水面舰艇编队最佳队形确立与防空能力预测
2021-08-05 06:07王丽婷李爱玲谷翠梅闫艺芳
河北北方学院学报(自然科学版) 2021年7期
王丽婷,李爱玲,谷翠梅,闫艺芳
(河北北方学院 理学院,河北 张家口 075000)
0 引 言
在信息化战争的大背景下,舰艇在完成自身任务时为了达到一定的效果往往编成编队以集中兵力,但不是船只越多效果越好,必须依据实际情况采用合理的队形、灵活的指挥才能更好地集中兵力。舰艇编队是集中兵力的具体体现[1],队形则是发挥兵力的必要手段和形式,在水面舰艇编队防空袭时,一旦一方在队形上暴露了问题,很容易招致灭顶之灾。所以关于水面舰艇编队最佳队形建立的研究对于提高水面舰艇编队的防御能力具有重要意义[2-5]。在编队最佳队形确立后,为了进一步衡量防空系统性能,从而能够为有效应对敌方攻击做出准备,需提前对编队抗饱和攻击能力进行预测。所谓编队抗饱和攻击能力则是指应对敌方饱和攻击时的抗打击能力,确切地说是当指挥舰遭遇多批次导弹几乎同时攻击时,在最危险的方向上,编队能够拦截来袭导弹的最大批数,若能准确地对编队抗饱和攻击能力进行预测,则可以对该型舰作战能力研究提供参考。另一方面,我们同时需要就提供的战场空中目标信息来判断目标可能的意图,为威胁判断、火力分配和抗击来袭目标奠定基础。基于以上因素,本文以4艘驱护舰艇所组成的小型舰艇编队为主要研究对象,在合理假设的基础上,结合计算数学、物理模型以及CAD的应用来预测水面舰艇编队防空最佳队形、抗饱和攻击能力以及对空中目标意图进行识别,以期在信息化战争背景下对水面舰艇编队防空作战技能和效率提供一点助力。
1 编队最佳队形模型建立
1.1 最佳探测距离的确定
编队仅依靠自身雷达对空中目标进行探测,但因为有数据链,所以编队中任意一艘舰发现目标,其余舰都可以共享信息,并由指挥舰统一指挥各舰进行防御。已知以指挥舰为原点的20°至220°扇面内均可能有导弹来袭,要求指挥舰安全,且敌军导弹进入各舰10 km以内不得使用防空导弹拦截,则4艘护卫舰必须尽可能“早发现,早预警,早拦截”。
已知各舰发现来袭导弹的随机变量都服从均匀分布,并且导弹与该舰之间距离在20~30 km,同时发现目标不考虑“丢失”。对于各舰发现来袭导弹的随机变量都服从均匀分布U(20,30)而言,其概率密度函数为
(1)
数学期望为

(2)
因此,各舰发现来袭导弹的范围应取25 km,这时可以最大可能地发现来袭导弹。
1.2 最佳队形的确立
