北斗三号卫星钟差短期预报与稳定性分析
2021-08-07 05:48押少帅赵兴旺胡豪杰刘超陈健
全球定位系统 2021年3期
押少帅,赵兴旺,胡豪杰,刘超,陈健
(安徽理工大学 空间信息与测绘工程学院,安徽 淮南 232001)
0 引 言
全球卫星导航系统(GNSS)是基于时间测量的系统,准确的距离测量实际上就是时间测量[1].星载原子钟作为导航定位的星上时间基准,又是导航卫星的核心有效负荷之一,其性能直接影响导航定位精度[2],如时间系统上1 ns 的误差,导致3 dm 的距离误差[3].由国际 GNSS 服务(IGS)提供的最终星历,其钟差精度可以达到75 ps[4],但是这个产品要延迟12~18 天,不能用于实时定位.因此,如何利用较少的数据提高钟差的精度以满足实时定位的要求成为研究的重点.
目前,国内外许多学者对钟差的预报模型做了大量的研究,取得了丰富的成果.常用的模型有时间序列模型(ARIMA)[5]、灰色模型(GM)[6]、一次多项式(LP)模型[7]、二次多项式(QP)模型[8]、谱分析模型[9]和卡尔曼滤波模型[10].由于这些模型适应性不同[11],且原子钟受外部环境和自身特性的影响,很难找出适合所有卫星的钟差预报模型.近些年,一些学者用机器学习进行钟差预测得到了很好的精度[12-14],但是机器学习的方法需要设置许多参数,目前对参数的选取还没有一个科学的理论支持,需要不断的尝试才能找到最优参数,这是在机器学习算法中一个未完善的部分.随着北斗三号(BDS-3)的建设到全球组网成功,对BDS 系统原子钟的性能评估也成为一个热点.文献[15]对BDS-3 的原子钟进行了周期性分析和稳定性分析,文献[16]对BDS 系统原子钟进行了频率稳定性分析性,但它们只是选取了一部分卫星,没有对全部卫星进行评估.文献[17]基于北斗二号(BDS-2)的事后钟差产品对三种轨道卫星性能和预报精度进行了分析,为BDS-3 提供了一些有意义的结论.以上文献多数是对BDS-2 原子钟和预报模型进行研究,缺少对BDS-3 和不同原子钟类型的预报分析.
鉴于以上分析,本文在分析BDS-3 卫星钟的稳定性的基础上,选取LP、QP、GM、ARIMA 四种模型对钟差进行预报,总结了不同类型原子钟的预报精度,并且对预报模型的稳定性进行了评估.
1 卫星钟差预报分析
卫星钟差预报对实时导航定位应用具有重要的意义,然而预报精度受到模型适用性、原子钟稳定性等多方面因素的影响[18].因此,为了客观分析BDS-3卫星钟差预报的精度,本文对原子钟的频率稳定性和四种预报模型做了比较分析,以便在钟差预报时选用合适的模型.
1.1 卫星钟频率稳定性
卫星钟的稳定性是衡量卫星钟的输出频率随机起伏变化状况的一个指标.由于卫星钟的输出频率不是一个固定的值[1].BDS 卫星钟大多搭载的是铷钟,具有明显的频漂,因此,本文用Hadamard 方差对卫星钟的频率稳定性进行分析.
对于频率数据序列yn,n={1,2,···,M},其采样间隔 τ0,M为采样个数,基于频率数据的Hadamard 方差可表达为
1.2 卫星钟差预报方法
1)多项式模型通常是根据原子钟的相位、频率和频漂等时频特性来构造的,主要包括LP 模型、QP 模型.QP 模型的观测方程为:

对于星载原子钟频漂特性不明显的卫星,钟差预报模型可简化为LP 模型
2) GM 模型是将原始时间序列按顺序进行累加,使之形成具有明显特征规律的新序列,然后用一阶线性微分方程的解来逼近的过程[19],模型如下:

3) ARIMA 模型是通过对自回归模型(AR)和滑动平均模型(MA)进行组合,然后引入差分方法处理非平稳时间序列的预测模型[20].GNSS 卫星钟差序列具有明显的非平稳特征,ARIMA 模型能够很好地通过差分消除非平稳序列的趋势项和周期项,从而实现对处理后的钟差序列进行建模预报.基于差分数据的ARIMA(p,d,q)模型,记为{xt} ~ARIMA(p,d,q).其中 {xt} 是数据序列,p和q为模型的阶数,d为差分的次数.当d=0 时,即ARMA 模型为

式 中:ai、bj分别为自回归参数和滑动平均参数;{εt}~WN(0,σ2) 为白噪声(WN)序列;σ2为WN 方差.
