的陀螺仪漂移误差补偿方法,利用小波分析剔除噪声,再利用BP神经网络建立陀螺仪漂移误差预测模型,降低了陀螺仪的输出误差,对提高惯性系统的导航精度。
综合惯导系统工作机理和已有研究,分析可得惯导系统性能评估主要受以下3个因素影响:一是受设计寿命限制,惯导系统的测试次数有限,惯导系统在进入实际的工作环境前需要进行标定测试,记录和监测惯导系统的重要信息从而判断其性能状态,而然标定测试的次数较为有限,测试次数过多会影响惯导系统使用寿命同时导致维护成本过高,这导致其性能评估的数据缺乏[8];二是惯导系统由多个部件构成,评估指标多内部机理复杂难以建立精确的解析模型,惯导系统在组成结构上可以划分仪表、信号处理电路,软件等,其中仪表是最重要的组成部分,仪表又可以分为加速度计和陀螺仪等,而加速度计和陀螺仪内部又有复杂的机理结构,难以建立其准确的数学模型;三是惯导系统部件组合安装过程由机械加工、装配存在误差,导致轴向间加速度计、陀螺仪不正交,其所存在的安装误差会降低惯导的输出精度[9]。综上对惯导系统性能评估中要充分考虑以上3点因素。
置信规则库(Belief Rule Base, BRB)作为半定量信息评估方法的一种,是英国曼彻斯特大学Yang等所提出,是由If-Then规则、传统D-S理论上扩充发展而来[10-11]。BRB的本质是一种专家系统,可以建立输入与输出复杂的非线性关系,由于在表达与推理的过程中有效融合了专家知识和定量数据,增加了模型的输入信息量,克服了建模过程中数据不足时模型精度较差的问题,在小样本建模上有良好表现[12]。目前已经广泛地应用在、医疗决策、大型工业系统安全性评估、复杂系统故障预测等领域[13-14]。
因此,运用BRB模型对惯导系统性能评估是一种有效途径,然而惯导系统组成结构复杂,评估指标多,对于多指标复杂系统的决策问题运用BRB模型评估时容易产生组合爆炸问题,影响性能评估的结果[15]。为解决这一问题常采用分层BRB模型,分层BRB的主要思想是采用自下而上模式,首先对底层的指标进行组合,然后把组合结果作为下一层的输入,直至达到目标状态[16]。分层BRB优势在于根据系统结构建立评估体系,相比于单层BRB,分层BRB的层次结构有效减少了规则的数量,有效避免了BRB模型产生的组合爆炸[17]。
为有效解决惯导系统性能评估所存在的问题,本文提出了一种基于分层BRB的惯导系统性能评估方法,从影响导航精度的误差源角度,首先评估惯导系统的单个器件性能状态,在模型中考虑了器件组合过程产生的安装误差对性能状态的影响;其次为降低专家知识的局限性,通过优化算法对模型参数进行局部调整;最后通过实验验证了方法的有效性。
1 问题描述
针对惯导系统性能评估中存在的问题,本文建立了基于分层BRB的评估模型。综合考虑惯导系统性能评估时惯导系统的层次结构与惯导器件组合产生的安装误差对性能的影响,本文主要解决以下3个问题。
问题1如何根据系统结构与影响性能的误差源建立惯导系统的分层模型,是第一个需要解决的问题。在本文中惯导系统的分层模型表示为
W(*)=W{…{B1[A1(x1…xi),…,AN(xj…xm)]
…BN[…]}}x1…xi,xj…xm∈X
(1)
式中:A代表底层的性能状态;B表示中间层性能状态;W表示顶层性能状态,即惯导系统最终的性能状态,x1,x2…xi,xj…xm∈X表示所有底层输入指标。
问题2惯仪表器件组合存在安装误差影响系统性能评估的准确性,如何模型中降低安装误差对惯导性能的影响是第2个需要考虑的问题。
问题3如何对模型进行推导,并降低初始分层模型中专家知识的局限性,对所建分层模型进行优化提高精度是需要考虑的第3个问题。优化模型表示为
(2)
式中:f(V)为目标函数;V为由BRB参数所构成的向量;A(V)为等式约束;B(V)为不等式约束。
2 基于分层BRB的惯导系统性能评估方法
2.1 分层BRB模型基本知识
BRB的规则通常由领域专家基于经验知识与系统模型的历史数据确定,专家通过确定带有置信分布若干条规则重要参数的初始值,将专家知识镶嵌到规则中组成置信规则库。分层BRB系统是由若干个子规则库组成,每个子规则库由一定数量的规则组成,其中规则基本结构如下[18]:

