基于解析算法的联合打击网快速任务规划
2021-08-26 09:09李云鹏张小伟董腾飞
指挥控制与仿真 2021年4期
李 坎,李云鹏,张小伟,董腾飞
(陆军步兵学院石家庄校区,河北 石家庄 050227)
随着科学技术快速发展,部队通信、火力、侦察等装备技术性能愈来愈强,如何发挥其作战能力、充分组合作战资源提高作战效能,成为当前亟待解决的问题[1]。以部队作战演习情况为例,目前部队作战任务规划还停留在靠指挥员和参谋人员通过定性讨论分析确定方案计划的阶段;在实际执行任务的过程中,经常出现某任务分队发现敌情,由于没能及时作出决策,错失最佳打击时机的情况;在分配任务时经常出现某分队或作战单位任务饱和,或时间空间发生冲突等情况。因此,改进作战部(分)队任务规划现状,提高定量分析规划的能力,迫在眉睫。
当前,国内外关于作战任务规划的研究较多[2-3],但是很多聚焦于智能算法[4-5]。基于解析算法的作战部队联合打击网快速任务规划方法研究,旨在探索未来战争新型作战概念和作战能力生成模式,解决当前基层部队指控作战能力受限、作战资源利用效率不高、任务规划能力欠缺等问题,改进基层部队传统作战理念,改进作战筹划中定性分析为主导的传统思维方式,将启发式解析算法引入作战应用,依托当前部队应用最为广泛的Excel实现该任务规划模型方法的设计开发和部署应用,具有运算快速性、开发成本低、易安装部署、易操作应用等特点,以最为简单实用的解析方法代替人工计算,对于推动运筹方法和优化技术在基层部队的作战应用,提升部队整体作战效能具有重要参考意义和借鉴价值。
基于解析算法的作战部队联合打击网快速任务规划方法工具,是为独立作战部队构建一个辅助任务规划的方法和工具。一是统筹全局作战资源,辅助指挥员和参谋人员实时动态地把控各参战要素交战状态和战技性能;二是精准优化任务部署,统筹利用各武器平台和作战单元的优势能力,通过启发式解析算法,将资源调配到各个交战阶段和指挥过程,实现各任务阶段和作战资源的优化配对、快速部署,以最小化完成作战任务所需时间;三是实时把控作战进程,通过算法工具精准计算,采用类似开放式车间和混合流水线的理念,针对每个作战任务进行快速规划评估,形成打击进程时间表,减轻人工计算压力,以甘特图的样式,清晰呈现打击网作战进程计划图,提高实时把控作战进程的能力。
1 联合打击网