以上模型具有不同的特性,因此在钟差预报时也会存在一定的差异性.如多项式模型具有计算简单、充分体现原子钟的物理特征和短期预报精度高等优点.但是,存在的预报误差会随着时间的累积迅速增大.灰色预测具有建模数据少,适合长期预报的优点,但在实际应用中,预报结果并不稳定,有时会造成巨大误差.ARIMA 模型存在模型识别和阶数确定的问题,当建模数据量较少时该模型的识别和阶数确定问题存在困难,因此ARIMA 不适合进行建模数据较少情况下的长期预报.
2 算例分析
2.1 实验数据及方案
自2019 年1 月1 日起,武汉大学开始提供BDS-3公开精密钟差产品(WUM),为BDS-3 参与多GNSS精密定位提供了产品基础,同时,该产品也为BDS-3卫星原子钟性能研究及钟差模型精化提供了数据支撑.为了分析不同卫星钟差预报模型在不同预报时长下的钟差预报精度,本文选用LP 模型、QP 模型、GM 模型、ARIMA 模型进行钟差预报.实验数据选取2020 年年积日151—180 天内采样间隔为30 s 的WUM 精密钟差产品.统计不同方案下的钟差预报精度.通过对比BDS-3 卫星所搭载的新型铷钟和氢钟在不同预报模型下的表现,分析适用于新型铷钟和氢钟的钟差预报模型,为BDS-3 钟差模型精化提供最优的基础参考模型.具体方案为:1)用Hadamard 方差评估卫星原子钟的频率稳定性时,采用不间断的数据进行计算;2)基于30 天的WUM 钟差数据,使用LP 模型、QP 模型、GM 模型以及ARIMA 模型进行拟合预报,即基于每天前12 h 的钟差数据拟合,预报后12 h 的卫星钟差,并按3 h、6 h 和12 h 三个预报弧段进行精度分析.以WUM 精密钟差产品为参考值,从均方根(RMS)、最大、最小误差差值两方面评价预报效果.由于在WUM 精密钟差产品中存在着相位跳变和数据缺失的异常情况,需要对BDS 卫星钟差数据进行预处理,采用数据分段处理钟差数据相位跳变,采用中位数(MAD)和Baarda 组合方法识别异常值,采用线性插值方法填补缺失数据[21].
2.2 卫星稳定性分析
图1~图3 分别给出了BDS-2 铷钟、BDS-3 新型铷钟、BDS-3 氢钟三种类型原子钟的稳定性随时间变化的趋势.从图中可以看出,三种原子钟的稳定性数值随着时间的增加而降低,且在千秒之前稳定性整体呈现线性变化.但是BDS-2 铷钟的稳定性在万秒之后出现非规律性变化,而BDS-3 的稳定性在2 000 s 之后开始趋于平稳,在万秒附近有一个明显的凸起,这是由于周期特性引起的[15],之后呈现出波浪状向下的变化趋势.