With ruleθk, attributeweightδ1,δ2,…,δM


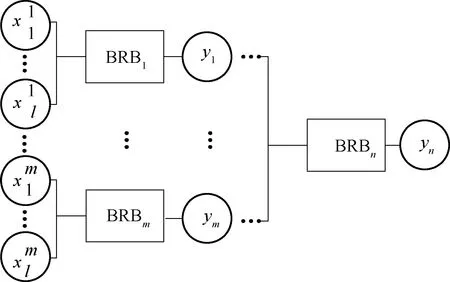
图1 分层BRB模型的基本结构
2.2 惯导系统分层性能评估模型建立
惯导系统作为一种能自主导航系统,内部结构主要是空间上3个正交安装的陀螺仪和加速度计组成,通过加速度计与陀螺仪的输出值计算位置信息。惯性器件在长期工作过程中性能状态下降,产生误差,惯性器件的误差会使输出的信息不准确,降低惯导系统性能状态,影响导航系统的精度。误差主要来源一是惯性器件本身产生的误差,如零位偏差,另一种是器件组合的安装误差,理想情况下惯导系统内部同轴的陀螺仪与加速度的敏感轴相互平行,各轴向间的敏感轴的延长线交于一点,实际中由于装配等因素影响,轴向间延长线不正交,产生安装误差,影响系统输出。因此综合考虑惯导系统的结构和误差来源构建的分层结构如图2所示。
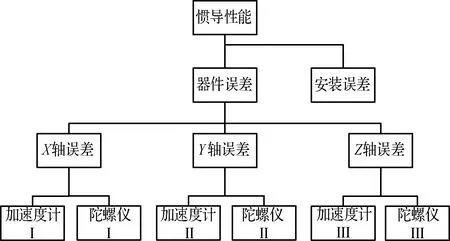
图2 惯导系统性能评估层次模型
安装误差使得通过仪表误差评估惯导性能时出现偏差,在建立分层模型时综合仪表误差与安装误差对系统性能的影响。结合图1、图2构建基于分层BRB的惯导性能评估结构图如图3所示。分层模型以3个轴向的加速度计和陀螺仪的状态作为底层指标,单轴向的器件作为一个子规则库,单轴向输出的性能状态作为惯性器件性能状态的输入属性,而惯导轴向部件组合产生的安装误差与惯性器件误差作为顶层指标判断惯导系统性能状态。

图3 惯导系统性能评估的分层BRB模型
分层模型共分为3层5个子规则库系统,前3个子规则库的输入为对应的加速度计和陀螺仪的性能状态,前3个子规则库的输出为第4个子规则库的输入,第5个子规则库的输入为子规则库4输出与惯导系统的安装误差。惯导系统评估模型的第1层是对惯导系统3个轴向加速度和陀螺仪的评估,分成3个子规则库,第2层是对整体的惯性器件进行评估为子规则库4,第3层是在考虑安装误差的基础上对惯导系统进行评估,为第5个子规则库。
利用专家的经验知识与输入监测量建基于分层BRB的惯导系统性能评估模型,模型可通过输入监测量判断惯导系统的性能状态,为下一步对惯导系统的维护做辅助决策。
2.3 分层BRB惯导系统性能评估模型推导过程
分层BRB模型的输出需要输入信息转换,首先将信息通过如下公式转化在统一的度量框架下,即转化为属性xi,i=1,2,…,M相对于参考值的匹配度,计算方法为
(3)

在求得匹配度后,计算激活权重即输入信息对规则的激活程度,激活权重的计算方法为
(4)


(5)

(6)
式中:βi为输出的第N个参考值的置信度。
模型的输出结果可以表示为
S(xi)={(Dj,βj)},j=1,2,…,N
(7)
式中:S(xi)为输出函数,惯导系统性能状态的分布式输出。输出结果效用μ(S(xi))表示为
(8)

2.4 分层BRB惯导系统性能评估模型优化过程
初始模型的参数是由领域专家结合经验给定,由于惯导系统的机理复杂,专家知识存在一定的局限性,难以确定参数的精确值,需要通过优化算法对参数进行微小调整,优化输出结果。优化的基本思想就是使规则库的输出与实际系统的输出的差值最小,如图4所示。