随着信息技术快速发展,作战部队信息共享、态势融合技术逐步成熟,单个作战单元、武器平台综合作战能力稳步提升,发挥各个参战要素、武器平台的作战优势,集成整合、灵活运用各要素的能力优势,构建作战部队联合打击网,形成统一的作战能力,成为提升部队未来作战能力的重要趋势。
1.1 打击任务阶段划分
基于作战部队各平台单元信息共享前提,规范指控流程,将作战过程进行拆分,参照美较为常用的杀伤链模型[6-7],即发现、锁定、瞄准、跟踪、交战和评估(F2T2EA),将打击过程拆分组合为探测、跟踪、识别、批准、发射、控制、评估等阶段,如表1所示。
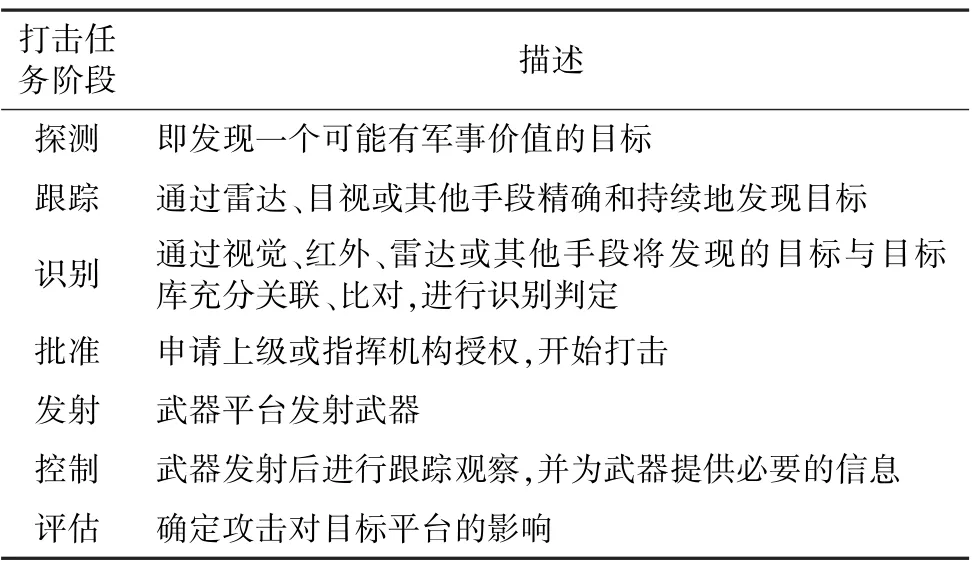
表1 打击过程中各任务阶段划分与描述
第一阶段是“探测”,平台尝试探测感兴趣的目标,当一个平台探测到一个目标时,就会与和其有数据链接的所有平台共享数据信息。
第二阶段是“跟踪”,组合了原模型中的“锁定”和“追踪”阶段,因为持续跟踪目标已经包括初始锁定。跟踪意味着持续获取目标的位置信息,确保有足够的精度能够摧毁目标。
第三个阶段“识别”是指平台将目标与预期目标进行关联对比的一致程度。识别在目标跟踪开始后开展,并且必须在批准攻击之前结束。
“批准”是指报请上级机关批准,释放弹药进行打击,审批使用一个非常复杂的通信网络。本文中,我们假设更高的权力自动、即时地给予批准,但这是对现实的粗略估计。
“发射”,一旦己方平台探测到目标,精确定位它的位置,并对其进行识别,收到打击授权后,平台发射武器对目标进行打击。
在“控制”阶段,平台发射武器后,武器可能需要进一步飞行,需要获得目标更新信息的支持。控制阶段到武器冲击目标后结束。为了确定攻击成功与否,己方平台必须联合进行作战毁伤效果评估,将此称为“评估”阶段。
1.2 联合打击网构建
由于联合打击任务涉及多个任务阶段,且各个任务阶段可由不同作战平台和作战单元分别执行,借助作战部队不断完善的指挥通信网络以及信息共享和态势融合能力,可将联合打击过程涉及的作战资源灵活组合,构建涉及不同作战单位和武器平台的联合打击网。
在联合打击网内,部队执行这些打击任务的组合调度问题非常类似于工厂制造车间流水线的分配调度问题。针对某个目标的某一任务阶段只需要一个作战平台的武器单位去执行,如侦察发现目标可由侦察分队的传感器完成,火力打击由炮兵分队完成,毁伤评估由无人机分队完成等。该武器单元执行某个任务阶段时不能再执行其他任务阶段。且针对某一目标的打击任务必须按照任务阶段顺序依次执行。