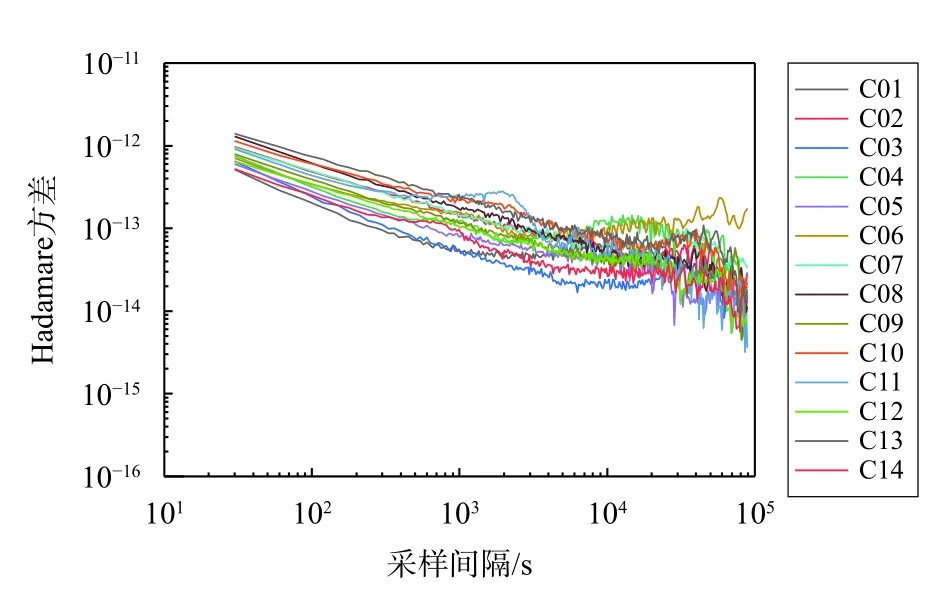
图1 BDS-2 铷钟的Hadamard 方差
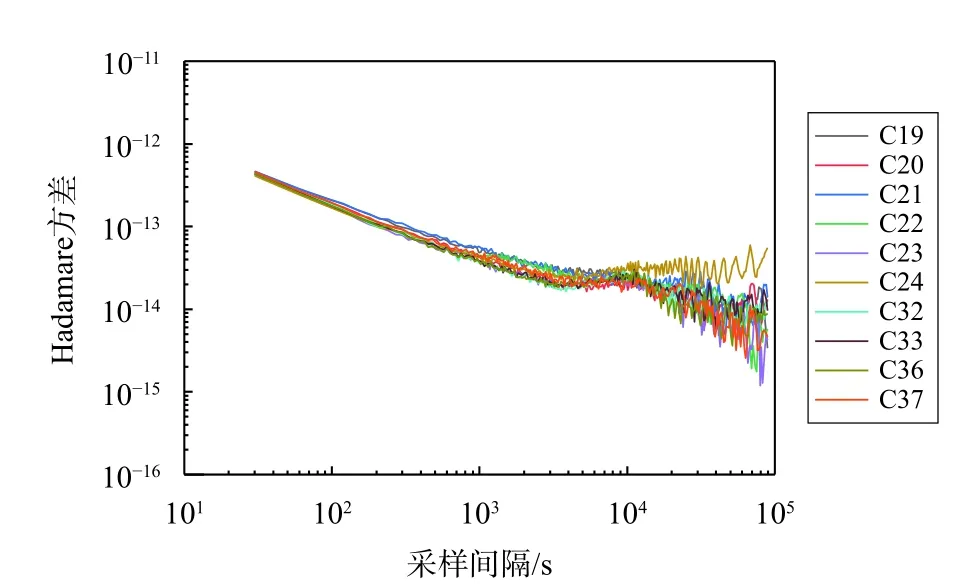
图2 BDS-3 新型铷钟的Hadamard 方差
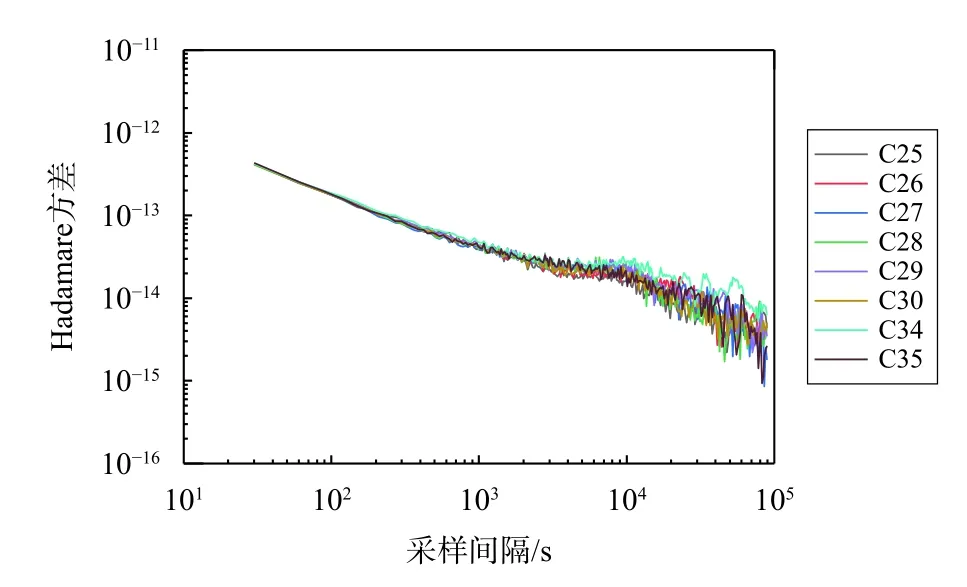
图3 BDS-3 氢钟 的Hadamard 方差
为了分析不同原子钟稳定性的高低,BDS-2 和BDS-3 每颗卫星的千秒稳定性、万秒稳定性和日稳定性,分别如图4、图5 所示.不同类型钟的稳定性统计结果如表1 所示.由图4 和图5 可知BDS-2 的千秒稳定性大多数都在10−13量级,万秒稳定性和日稳定性基本都在10−14量级;BDS-3 的千秒稳定性和万秒稳定性都在10−14量级,日稳定性大多数都在10−15量级.结合表1 的统计信息可以得出,BDS-3 氢钟的稳定性要优于BDS-2 的铷钟和BDS-3 的新型铷钟,其中BDS-2 的铷钟稳定度最差.BDS-3 新型铷钟和氢钟的千秒稳定性要高于BDS-2 铷钟一个量级;BDS-2、BDS-3 原子钟的万秒稳定性差别不大;而BDS-3 氢钟的日稳定性均为10−15量级远优于BDS-2 的铷钟和BDS-3 新型铷钟,尤其是C27 可以达到10−16量级.