为了及时有效地拦截来袭导弹,在最佳探测距离确定后,仍然需要各舰艇组成最佳防御队形。已知各舰上的防空导弹型号相同,水平最小射程为10 km,最大射程为80 km,且敌军导弹进入各舰10 km以内不得使用防空导弹拦截,此时,不考虑使用电子干扰和近程火炮(包括密集阵火炮)等拦截手段,则该舰艇等同遇袭。
综上,以指挥舰为原点,20°至220°的范围内,各护卫舰应尽早发现并可以拦截来袭导弹,各舰发现来袭导弹的范围选取最佳探测距离25 km,由此关系,可拟合出图1。

图1 舰艇防御范围
图1中原点表示指挥舰,A、B、C、D分别为4艘护卫舰,其中以25 km为半径得到的圆分别为指挥舰和A、B、C、D4艘护卫舰的监察范围。以10 km为半径得到的虚线圆为对应舰艇的水平最小射程,在不考虑使用电子干扰和近程火炮等拦截手段,导弹来袭进入该区域则该舰艇等同遇袭。以80 km为半径得到的虚线圆为对应舰艇的水平最大射程,即该舰艇的防御范围。由三角形关系可知A、B、C、D4艘护卫舰距离中心指挥舰的距离约为59.2 km,用极坐标表示为A(59.2,45)、B(59.2,95)、C(59.2,145)、D(59.2,195),AB之间、BC之间、CD之间的距离均为50 km。图中位置距离关系表明该队形中,A、B、C、D4艘护卫舰形成的监察范围,较之单一舰艇半径由25 km扩大到了59.2 km,每一艘护卫舰均可拦截任意方向来袭指挥舰的导弹,并且可护卫相邻护卫舰。
2 编队抗饱和攻击能力预测
舰艇的抗饱和攻击能力是与一定条件相关的,如来袭导弹的类型、数量、速度等[6-10]。由最佳队形的确立可知,指挥舰的20° 与220° 方向有来袭导弹时,发现时间最晚,并且各舰艇距此处位置较远,完成拦截任务的时间较长。舰艇编队正在向200° 方向航行,航速每小时16海里(即8.32 m·s-1),航行方向恰与20° 相反,则220° 方向最为危险。
假设多批次导弹几乎同时攻击指挥舰时,在最危险的方向,即220°方向,计算可拦截导弹的最大批数。
由图1中三角形关系可知,该方向上来袭导弹被发现的位置极坐标表示应为J(53.6,220)。
为方便计算距离,将极坐标转换为直角坐标,根据坐标转换公式
(3)
则O、A、B、C、D、J坐标分别为(0,0)、(41.8,41.8)、(58.9,-5.1)、(33.9,-48.5)、(-57.2,-15.3)、(-45.34,-38.0)。
将计算单位进行统一,航速、防空导弹速度和来袭导弹的飞行速度均转化为以km·s-1为单位,即为航速0.00832 km·s-1、防空导弹速度0.816 km·s-1、来袭导弹速度为0.306 km·s-1。