通过统筹各参战单元位置、武器性能、任务状态等,全局规划参战要素的调配使用,不同交战阶段由不同任务平台或作战单元完成,充分发挥各要素作战优势,提高作战资源利用效率,尤其针对时敏目标,确保有效完成打击任务,提升整体作战能力。借鉴网络中心战、马赛克战、分布式作战等新型作战概念,采用类似开放式车间和混合流水线的理念思想,构建涵盖所有武器单元的联合打击网,将各平台、单元和要素相互连接成一个网络,集传感器、武器、通信于一体,通过网络中所有平台的合作获得信息优势,提高可用资源的互操作性,进而转化为提高总体任务效能。
2 启发式快速任务规划模型设计
基于启发式解析算法的打击网优化工具,采用类似开放式车间和混合流水线的理念,将资源调配到各个交战阶段和指挥过程,实现各任务阶段和作战资源的优化配对、快速部署和评估。
假设作战中信息在不同参战单元和武器平台之间完全共享;打击过程中任务阶段转换不需要时间间隔;若目标在平台及其相关传感器的最大探测范围内,识别率为100%;若目标在武器可攻击范围内,命中率为100%。将作战资源和参战要素归纳为作战单元(平台)、武器、目标及作战阶段等。
2.1 参数说明
p∈P为作战单元(平台);
t∈T为作战目标;
w∈W为武器;
f∈F为各个作战阶段;
F={发现,跟踪,识别,打击,评估};
(f,f′)∈Pr ecl ud e为同一平台不能同时执行的作战阶段;
Nump,f为在f阶段中p平台能够独立执行的最大目标数;
tp,t,f为针对t目标平台p执行f阶段所需的最短时间;
Tp,t,f,t′,f′为平台p在t目标上执行f阶段转移到在t′目标上执行f′阶段所需要的时间;
Np,w为平台p可以携带的武器最大数量;
vp为平台p速度;
rp,f为平台p在执行f阶段时可以作用的最大距离;
Dt,t′为目标t和t′目标的距离。
易得,Tp,t,f,t′,f′=(rp,f+Dt,t′-rp,f′)/vp。
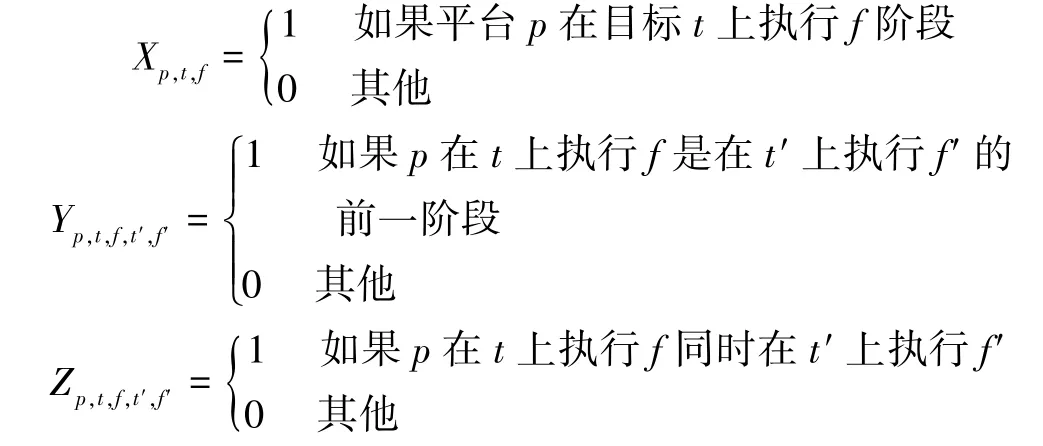
2.2 决策变量
Tp,t,f,start为平台p在t目标上执行f阶段的开始时间;
Tp,t,f,end为平台p在t目标上执行f阶段的结束时间。
2.3 优化模型
目标(1)表示最后完成打击过程的总时间。
约束(2)确保了总体完成打击时间在完成对目标的“评估”阶段之后。
约束(3)确保了在任何平台完成当前阶段之前,不会开始执行下一阶段。