从稳定性的最大值最小值可以得出,BDS-2 铷钟在不同卫星间稳定性差异较大,BDS-3 氢钟的稳定性最好.对于BDS-2 的C06 卫星钟和BDS-3 的C24 卫星钟的日稳定性比千秒稳定性和万秒稳定性都要差这一反常现象,可能是由于C06、C24 卫星钟的数据不稳定导致的.
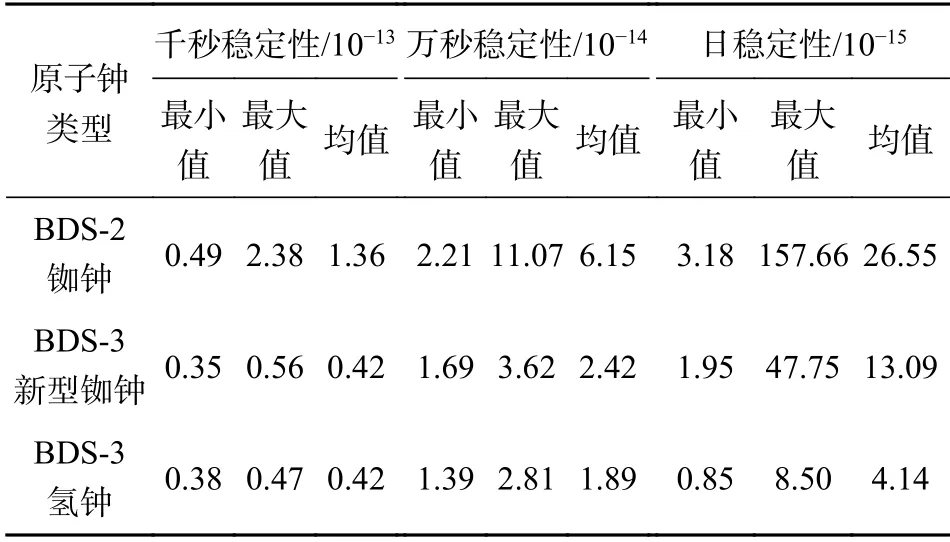
表1 频率稳定性统计结果

图4 BDS-2 的频率稳定性
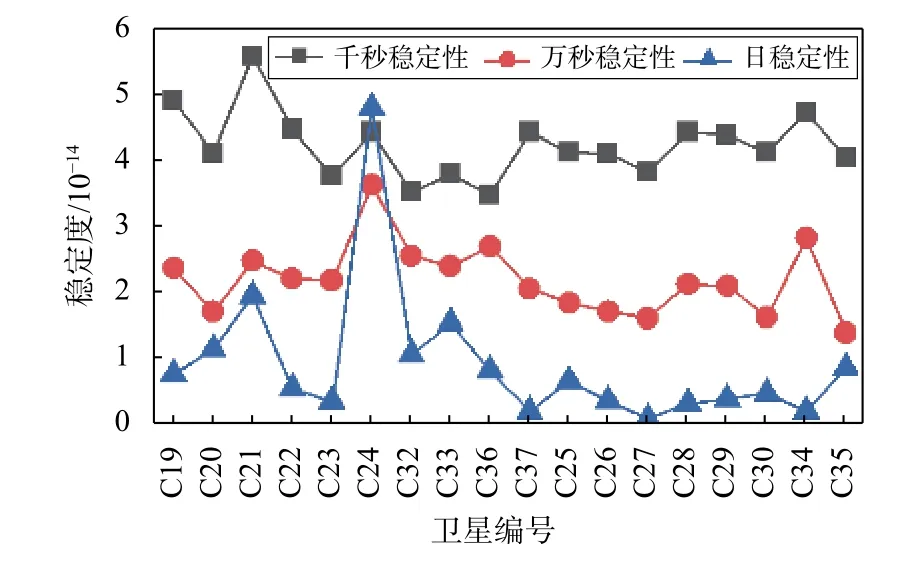
图5 BDS-3 的频率稳定性
2.3 钟差预报精度分析
图6~图8 分别给出了3 h、6 h 和12 h 预报时长,不同卫星原子钟在LP、QP、GM 和ARIMA 模型下的预报结果的RMS 值,箱型图为30 天的预报结果RMS 分布情况,其中灰色代表BDS-2 铷钟,黄色代表BDS-3 新型铷钟,红色代表BDS-3 氢钟.表2 给出了各类型原子钟在不同预报时长下各个模型预报结果RMS 的均值.

表2 四种模型不同预报时长下钟差结果RMS 均值 ns