由物理中的追击与相遇问题、结合图1位置关系分别计算由O、A、B、C、D5艘舰艇发射的防空导弹击中来袭导弹的时间、位置。设发现来袭导弹的时刻为t=0,因为舰艇航速远远小于导弹速度,所以舰队航行的速度可以忽略不计。导弹袭击到指挥舰的时间为T=142.5 s(敌军导弹进入各舰10 km以内不得使用防空导弹拦截,发现到无法拦截导弹运行距离仅为43.6 km),防空导弹拦截距离最大为80 km,每次发射后拦截时间最大为98.04 s。
各舰艇欲拦截220°方向来袭导弹,可首先抽象求各舰艇到导弹轨迹的距离,即O、A、B、C、D5点距直线OJ的距离,分别为0、5.1、41.9、57.2、25 km。根据公式(4)
(4)
则计算可得对应点的坐标,分别为
O′(0,0)、A′(-59.0,220),B′(-41.9,220),C′(15.3,220),D′(53.6,220),J(53.6,220)。
O点舰艇发射的防空导弹计算结果:第一次拦截时间为t1=(45.9+7)s, 来袭导弹位置为(-28.7,-24.0),原点矩为37.4 km,拦截成功。尝试再次拦截,第二次拦截时间t2=(31.4+59.9)s,来袭导弹位置坐标为(-19.6,-16.5),原点矩为25.7 km,拦截成功。尝试第三次拦截,第三次拦截时间t3=(21.0+98.3)s, 来袭导弹位置为(-13.1,-10.1),原点矩为17.1 km,拦截成功。尝试第四次拦截,第四次拦截时间t4=(13.3+126.3)s, 来袭导弹位置为(-8.3,-7.0),原点矩为10.9 km,拦截成功。此时t4=139.6s,O已无法进行第五次拦截。
D点舰艇发射的防空导弹计算结果:第一次拦截时间为t1=(34.3+7)s,来袭导弹位置为(-33.1,-27.7),原点矩为43.2 km,拦截成功。尝试再次拦截,第二次拦截时间t2=(47.1+48.3)s, 来袭导弹位置为(-18.7,-15.7),原点矩为24.4 km,拦截成功。此时t2=95.4s,D已无法进行第三次拦截。
C点舰艇发射的防空导弹计算结果:第一次拦截时间为t1=(72.2+7)s,来袭导弹位置为(-22.5,-18.9),原点矩为29.4 km,拦截成功。此时t1=79.2s,C已无法进行第二次拦截。
B点舰艇发射的防空导弹计算结果(必须考虑舰艇拦截半径最大为80 km,每次发射后拦截时间最大为98.04 s):第一次拦截时间为t1=(92.8+7)s(92.8<98.04, 因此发现时B舰艇也作出拦截准备,恰能在攻击范围内作出拦截),来袭导弹位置为(-17.3,-14.8),原点矩为22.6 km,拦截成功。此时t1=101.3 s,B已无法进行第二次拦截。
