管道站场基础沉降远程在线监测评价系统设计
2021-08-20 08:03李玉坤廖昌建张子秀王东营彭启凤
中国安全生产科学技术 2021年7期
李玉坤,陈 帅,廖昌建,张子秀,王东营,彭启凤
(1.中国石油大学(华东)储运与建筑工程学院,山东 青岛 266580;2.国家管网集团北京管道有限公司,北京100000;3.中石化天津天然气管道有限责任公司,天津 300450)
0 引言
油气管道距离长、跨度大,其中许多站场不得已建立在稳定性差的地基上,经过长期运营后部分站场易产生不均匀基础沉降,可造成管道倾斜、变形及破环,对站场造成极大的安全隐患,危害巨大[1-2];由于站场面积大、管道复杂、基础分布不规律,不均匀基础沉降难以用肉眼分辨,当变形累积到一定程度后管道极有可能已经产生不可逆转的功能性障碍[3-5],或者处于事故发生的临界期。因此,目前亟需研究1种能够实时准确监测站场基础沉降的装置。
通过调研可知,站场基础沉降的检测采用专业人员定期检测的方式,即在一定检测周期内布置多台精密全站仪对基础进行测量[6];根据相关标准和测量数据给出评价结论。但人工定期检测的成本高且检测间隔时间长,往往不能及时发现站场存在的安全隐患。