由图6~图8 可以看出,在预报时长为3 h 下,BDS-3 氢钟的RMS 值在LP、QP、GM 模型下均处于0.5 ns 内,在ARIMA 模型下该指标可达到0.2 ns内,优于同模型下BDS-3 新型铷钟和BDS-2 铷钟.同样地,在6 h 和12 h 下BDS-3 氢钟的RMS 值优于BDS-3新型铷钟和BDS-2 铷钟.在不同模型下,BDS-3 新型铷钟要比BDS-2 铷钟的精度高,且BDS-2 铷钟在不同卫星间精度变化比较大,这可能是由于卫星在太空中运行,受到复杂的外部环境的影响,致使卫星钟的内部零件损坏和老化,因此卫星运行时间越长对原子钟影响越大.
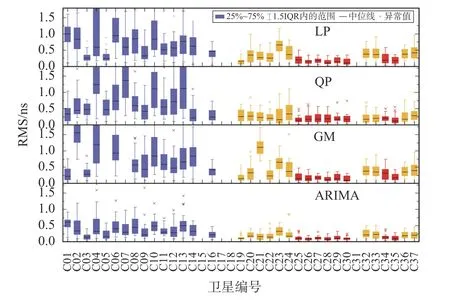
图6 四种模型3 h 预报结果RMS 值

图7 四种模型6 h 预报结果RMS 值

图8 四种模型12 h 预报结果RMS 值
由表2 所示,3 h 预报时长下BDS-3 氢钟各模型RMS 均值为0.17 ns,新型铷钟为0.34 ns,BDS-2 铷钟为0.88 ns;6 h 预报时长下BDS-3 氢钟各模型RMS均值为0.26 ns,新型铷钟为0.59 ns,铷钟为1.42 ns;12 h 预报时长下氢钟、新型铷钟及铷钟各模型RMS均值分别为0.44 ns、1.24 ns 和2.86 ns.因此,BDS-3所搭载的氢钟具有最优的预报精度,且在预报12 h情况下预报精度仍保持在0.5 ns 以内.