A点舰艇发射的防空导弹计算结果:必须考虑舰艇拦截半径最大为80 km,每次发射后拦截时间最大为98.04 s。第一次拦截时间为t1=(92.8+7)s(92.8<98.04), 因此发现时B舰艇也作出拦截准备,恰能在攻击范围内作出拦截),此时来袭导弹位置为(-17.7,-14.8),原点矩为23.1 km,拦截成功。此时t1=99.8 s,A已无法进行第二次拦截。
综上所述,对于当不考虑使用电子干扰和近程火炮等拦截手段,仅使用防空导弹拦截来袭导弹,编队防御敌来袭导弹对我指挥舰攻击时的抗饱和攻击能力(即当指挥舰遭遇多批次导弹几乎同时攻击时),在最危险的方向上,能够拦截来袭导弹的最大批数为9次。
3 空中目标的意图识别
防空反导是水面舰艇编队最重要的任务之一,水面舰艇若要很好地完成防空反导任务,先决条件之一是对战场态势有全面和准确的把握,而空中目标意图识别是战场态势分析的一个重要部分,其中目标意图(即目标试图完成的任务或目标为达到某种作战目的而采取的一系列作战行动和计划[2]),可以分为:侦察、监视、攻击、掩护和其它5类。我们可以就提供的战场空中目标信息来判断目标可能的意图,为威胁判断、火力分配和抗击来袭目标奠定基础。
3.1 坐标系的建立和转换
对空中目标的发现主要依靠水面舰艇上安装的雷达和侦查预警机上安装的雷达,雷达的原理是通过定向发射雷达波,然后接收经过空中目标发射回来的反射波,计算得出目标的方位、距离、高度和目标的雷达反射面积,通过不同时间点的数据,还可以算出目标的速度和航向角等。水面舰艇编队扫描系统最基本特征是坐标系和该坐标系的原点,坐标系和原点的选择主要依赖于指挥舰和空中的可疑目标。
3.1.1 地球坐标系(OXgYgZg)
地球坐标系是一种惯性坐标系,坐标系的原点选在地球球心。Zg轴为地球的自旋轴,从地球球心指向北极;Xg轴被定义为赤道平面上,从地球球心指向子午线的轴线;Yg轴是Xg轴和Zg轴的正交结果(图2)。有一点需要说明的是,在不同的实际应用中,地球坐标系各坐标轴的定义会出现不一致的情况。
图2 地球坐标系
通常,该坐标系中的目标坐标用经度、纬度和高度表示,因而这种坐标系也常称为地理坐标。当雷达将探测的目标信息上报时,目标的位置信息经常用地理坐标表示。
3.1.2 直角坐标系与极坐标系的转化
空间点P在两坐标系中存在的几何关系如图3所示。
图3 直角坐标系与极坐标系的相互转换