目前国内外对站场基础沉降实时监测的研究较少[7-10],油气站场作为1类特殊的建筑物,可借鉴其他建筑物沉降检测的先进技术,探索1种适用于监测站场基础沉降的方法[11-14]。目前常见的3种检测与分析技术的简介以及优缺点对比,如表1所示。
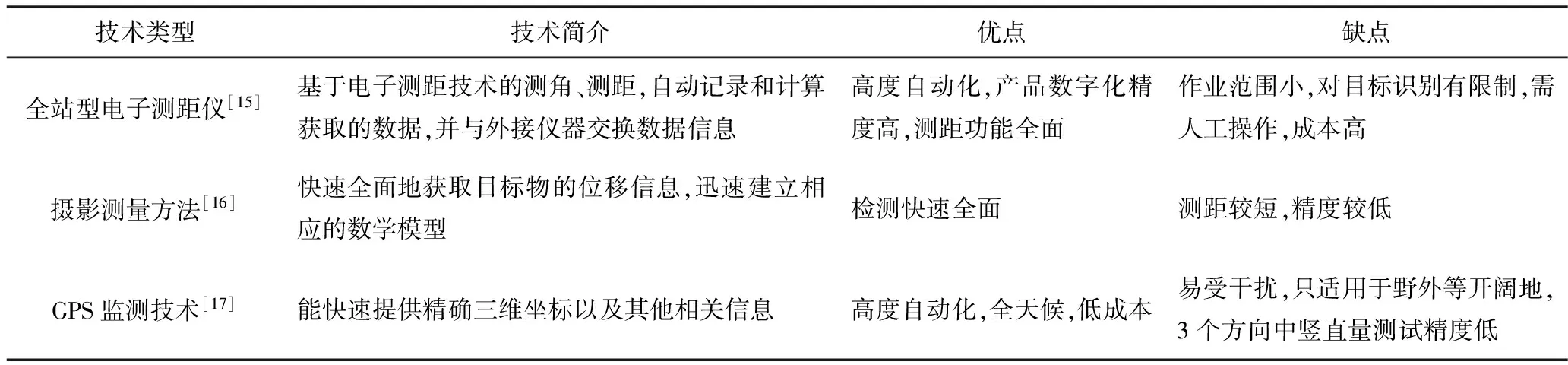
表1 常见3种检测与分析技术对比
对比可知,全站仪测距技术较为成熟,但需人工现场操作且成本较高,通常在检修期内进行一次性的沉降量测量,不适用于站场基础沉降的实时监测。因此,本文研制1套适用于站场基础沉降实时监测的系统,对站场安全运行具有重要价值。
1 系统设计思路
站场基础沉降远程在线监测评价系统总体包括硬件与软件2大部分:硬件部分完成现场数据采集工作;软件部分完成数据的处理及站场运行状态的评估和预警。
1.1 硬件部分
硬件部分如图1所示,部件包括:步进电机、激光测距模块、激光测距模块固定装置、上顶板、下底板、电路控制板、电池、套筒、碰撞开关、碰撞开关固定装置、电池固定装置、开关与充电头固定装置。各部件采用螺丝固定,电路控制板采用ATMEGA2560作为主控芯片。
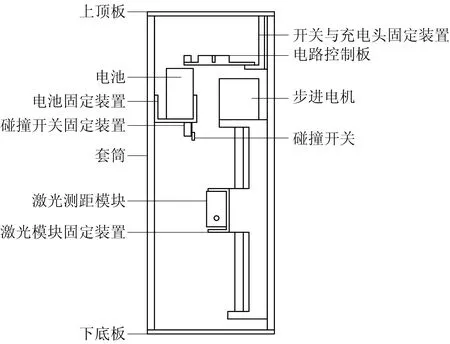
图1 站场基础沉降监测装置硬件部分结构