图4 BRB系统参数优化结构
模型精度即优化的目标函数用实际系统的性能状态与模型的输出的均方差(Mean Square Error, MSE)表示,惯导的实际性能状态由多个领域专家经验知识给出。
(9)

优化目标与约束条件可以表示为
min MSE(θk,βn,k,δi)
s.t.:
(10)
以MSE最小为优化目标,以式(10)为约束条件进行优化,本文中的优化算法为基于投影算子的协方差矩阵自适应优策略,P-CMA-ES在原始CMA-ES智能的优化算法的一种改进算法,通过生成初始种群,在约束条件下选择,生成子种群不断迭代寻找最优解,它在高维非线性优化的方面表现良好,能够利用较少的样本快速收敛到全局最优点[20]。其优化过程如图5所示。

图5 P-CMA-ES优化过程
2.5 分层BRB惯导系统性能评估模型方法步骤
本节对基于分层BRB惯导性能评估方法模型的推导过程和步骤进行总结,建模过程主要分为以下4个步骤,建模过程如图6所示。

图6 分层BRB性能评估模型建模流程
步骤1根据惯导系统结构和影响性能的误差源,构建基于分层BRB的性能评估模型。
步骤2专家结合惯导系统内部工作机理,给定指标的参考等级与参考值,将输入信息转化根据式(3)计算匹配度,根据式(4)计算激活权重。
步骤3对激活规则的输出根据式(5)~式(6)进行通过ER算法融合,计算惯导的性能评估结果。
步骤4以式(9)为目标函数,通过P-CMA-ES优化算法对参数优化,计算最终结果。
3 实验验证
本文以某型惯导系统的实测数据进行实验验证。惯性器件的零位偏差是惯性器件中的重要误差参数之一,是衡量加速度计和陀螺仪精度的重要指标,本文中加速度计和陀螺仪的性能评估指标采用零位偏差系数,惯导系统的安装误差指标采用标定的安装误差系数[21]。本文以某型捷联惯导2016年9月至2019年6月的标定数据为例,监测的标定数据的时间间隔为2个月,分别记录惯导加速度计和陀螺仪的零位偏差,安装误差系数共得到16组数据,如图7所示。
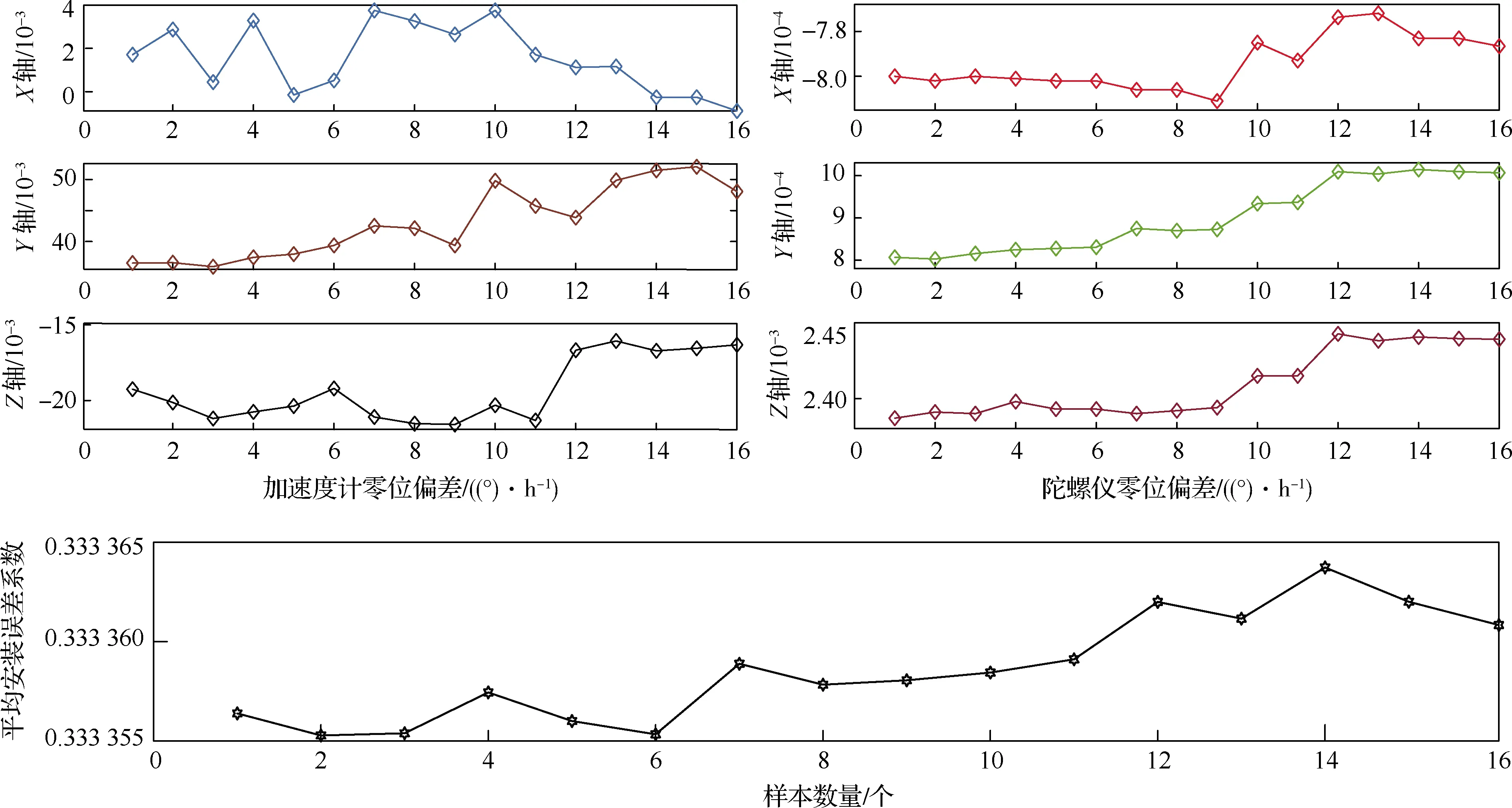
图7 误差系数监测数据
分层模型共有3层5个子规则库,7个输入指标分别是加速度计X、Y、Z轴的零位偏差Dax、Day、Daz,陀螺仪X、Y、Z轴的零位偏差Dgx、Dgy、Dgz,安装误差系数Ea,一般的安装误差可用6个参数描述,本文中为了便于性能评估,安装误差系数Ea采用参数平均值。规则库共24条规则,包括子规则库1、2、3各4条规则,子规则库4共8条规则,子规则库5共4条规则,模型的初始参数由专家给出,对输入指标设置2个参考等级,小(Small,S)和大(Large,L),惯导系统性能状态设置3个参考等级,零(Zero,Z)、中(Medium,M)和高(High,H)。如表1~表4所示:

表1 仪表零位偏差的参考等级和参考

表2 安装误差系数的参考等级和参考值

表3 惯导系统性能状态参考等级和参考值

表4 惯导系统性能评估初始规则库模型
评估模型构建其初始参数由专家先验知识给定, 受专家知识的不确定性和无知性的影响,在使用初始置信规则库模型对惯导系统进行性能评估时,会受到惯导系统工作环境、实际工作状态等因素的影响,降低模型的评估精度。因此,在使用模型对惯导系统进行性能评估时需要对模型参数进行调整修正, 提高对惯导系性能评估模型的评估精度。
在优化模型中,共收集得到16组数据,从中随机抽取8组作为训练数据,对模型的初始参数进行调整。在实验过程中,惯导系统真实性能状态由两位领域专家结合各个监测指标和经验知识给定。
从图8中可以看出,在惯导系统性状态降低时,本文中所构建的初始模型可以对其进行大致的评估,惯导系统性状态较高时原始模型存在一定的误判情况,而优化后的模型能够更加准确地评估惯导系统性状态,初始模型MSE为0.029 6,经过训练后模型MSE为0.002 1,相比于初始模型精度提升92.9%。优化后的模型参数如表5所示。
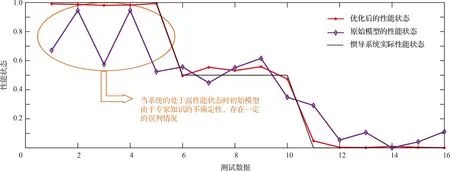
图8 惯导系统性能评估模型训练与测试
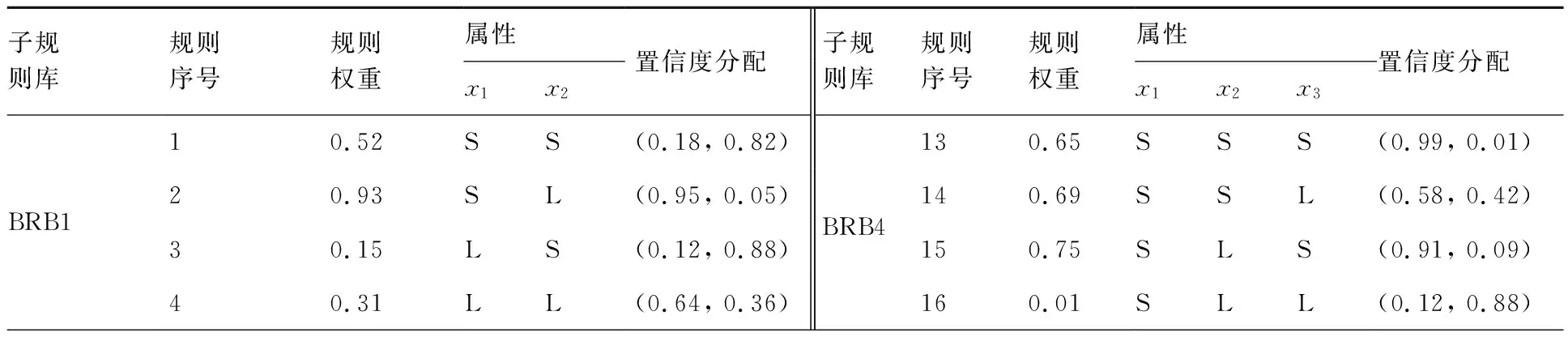
表5 惯导系统性能评估优化后规则库模型
为证明本文优化模型具由良好的鲁棒性,又进一步设计了在训练数据增加情况下的模型精度与在随机取样50%训练数据的情况下模型精度比对实验,模型精度采用MSE表示,如图9和图10 所示。
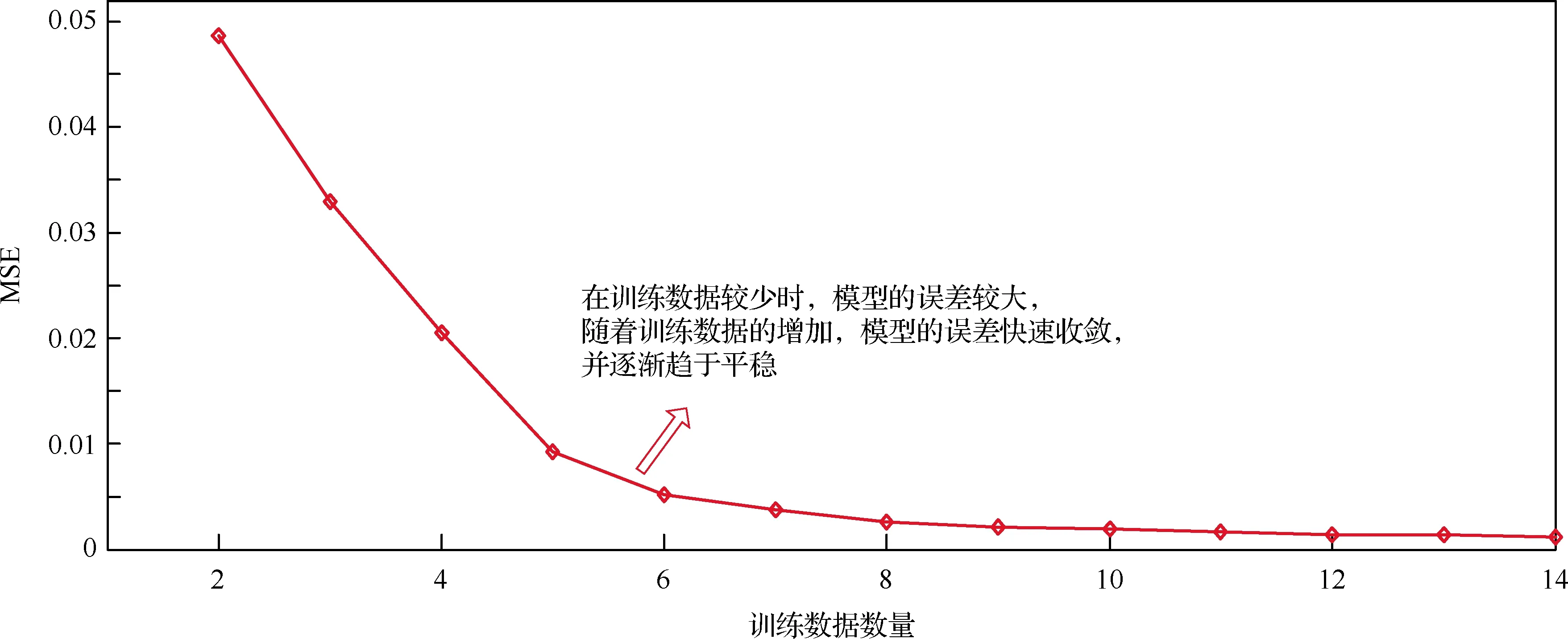
图9 训练数据增加下优化模型均方差变化