对不同原子钟的预报模型分析知,BDS-2 铷钟在不同的时间下ARIMA 模型预报精度最好为0.44 ns、0.76 ns、1.48 ns,GM 模型的预报精度最差为1.44 ns、2.16 ns、4.30 ns,ARIMA 模型的预报精度明显优于GM 模 型.BDS-3 新型铷钟在不同时间下,ARIMA 和QP 模型的预报精度分别为0.22 ns、0.47 ns、1.11 ns 和0.28 ns、0.50 ns、1.04 ns,这两个模型的预报精度相当且都优于LP 和GM 模型;随着预报时间的增加,QP 模型的预报精度要优于ARIMA 模型.BDS-3 氢钟在不同时间下,ARIMA 模型的预报精度都要优于其他三种模型.
Range 表示最大误差与最小误差的距离,体现了预报结果的稳定性.图9~图11 分别给出了3 h、6 h 和12 h 预报时长,不同卫星原子钟在LP、QP、GM 和ARIMA 模型下的预报结果的Range 值,表2 给出了各类型原子钟在不同预报时长下各个模型预报结果Range 的均值.
由图9~图11 可知,从Range 值的箱型图分布情况可以看出,BDS-3 氢钟的预报稳定性在四种模型下都优于BDS-3 新型铷钟和BDS-2 铷钟;四种模型的Range 值都在随着预报时时间的增加而增加;BDS-2 不同卫星的Range 值有较大的差别.BDS-3 氢钟在3 h、6 h 和12 h 下Range 均值为0.28 ns、0.47 ns和0.88 ns;相对于BDS-3 新型铷钟的0.45 ns、0.47 ns和2.25 ns,BDS-2 铷钟的1.20 ns、2.32 ns 和5.49 ns,四种模型不同预报时长下钟差结果Range 均值如表3所示.由表3 可知,BDS-3氢钟的预报稳定性远优于BDS-3 新型铷钟和BDS-2 铷钟.

表3 四种模型不同预报时长下钟差结果Range 均值 ns

图9 四种模型3 h 预报结果Range 值
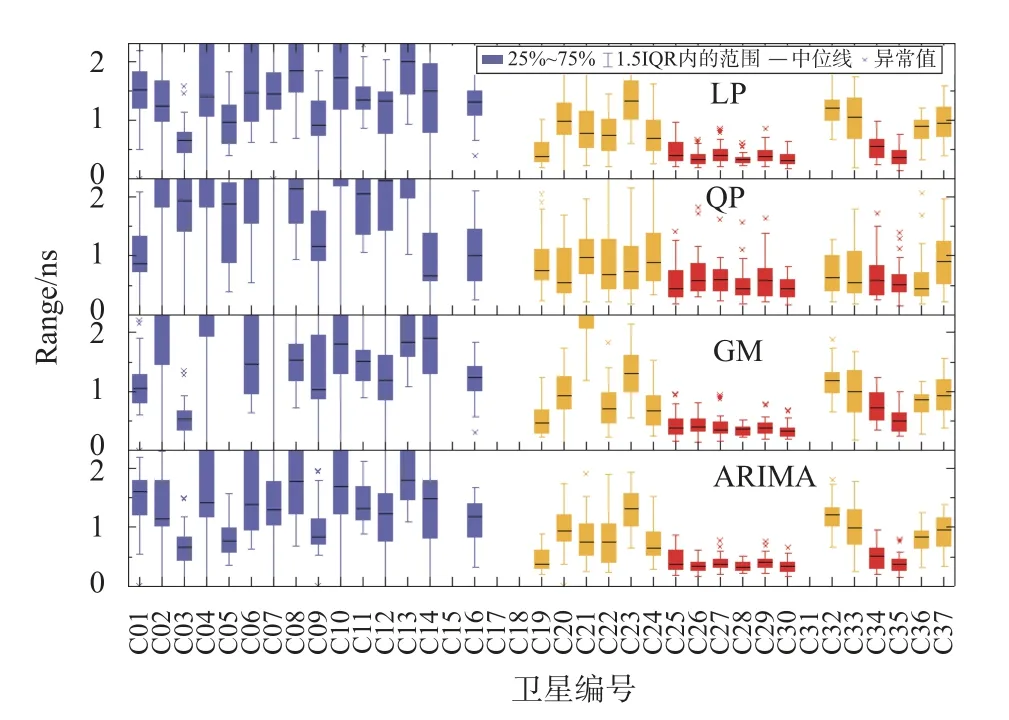
图10 四种模型6 h 预报结果Range 值
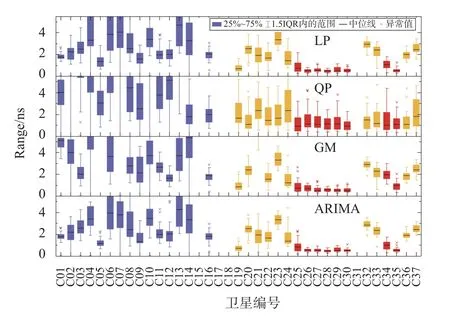
图11 四种模型12 h 预报结果Range 值