脉冲信号控制步进电机带动激光测距模块从初始位置逐步向下移动,且每产生1次脉冲,主轴可旋转18°,带动激光测距模块下移0.1 mm。
系统由脉冲个数推算激光测距模块下降的距离;步进电机的步距角和测得的距离信号一一对应,精度可达±0.1 mm;当步进电机下降到标识物下方时记录数据并回到初始位置;单片机筛选、记录有效距离信息,并通过无线通信模块发送给主机,1个周期结束;其工作流程如图2所示。
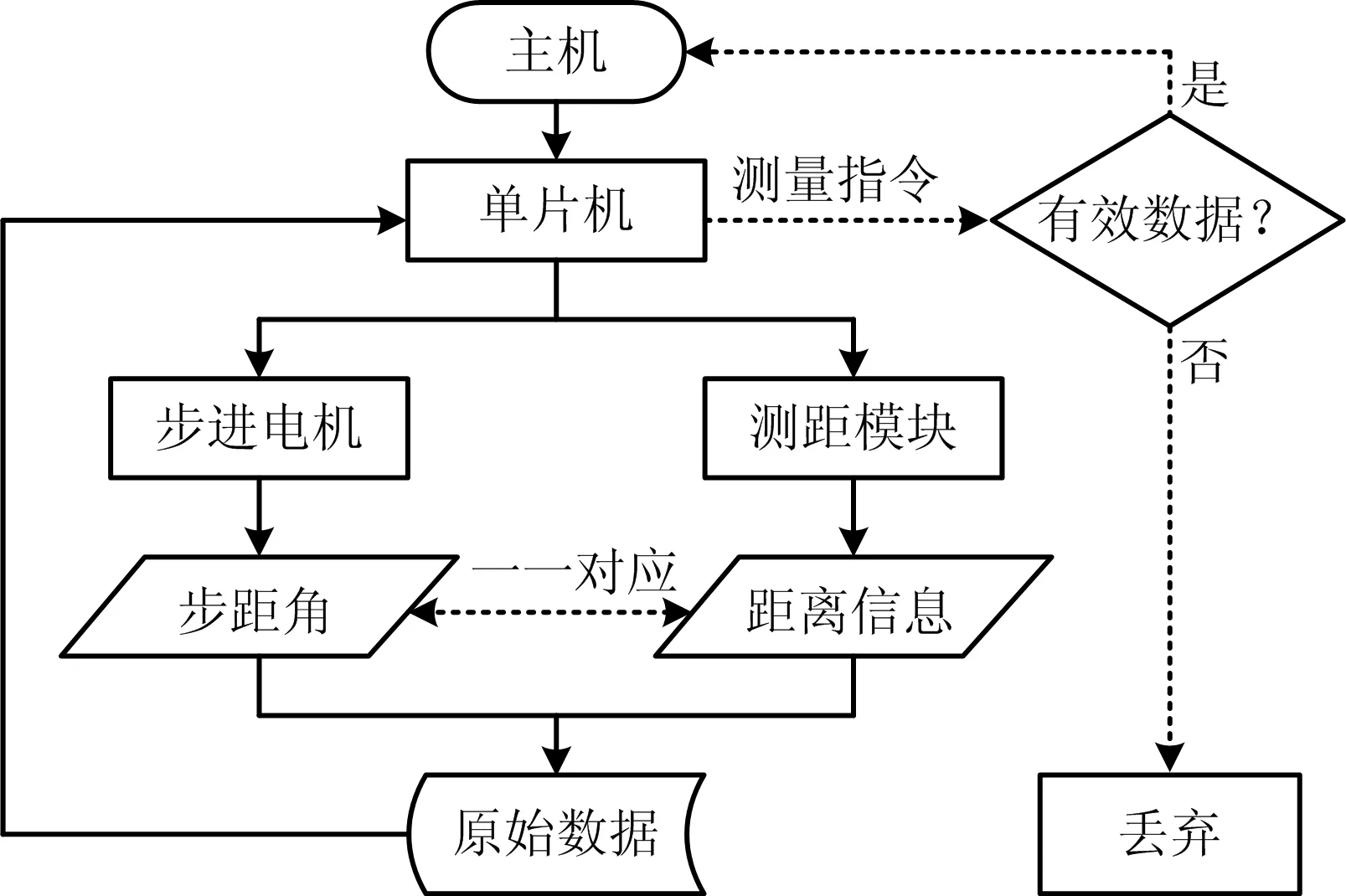
图2 站场基础沉降监测系统工作流程
硬件部分实现自动化可对数据进行实时采集,让站场每个基础都处于全天候的监测。
1.2 软件部分
为提高装置自动化水平,本系统开发了1套集数据处理与安全评估预警功能于一体的软件,具体工作流程如图3所示。后台由处理程序和评估程序组成,负责对无线通信模块传来的原始数据进行处理和评估。
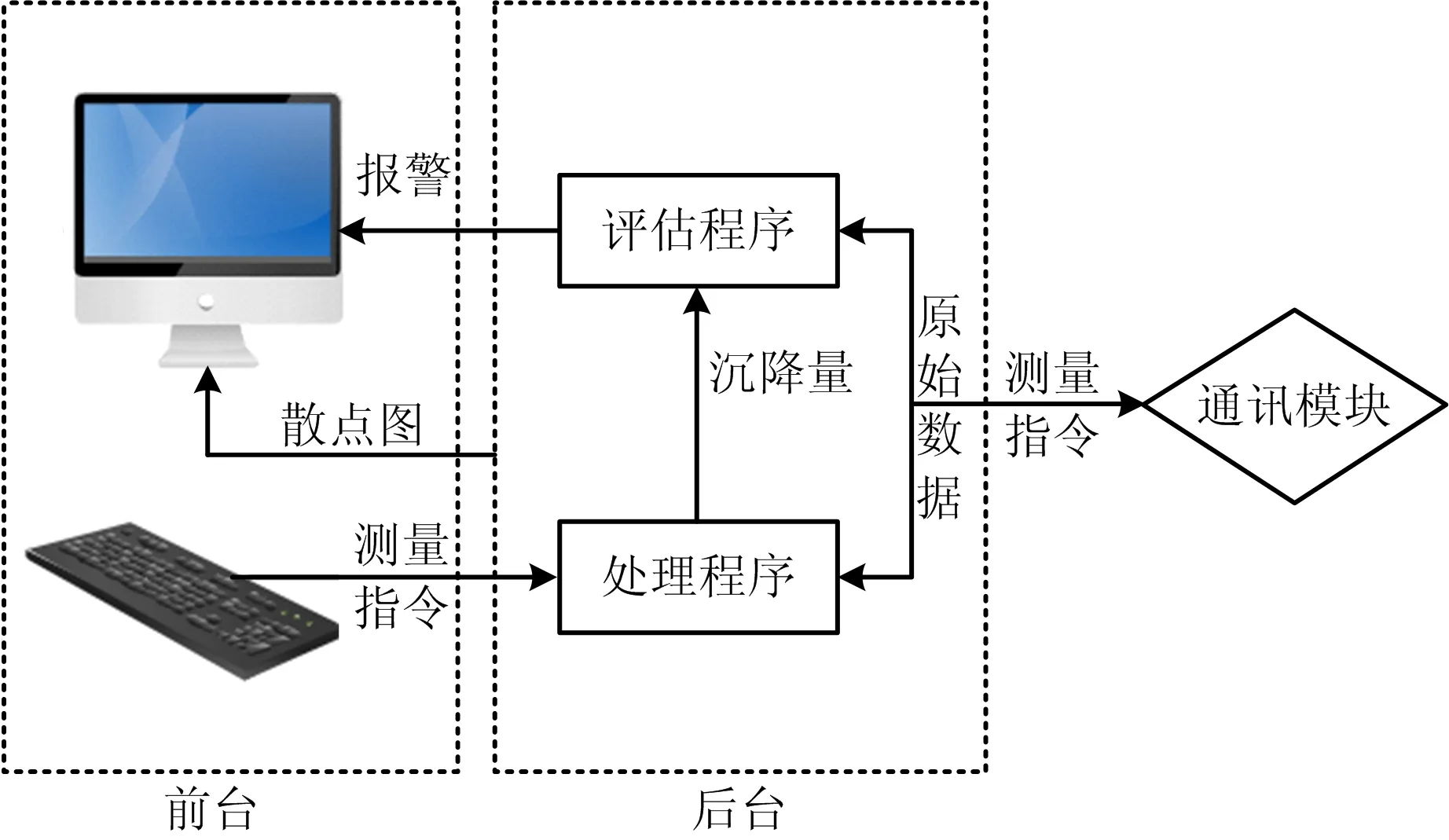
图3 软件部分结构图及处理流程
前台操作人员发出测量指令后,无线通讯模块启动硬件,硬件采集距离信息,并返回原始数据交由处理程序处理,得到站场基础沉降量,评估程序评估沉降量并进行预警。