约束(4)确保针对目标的一个作战阶段的持续时间不超过执行该阶段所选择平台的最小处理时间。
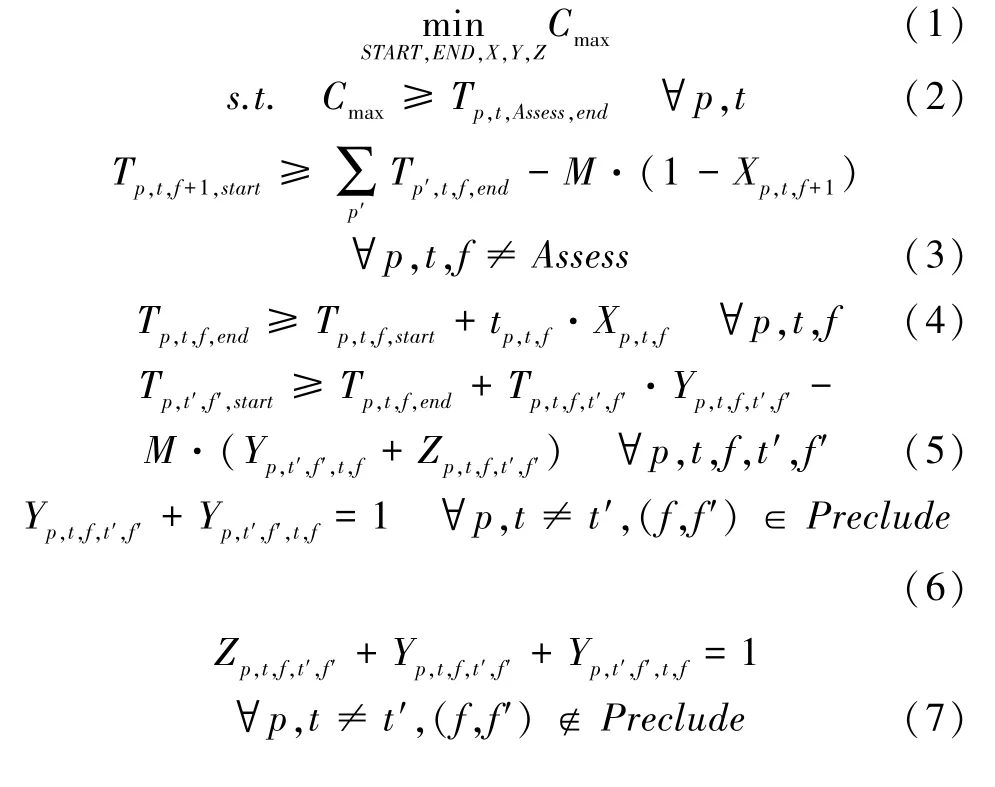
约束(5)要求一个平台只能执行针对目标的同一个阶段,不能同时执行不同目标的相互重复的阶段。
约束(6)要求各个作战阶段必须按顺序发生。
约束(7)规定了哪些作战阶段可以同时发生,哪些阶段必须按顺序发生。
约束(8)要求针对特定目标的特定阶段只有一个平台执行该阶段任务(没有重复)。
约束(9)要求平台不能对超出其能力范围的多个目标执行多重任务。
约束(10)要求平台发射的武器不能超过其可携带武器总数。
3 启发式快速任务规划模型实现
构建基于Excel的启发式任务规划评估工具插件,基于Excel中现有的VBA编程功能,将算法进行实现,主要包括3个核心功能点,即参数信息输入、算法逻辑实现、规划结果和作战进程实时展示(任务规划甘特图),完全采用Microsoft Excel界面输入和Microsoft Excel输出。针对每个作战目标分配作战任务,建立可行的火力打击进程甘特图,实现参数信息输入、火力打击网构建和规划结果的图形化呈现。
3.1 控制界面
在工具启动时,提供一个欢迎界面,供用户选择了解相关交战背景知识或模型工具的使用方法,或者用户可以选择进入控制界面,开始任务规划和作战运算。
如图1所示,进入控制界面后,用户可以通过选择设置平台类型、平台数量、平台位置、平台的武器配置及其他相关作战数据(如作战地域范围、目标数量、目标停留时间、天气状况等)来设置交战场景。

图1 启发式快速任务规划工具控制界面
3.2 启发式算法
启发式算法在某种意义上也称为贪婪算法,针对特定目标的特定打击阶段,算法都选择能力最接近的平台去执行相应任务。它按照时间顺序去处理每个目标的每个阶段,实时更新平台位置、武器状态和战场情景,并跟踪完成任务所需时间,避免任务冗余,最后形成一个作战进程调度时间安排表,并以甘特图的形式表示。
1)数据预处理
启发式任务规划工具首先对控制界面输入的数据进行可行性检查和数据校验,可行性预处理包括:
①武器平台数量是否能够满足作战需求(确保每个目标都有武器对其进行打击);
②确保如果选择了晴天以外的天气,那么,每个目标都有足够的GPS制导武器;
③确保在所有选定的平台中,有足够的传感器能够发现目标。
如果方案数据可行,启发式规划工具将数据加载到数据结构中,并开始计算、优化任务分配。