通过对比不同模型的Range 均值可知,LP 和ARIMA模型的Range 均值要优于QP 和GM 模型,这可能跟模型本身的特性有关.但对于BDS-3 新型铷钟,在不同预报时间下QP 模型的Range 均值为0.43 ns、0.86 ns、1.97 ns,要优于其他三种模型的Range 均值,这说明了QP 模型对BDS-3 新型铷钟进行钟差预报的稳定性要优于LP、GM、ARIMA 三个模型.
作为两个基础的预报模型,LP 和QP 在BDS-3不同类型原子钟预报的适用性问题更加值得注意.通过对比各个时长下,LP 和QP 模型在不同原子钟下的预报结果,可以看出,LP 模型更加适合做BDS-3 氢钟钟差数据预报,而QP 模型更加适合做BDS-3 新型铷钟.结合表2 和表3,在3 h、6 h 和12 h 预报时长下BDS-3 新型铷钟采用QP 模型进行预报的结果RMS均值为0.28 ns、0.50 ns 和1.04 ns,对应的Range 均值为0.43 ns、0.86 ns 和1.97 ns,优于LP 模型下RMS 均值的0.39 ns、0.63 ns 和1.27 ns,以及Range 均值的0.44 ns、0.94 ns 和2.22 ns;因此,BDS-3 新型铷钟采用QP 模型预报效果较优.在3 h、6 h和12 h 预报时长下,BDS-3 氢钟采用LP 模型进行预报的结果RMS均值为0.18 ns、0.23 ns 和0.35 ns,均优于0.5 ns,其对应的Range 均值为0.27 ns、0.41 ns 和0.68 ns,优于QP 模型下RMS 均值的0.20 ns、0.34 ns 和0.68 ns,以及Range 均值的0.32 ns、0.60 ns 和1.31 ns;因此,BDS-3 氢钟采用LP 模型预报效果较优.
由于BDS-2 与BDS-3 都搭载有铷钟,因此BDS-2铷钟的变化可以给BDS-3 新型铷钟一些有意义的参考.铷钟具有明显的频漂,因此对铷钟进行预测时采用顾及频漂的QP 模型要比LP 模型要准确,但是根据表2 和表3 统计的结果可以看出,LP 模型对BDS-2的预报精度和预报稳定性要优于QP 模型,而BDS-3新型铷钟的QP 模型优于LP 模型.因此可以得出,铷钟在运行一定时间后,用LP 模型进行钟差预报要优于QP 模型.