数据处理方法如图4所示,根据对应步进电机的步距角,处理程序可得到垂直位移,以垂直位移为横坐标,激光测距模块测得距离为纵坐标绘制曲线;取照射在方形标识物上所有点的横坐标求平均值,得出位移评估点Dn坐标;与历史数据比较,可得站场基础的沉降量。
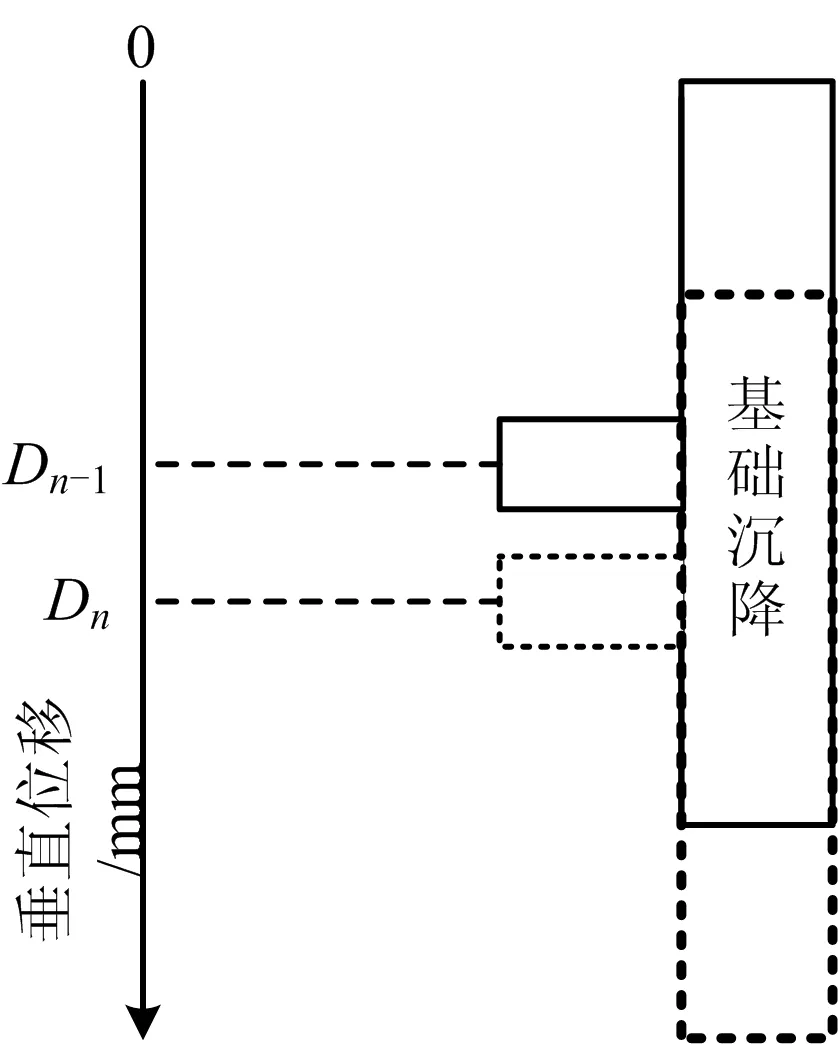
图4 站场基础沉降监测部分数据处理
运行评估方法:假定给某站场所有基础共设置m个观测点,记作1,2,3,…,m,则站场沉降量的计算公式如式(1)所示:
Δm=Dmn-Dm1
(1)
式中:Δm为标志物的相对沉降量,mm;Dm1为第m个装置第1次测得位移评估点坐标,mm;Dmn为第m个装置第n次扫描测得位移评估点的坐标,mm。
将Δm与预设临界值δ比较,若大于临界值,则系统发出相应警告。
预警方法:建立基于历史沉降观测数据的一元线性回归预测模型,如式(2)所示:
(2)

在模拟实验条件下,采用前n(n≥q)次实验所得数据作为样本,计算一元线性回归参数的估计值。解正规方程组,如式(3)所示:
(3)
式中:yi为系统测得沉降量,mm;xi为监测次数;a,b为未知常数。
得到a,b取值,进而确定线性回归方程。
软件部分分析所得数据对基础进行评估,并根据一元线性回归预测模型预测基础的沉降量,将预测值与临界值δ进行对比,超过任一对应临界值则系统预警,即下一检修期内需要对站场做相应检修。其中临界值δ的设置依据:
1)总结国内外由于站场地基沉降、管道变形等因素引起站场故障的相关研究成果和工程实例,相关因素导致站场变形破坏的极限工况;
2)通过建立站场基础与管线的等比例有限元模型,得到不同基础在不威胁管线安全情况下的最大沉降量。
1.3 系统集成
站场基础沉降监测系统的具体工作过程:装置安装完毕后打开配套软件,配置各项参数。被监测基础安装位置标识物如图5所示。装置在接收主机发送的测量指令后,开始按预先烧录的程序依次执行复位、下移测距、数据存储;激光测距模块在步进电机带动下缓慢下移,激光照射至标识物上不同点并记录距离信息L1,L2,L3,…,完成1个周期扫描后回到初始位置;单片机接收、储存该周期内扫描得到的距离信息,并通过无线通信模块发送到控制室主机,软件系统分析得到基础沉降量,进而对站场的运行状态做出评估和预警,如图6所示。
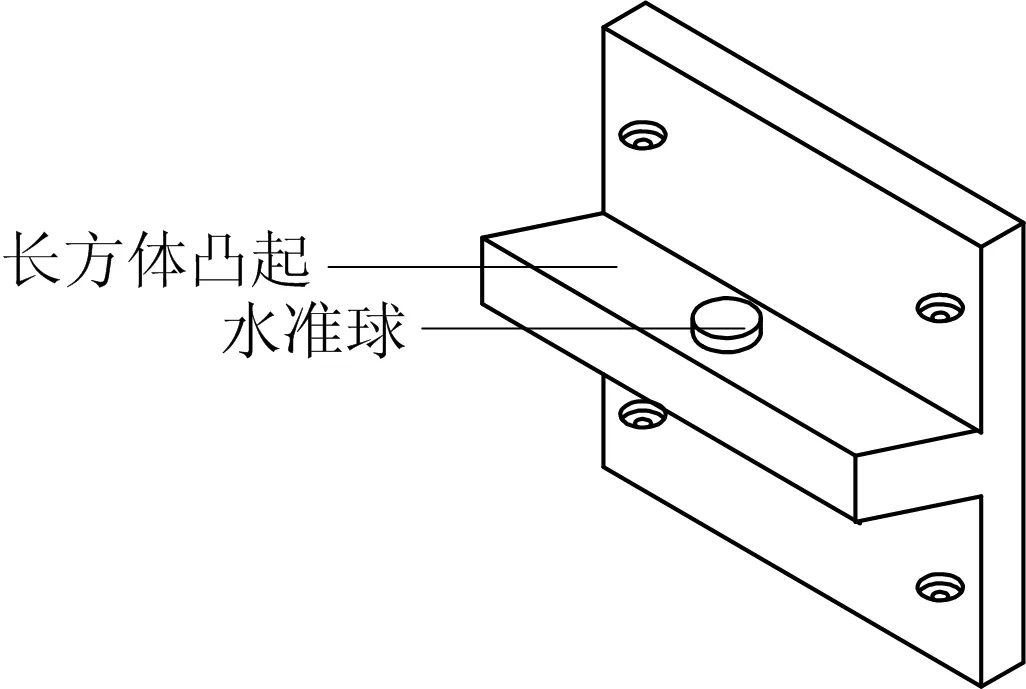
图5 位置标识物

图6 站场基础沉降监测装置原理
2 装置最远监测距离实验
激光测距模块的精度与测量距离有关,为确保系统测量数据的准确性,需评定该系统在保障测量精度前提下的最远测试距离。
进行现场测试如图7所示,选择3个站场基础进行实验模拟。共设置3个观测点,如图8所示,通过改变沉降监测装置位置模拟监测距离的变化。