图10 随机取样下优化模型的均方差
从图9中可以看出,训练数据从2组到14组的MSE不断降低,这表明随着训练数据组数的增加,优化模型的精度不断提升,当训练数据为2组时模型的MSE为0.048 61,当训练数据为6组时模型的MSE为0.005 145,模型精度提升了89.42%,表明分层BRB模型在具有一定量训练数据的情况下,具有良好的建模能力。图10 为数据取50%训练数据的情况下,进行50次测试优化模型MSE变化情况,50次测试中模型MSE均值为0.002 37,方差为1.815 2×10-6,表明了优化模型具有较好的鲁棒性、稳健型。
进一步量化对比本文方法的有效性,本文设计了对比实验,如表6所示。可以看出不同的评估方法对于惯导系统性能评估的精度存在差异,在对惯导系统性能评估时,原始BRB模型由专家构建,由于信息的模糊不确定性与专家知识局部无知性的影响评估的精度较差;未分层BRB模型由于没有利用惯导系统的层次结构,产生“组合爆炸”,参数难以优化,导致评估误差较大,而本文方法在传统分层BRB的优化基础上引入安装误差对性能状态的影响,提升了模型的输入信息量,提升了模型精度,故本文方法有效提高了小样本情况下惯导系统性能评估的精度。

表6 均方差对比
4 结 论
惯导系统作为飞行器导航系统的核心部件,保证其工作期间的性能状态是确保飞行器安全稳定工作的关键。本文针对惯导系统性能评估中所面临的可用监测数据缺乏、系统复杂度高、误差来源多样等问题,基于分层置信规则库建立了惯导系统性能评估模型,并考虑了加速度计与陀螺仪在组合过程中产生的安装误差,通过实验验证了所提方法的有效性。
本文提出的基于分层置信规则库模型为惯系统性能评估提供了有效途径,具有潜在的工程应用价值。但目前本文中所提出的性能评估模型是在假设惯导系统在恒温恒湿无干扰的环境下,而在惯导系统在实际的工作或贮存过程中常受到环境干扰,如在高寒或高湿的环境下会使惯导系统的性能状态会发生变化,因此在未来的惯导系统评估研究过程中需要考虑环境干扰对惯导影响,且本文中模型本质上是一种离线的模型,无法实现惯导系统性能的实时评估,关于建立实时性能评估模型,如何利用所监测最新的输入信息,对系统模型的动态更新,实现惯导系统性能的动态评估需要进一步研究。
注:性能评估模型评估周期所需时间取决于监测数据的测试周期。由于标定测试的成本与影响系统使用寿命的原因,无法频繁进行测试,目前国内惯组系统的测试周期为一般定周期测试,故本文中的评估模型为离线的定周期模型。
猜你喜欢
科技创新与品牌(2022年7期)2022-11-15
导航定位学报(2022年4期)2022-08-15
学习与科普(2022年15期)2022-04-22
北京航空航天大学学报(2021年9期)2021-11-02
甘肃教育(2021年12期)2021-11-02
甘肃教育(2021年12期)2021-11-02
现代仪器与医疗(2021年1期)2021-06-09
智富时代(2018年5期)2018-07-18
智富时代(2018年5期)2018-07-18
中学生数理化·七年级数学人教版(2016年6期)2016-05-14