2)流程图
启发式任务规划工具运行采用时间片的形式,类似于离散事件模拟仿真[8]。从时间零点开始,算法根据最早到来的事件进行时间步进,即完成之前分配的任务或者按照强制时间步长0.1 min进行步进。随着时间步进,平台向目标移动或执行某一作战阶段,移动距离等于时间步长与移动速度乘积,并实时更新平台位置数据。通过这种方式算法实现任务循环跳转,如从(目标6,阶段3)到(目标4,阶段4)再到(目标10,阶段5),以此类推,直到完成所有作战任务。
联合打击网模型整体流程如图2所示,联合打击网各个任务阶段的动态规划部署流程如图3所示。

图2 火力打击网模型整体流程图
3)代码实现
模型中涉及的函数名称及其解释,如表2所示。
快速任务规划模型代码实现:



3.3 输出界面
输出界面明确了在攻击场景中最适合使用的平台和武器,并提供了每个杀伤链的时间推进表,以甘特图的形式详细说明每个作战目标不同作战阶段分配的作战平台和武器及完成攻击任务所需的最少总时间。
3.4 可行方案分析
可行方案是能够成功完成针对每个目标的各个作战任务阶段的攻击计划。通过开始运行前的数据预处理和校验,可以基本排除不可行的平台、武器和目标组合。但是,在处理一个交战场景时,如果算法运算花费的时间过长(例如超过100 min),或者方案虽然可行,但是执行完成所有任务阶段所需时间超出目标可能停留时间,该工具运算产生的方案同样不可行,因此,需要设置最大运行时间,一旦超出时间,即停止运行,并报告不可行。
4 测试案例
4.1 背景想定
1)敌方目标情况
假设经情报分析,在T岛沿岸分布有20个时敏移动战略导弹发射装置,射程在700 km,可携带核化学弹头,每个装置有20枚载弹量,具有强大威胁。导弹发射装置每天计划两波次发射:第一波次在06:00~10:00发射,第二波在18:00~22:00发射,导弹部队从随机的隐藏地点出发,在25 min内完成所有发射。发射地点相对于隐藏地点距离在4.3~43 n mile。假设导弹发射装置沿直线以平均34.6 km/h的速度机动。到达发射场后,弹道导弹发射发生在14~22 min和25~35 min的时间窗。发射后,在3~6 min内离开发射场前往下一个新的隐藏地点。
2)我方武器平台情况
为简化计算,假设我方有4种11类武器平台,现有武器为联合直接攻击弹药(JDAM)、联合对峙武器(JSOW)、先进反辐射导弹(AARGM)、战斧(TLAM)和新概念高速武器(HSW)等。平台和武器相关作战数据如表3所示,假设作战场景中天气晴朗。