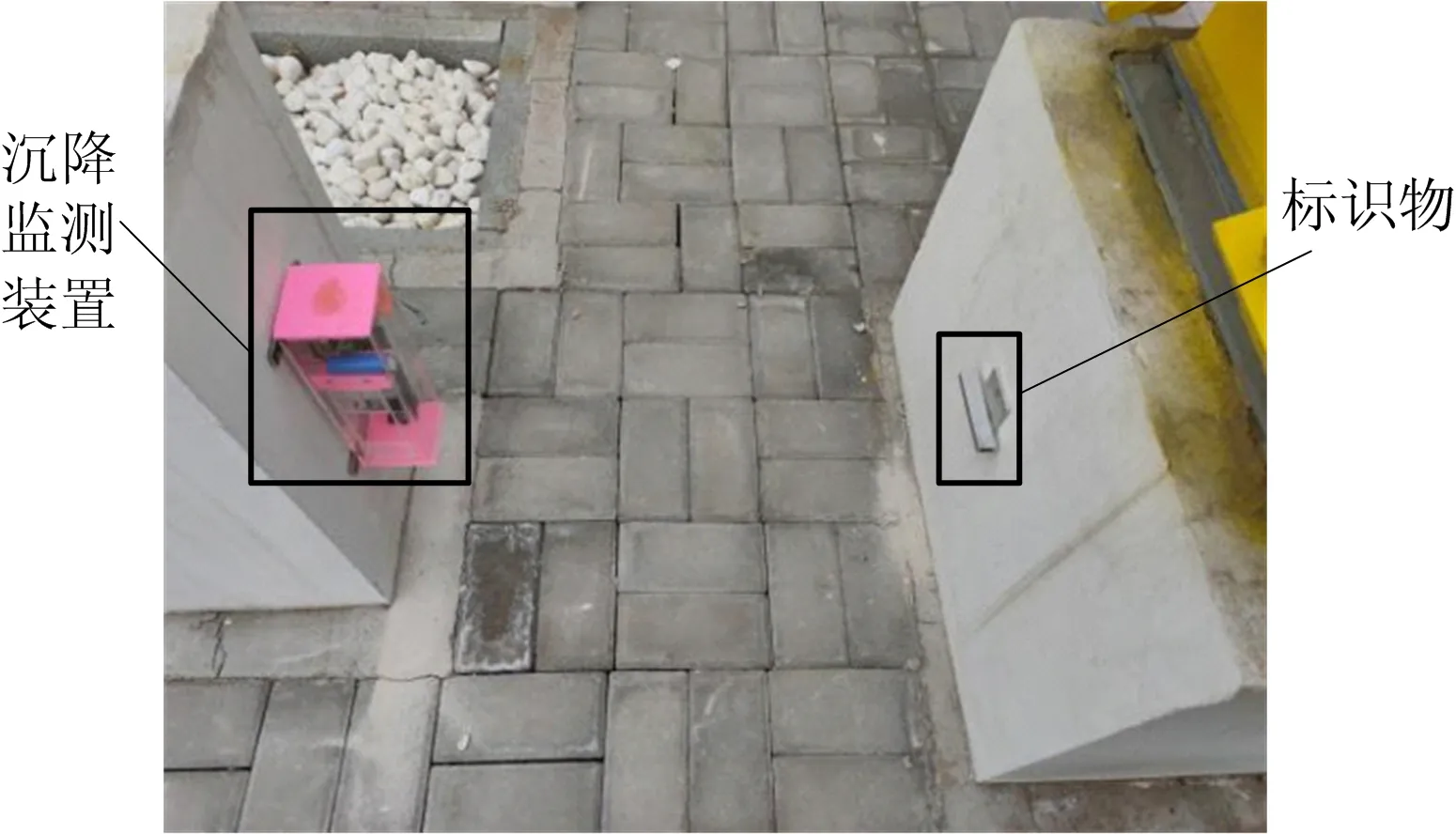
图7 现场测试

图8 观测点布置示意
位置标识台安装在基础上,如图9所示,通过调整标识物安装高度模拟基础沉降。
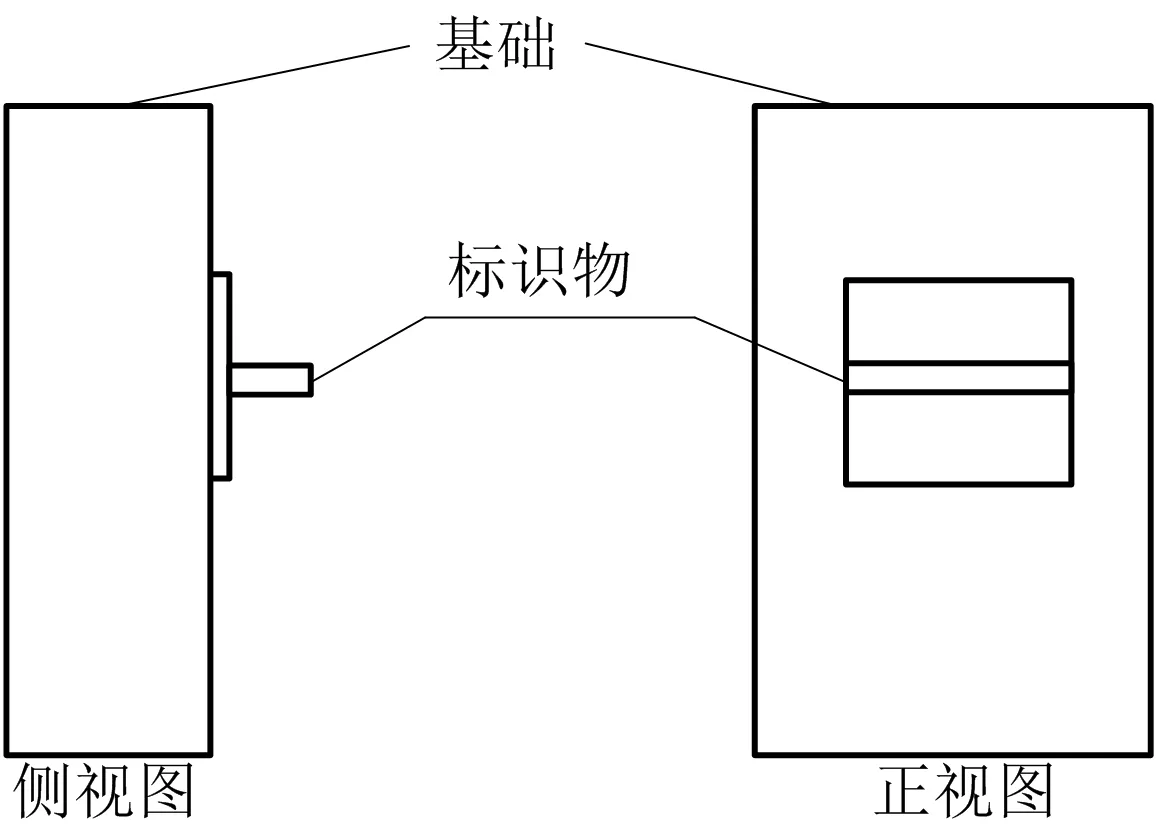
图9 位置标识台正视图与侧视图
在距位置标识物一定距离S处安装站场基础沉降监测装置,位置标识物依次下降一定距离d,每次下移后,启动装置,测量标识物下降距离,得到不同S下的测量值d′,与真实d对比,计算相对误差δ并作图分析,如图10所示。
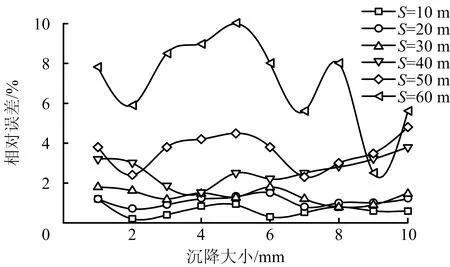
图10 不同距离S下的相对误差对比
当S≤50 m时,相对误差δ<5%,在误差允许的范围内,系统测得沉降值d′与位置标识物实际下降值d一致;当S>50 m时,相对误差δ≥5%且波动较大,即系统测得沉降值d′与位置标识物实际下降值d相差较大。说明系统所测数据的准确性与装置和标识物的距离有关,距离越远误差越大,且在距离S>50 m时,测量数据精度低,可靠性差,所以本装置测点距离装置不应大于50 m。
3 站场基础沉降模拟监测实验