为了直观的了解三种原子钟在不同模型下的预报精度和稳定性,图12 给出了第156 天BDS 卫星钟差预报12 h 的偏差序列.可以看出在LP、QP、GM及ARIMA 模型中,ARIMA 模型具有最优的预报结果,GM 模型预报效果最差,LP 模型预报结果稍逊于ARIMA 模型,整体上优于QP 模型.结合表2 和表3,ARIMA 模型12 h 预报结果RMS 均值为0.96 ns,6 h预报结果RMS 均值为0.47 ns,在0.5 ns 以内;12 h、6 h和3 h 预报结果Range 均值分别为2.02 ns、0.97 ns和0.54 ns.相对于其他三种模型ARIMA 具有最优的预报结果,但是,该模型需要明确模型阶次和数据差分次数信息,灵活性较差.LP 模型在3 h、6 h 和12 h下预报结果RMS 均值为0.45 ns、0.64 ns 和1.12 ns,对应的Range 均值为0.56 ns、0.99 ns 和2.07 ns;其预报效果仅次于ARIMA 模型.QP 模型在3 h 时长下预报结果与LP 模型相当,但随着预报时长的增加,QP 模型精度较差.GM 模型短期预报效果稍逊于LP模型和QP 模型但相差不大,在3 h 预报时长下GM模型预报结果RMS 均值为0.7 ns,对应Range 均值为0.75 ns;在6 h 和12 h 预报时长下的精度与稳定性在四种模型中最差.

图12 四种模型12 h 预测偏差序列(DOY 156)
在建模时长为一定的情况下,预报误差会随着预报时长的增加而增加.整体上,BDS 卫星钟差在3 h、6 h 和12 h 预报结果RMS 值分别为0.46 ns、0.76 ns和1.51 ns,对应的Range 值分别为0.64 ns、1.25 ns 和2.87 ns.在进行定位应用过程中,卫星钟差存在1 ns的误差就会产生0.3 m 的等效距离误差,因此,仍需对基础钟差模型进行精化以满足高精度定位的要求.
3 结 论
本文基于30 天BDS 精密钟差数据,对BDS-2和BDS-3 的稳定性和不同预报时长下LP、QP、GM和ARIMA 四种模型的预报结果进行分析,得到了一些有益的结论,为BDS-3 卫星钟差模型精化提供了参考基础:
1) BDS-3 氢钟在三个时间段上的频率稳定性都是最优,其中千秒稳定性要比BDS-2 铷钟高出一个量级,在日稳定性上氢钟都达到了10−15量级,其中C27 达到10−16量级,要远优于BDS-2 铷钟和BDS-3 新型铷钟.
2) BDS-3 氢钟的预报精度和预报稳定性要优于BDS-2 铷钟,特别是BDS-3 氢钟的结果最优,在3 h、6 h 和12 h 下预报结果RMS 均值为0.17 ns、0.26 ns和0.44 ns,对应的Range 均值为0.28 ns、0.47 ns 和0.88 ns;在较长的预报时长下,BDS-3 氢钟仍能保持较优的预报精度和稳定性.这在一定程度上也说明了氢钟的频率稳定性越好,预报精度越高.
3) 对比四种不同模型预报结果,ARIMA 模型预报结果最优,GM 模型预报结果最差.对于BDS 整体而言,LP 模型在12 h 下预报精度为1.12 ns,优于QP 模型的1.88 ns.
4)本文对考虑原子钟物理特性的LP 模型和QP 模型在不同原子钟下的精度进行了比较,结果表明,BDS-2 的铷钟随着运行时间的增加更适合忽略频漂的LP 模型,此结论可以为BDS-3 钟差模型的进一步精化提供有利的参考.
致谢:感谢国际GNSS 监测评估系统(iGMAS)提供的数据.
猜你喜欢
导航定位学报(2022年5期)2022-10-13
机械工业标准化与质量(2022年8期)2022-10-09
海外星云(2021年9期)2021-10-14
科学24小时(2021年3期)2021-03-12
智富时代(2019年4期)2019-06-01
智富时代(2019年4期)2019-06-01
华东师范大学学报(自然科学版)(2018年3期)2018-05-14
发明与创新·中学生(2017年5期)2017-05-12
职业·中旬(2009年12期)2009-06-01
中学生数理化·高考版(2008年2期)2008-11-01