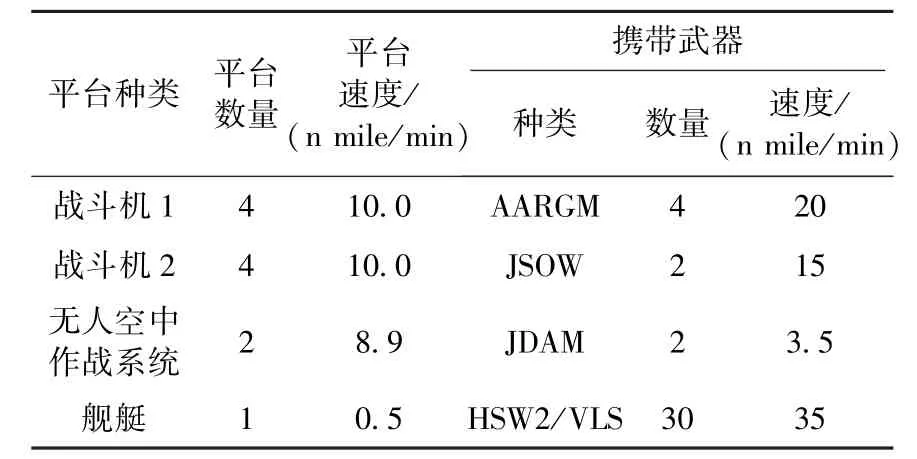
表3 我方武器平台作战数据表(一)
空中无人作战平台在前沿搜索目标,且与其他作战系统和指控平台有数据连接,发现目标后及时进行数据共享,任务中所有平台向目标机动,同时执行各个作战任务阶段,直到任务完成。
不同武器平台具有不同作战功能,表4为不同武器平台作战数据表。Cap表示平台可以同时探测的目标数量,Dur表示持续时间,是指平台执行功能所需的最短时间,Rmax表示传感器或武器的最大作用距离。平台4为水面舰艇,探测能力较弱,平台3位空中无人作战平台,探测能力较强,可以同时探测20个目标。假设“识别”和“批准”是瞬间发生的。

表4 我方武器平台作战数据表(二)
4.2 计算结果与分析
为对比打击效果,在相同背景想定条件下,分别计算联合打击和独立作战打击任务完成情况。
1)联合打击条件下
将武器平台数据和目标信息输入图1所示控制面板,运行启发式联合打击网任务规划工具插件,可得如图4所示联合打击作战进程任务分配甘特图及完成作战任务所需最短时间。
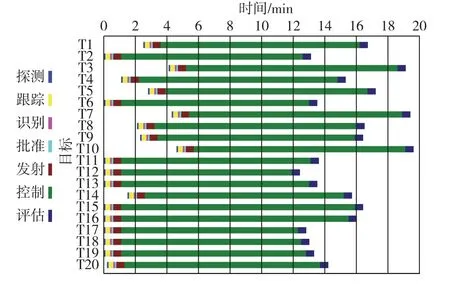
图4 联合打击网作战进程甘特图
图4所示为联合打击网作战进程甘特图。每条水平带表示指定目标的打击过程,不同打击过程用不同颜色表示,以分钟为单位表示。
图5所示为联合打击条件下完成任务所需最短时间及无法在规定时间内被打掉的目标数。
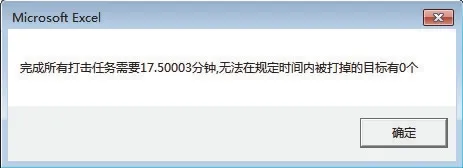
图5 联合打击条件下完成任务所需最短时间
表5所示为联合打击条件下完成作战任务的任务阶段分配表,表中数字对应目标序号。
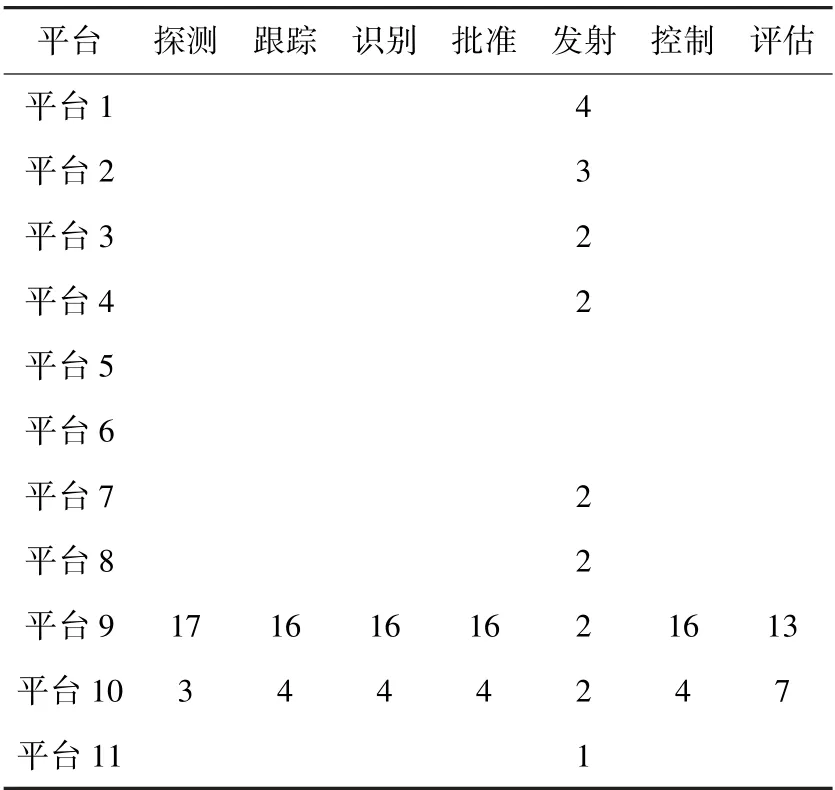
表5 联合打击网任务阶段分配表
2)独立作战条件下
独立作战条件下,即在不考虑信息共享条件下,针对某个打击目标,由某个平台独立完成探测、跟踪、识别、打击和毁伤评估等任务阶段,平台与平台之间没有协同配合。
通过计算可得,图6所示独立作战进程甘特图。
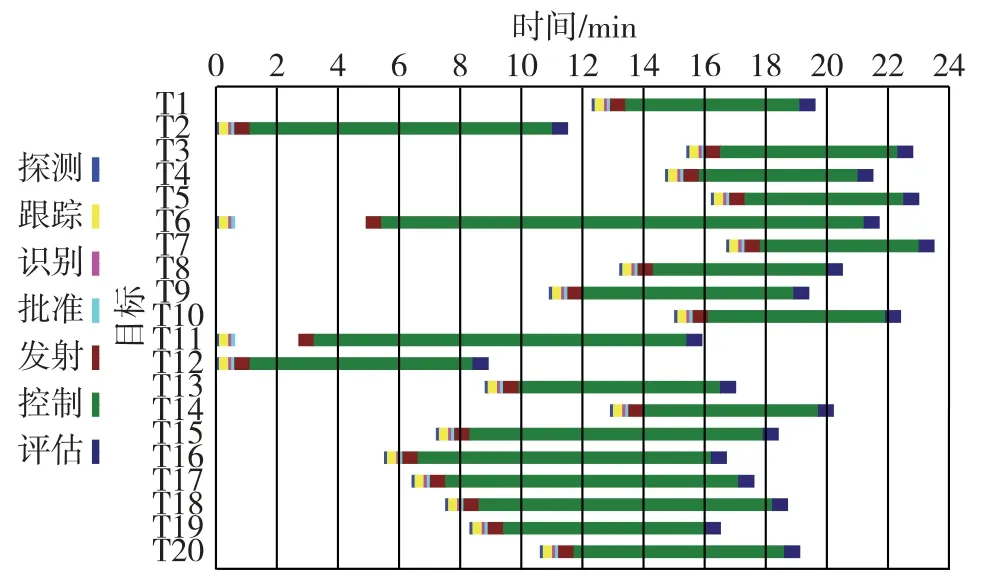
图6 独立作战进程甘特图
图7所示为独立作战条件下完成任务所需最短时间及无法在规定时间内被打掉的目标数。