站场投入运行后实际沉降速率较慢,为保证模拟实验快速有效进行,将沉降速率加快、测量周期缩短,设置测量周期为T=1 h。结合规范和模拟实验要求,设置预设临界值δ1=133 mm,δ2=30 mm,v=10 mm/h,并将其输入系统中。标识物下降dmi(i=1,2,3,…,n;m=1,2,3,4)后,获取此时标识物的位移评估点坐标;系统将获取的位置信息进行处理,得到相应时间间隔内的沉降量Dmi,如式(4)所示:
(4)
式中:Δmmax为m观测点n次扫描后的最大相对沉降量,mm;Δ2max为相邻观测点最大相对沉降量,mm;vmmax为观测点最大沉降速率,mm/s;q为初始沉降量,mm;Δ(m-1)max为m-1观测点n次扫描后的最大沉降量,mm;Dmi为m装置i次扫描测得位移评估点的坐标,mm;T为测量周期。
为确保该系统对站场基础沉降量进行有效的安全监测,还需对下一检修周期各观测点的沉降量进行预测。以某1观测点为例,前10次测得数据如图11所示。在第10次测量后,系统根据历史数据预测出第11个周期观测点1的沉降量,并结合所预测的沉降量和其他观测点的预测沉降量,判断下个检修期内是否需要对站场进行维护。
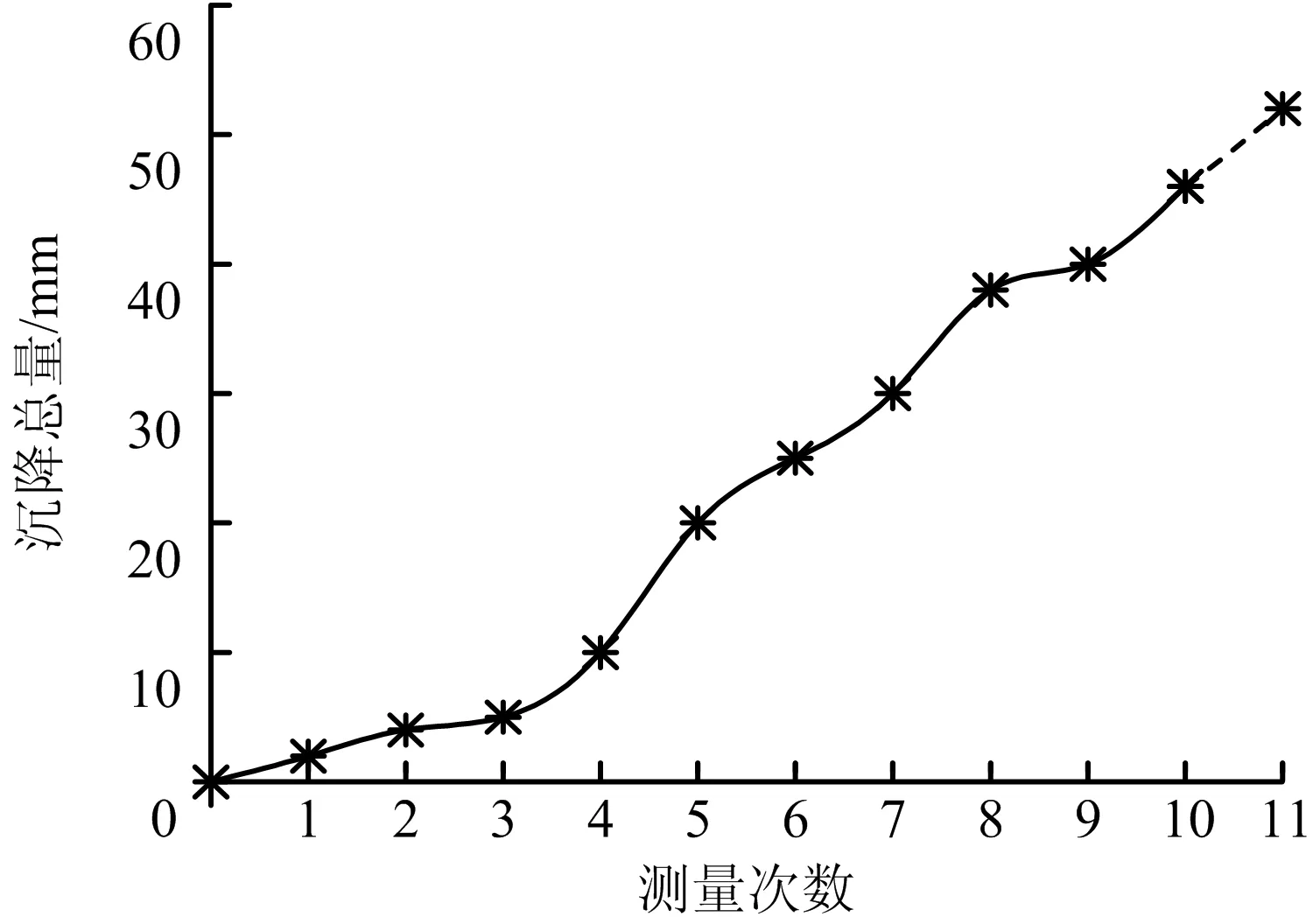
图11 观测点1数据记录与预测