为了便于计算需将极坐标转换为直角坐标,把点P在空间极坐标系中的目标位置记为(H,α,γ),在直角坐标系中的坐标位置记为(X,Y,Z),则极坐标系与直角坐标系之间的变换关系[11]为

(5)
3.2 基于聚类分析的空中目标识别
3.2.1 数据筛选
通过Excel对已知数据进行筛选,得出12组空中目标ID、作战时间、经度、纬度以及高度,详见表1。
表1 空中目标极坐标
通过(5)式计算得到12个目标ID的坐标见表2。
表2 空中目标直角坐标
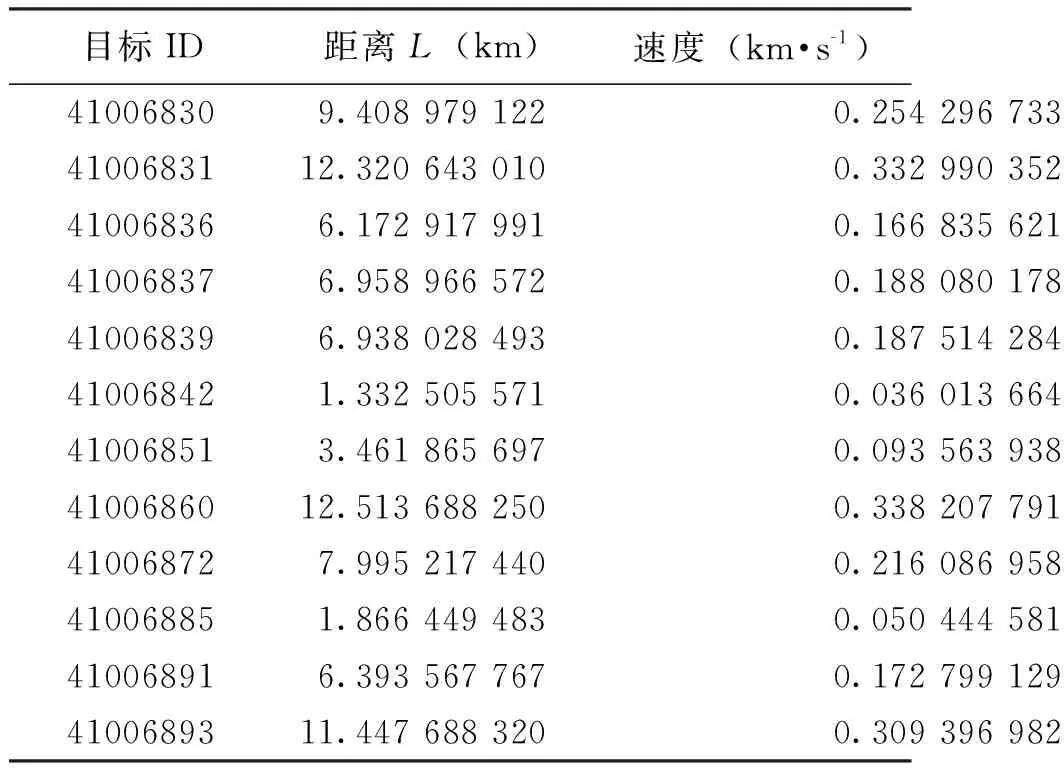
表3 空中目标飞行距离及速度
设每一个目标ID的起始地球坐标分别为Ai(α,γ),Bi(α′,γ′), 其中i=1,2,…,12。根据式(6)、(7)
cosδ=cos(α)*cos(α′)*cos(γ′-γ)+sin(α)*sin(α′)
(6)
β=δ*π*H
(7)
求得方位角β,见表4。
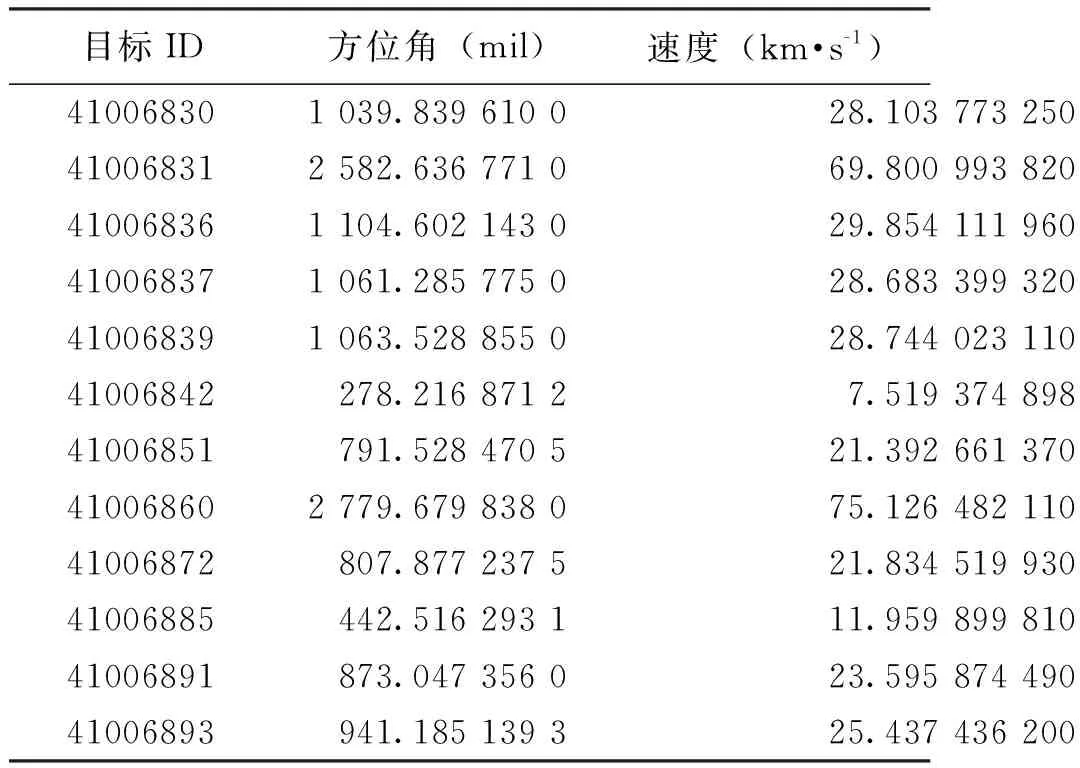
表4 空中目标飞行速度与方位角
3.2.2 目标识别
通过SPSS,以速度v和方位角β为指标将12批可疑空中目标进行聚类,聚类结果见图4。

图4 空中目标聚类结果
图4中1表示侦查,2表示攻击,3表示监视,具体情况分析如下:意图为侦查的目标ID共有8个,分别是41006830、41006836、41006837、41006839、41006851、41006872、41006891以及41006893;意图为攻击的目标ID有41006831、41006860;意图为监视的目标ID有41006842、41006885。
4 结 论
本文围绕水面舰艇编队防空和信息化战争展开讨论,在确定最佳探测距离的基础上推测出编队最佳队形,同时计算出编队在无预警机制以及有预警机制下的抗饱和攻击能力,为抵抗敌军侵袭做好充分准备。最后对空中目标意图进行识别,从而提高水面舰艇编队的作战技能和效率,希望对以后信息化战争模型研究提供借鉴。
猜你喜欢
舰船电子工程(2021年6期)2021-06-28
科学导报·学术(2020年26期)2020-10-21
语数外学习·初中版(2020年2期)2020-09-10
现代苏州(2019年16期)2019-09-27
作文大王·低年级(2019年6期)2019-08-01
妇女(2018年7期)2018-09-19
兵器知识(2017年10期)2017-10-19
军事运筹与系统工程(2017年1期)2017-07-31
兵器装备工程学报(2016年12期)2017-01-07
燕山大学学报(2015年4期)2015-12-25