图7 独立作战条件下完成任务所需最短时间
表6所示为独立作战条件下完成作战任务的任务阶段分配表,表中数字对应目标序号。

表6 联合打击网任务阶段分配表
3)结果分析
通过对比发现,联合打击条件下可更有效利用资源和武器平台,大大降低完成打击任务所需的时间,尤其对时敏目标的打击优势更为突出;而在无信息共享的各平台独立作战条件下,完成同样打击任务需要更多武器平台和时间。例如,本案例中,在相同想定和相同作战平台条件下,对20个时敏目标进行打击,基于信息共享的联合打击只需要9个武器平台17.5 min即可完成对时敏目标的打击任务,而后者即使在10个武器平台同时进攻条件下,仍然需要23.5 min才能完成对所有目标的打击,且有8个时敏目标(停留时间为20 min)在规定时间内无法被打掉,造成严重威胁。
5 结束语
随着作战装备和信息技术的快速发展,作战任务规划问题越来越受到关注。通过整合梳理作战打击任务阶段,提出了基于解析算法的作战部队打击网快速任务规划方法,并基于Excel软件开发实现了启发式作战任务快速规划工具插件。该工具实用性强、开发简单、成本极低、时效性高,可为指挥员作战决策、任务规划提供参考,具有非常高的实用价值和意义。且该工具插件可以应用于很多作战场景,如合成作战部队、防空作战单元、炮兵部队及战略打击部队等,具有广泛的军事应用价值。
限于时间、精力和篇幅原因,文中所述模型、方法还较为粗糙,在交战场景和作战想定的构建中,进行了一定的假设和忽略。但是简单实用的快速任务规划方法是提升当前部队战斗力的重要途径,基于解析算法的启发式快速任务规划方法将是重要发展方向,也需要更多专家学者集智攻关。本文希望抛砖引玉,为部队快速任务规划方法发展、研究,提供参考和研究方向。
猜你喜欢
科学文化(英文)(2022年1期)2022-04-27
科学与社会(2022年1期)2022-04-19
环球时报(2022-02-18)2022-02-18
老友(2021年12期)2021-01-10
莫愁(2019年36期)2019-11-13
环球时报(2019-08-30)2019-08-30
小哥白尼·军事科学画报(2017年3期)2017-06-12
中学生数理化·七年级数学人教版(2016年4期)2016-11-19
少儿科学周刊·儿童版(2016年2期)2016-03-19
儿童故事画报·发现号趣味百科(2015年10期)2016-01-20