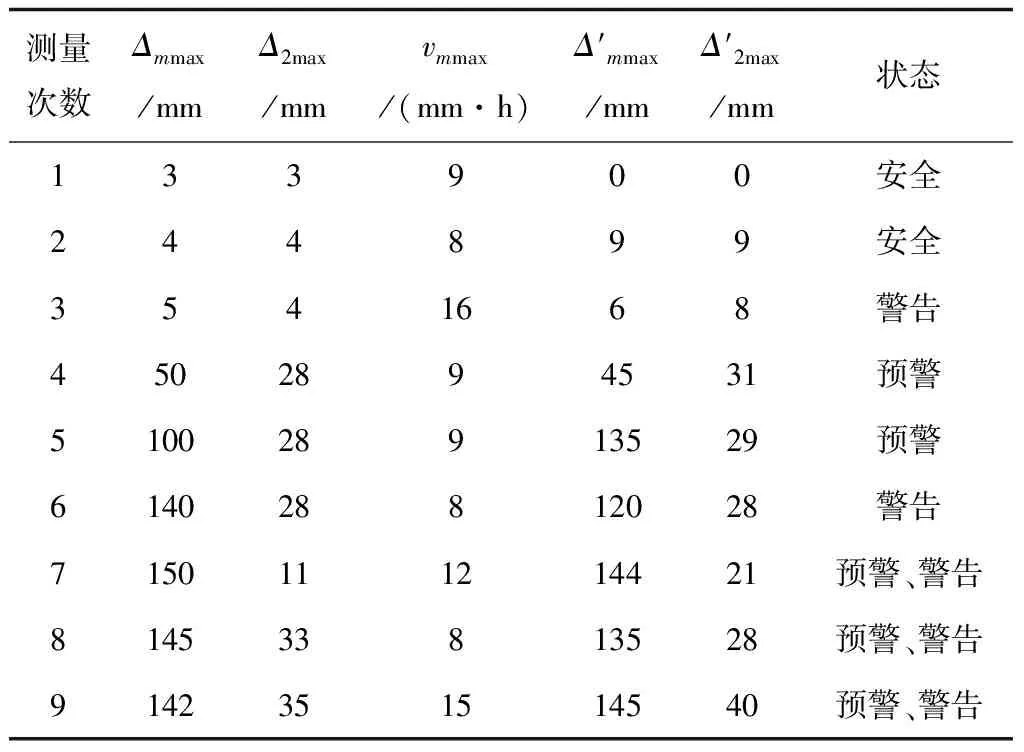
表2 评价系统数据记录
4 结论
1)管道站场基础沉降远程在线监测评价系统通过激光测距扫描标识物,记录标识物的位置信息,比较位置信息的差异监测标识物所在基础的沉降量。
2)系统安装方便、运行可靠、便于现场应用,能够准确监测站场基础沉降,通过实验得出站场基础沉降远程在线监测评价系统的有效监测距离为50 m,测量误差不超过5%。
3)经过模拟监测系统可稳定运行并作出预警,系统不仅可应用于站场基础沉降监测,还可广泛应用于其他重要大型建筑物沉降监测领域,为其他同类监测问题提供有效参考。
猜你喜欢
有色设备(2021年4期)2021-03-16
现代农村科技(2021年2期)2021-03-15
绿色科技(2019年12期)2019-07-15
小学生导刊(2018年34期)2018-12-18
山东青年(2016年3期)2016-02-28
铁路技术创新(2015年3期)2015-12-21
山东建筑大学学报(2015年4期)2015-05-11
母子健康(2015年1期)2015-02-28
延河(下半月)(2014年3期)2014-02-28
铁路通信信号工程技术(2014年6期)2014-02-28