
一种提升卡车操稳性能的控制策略研究
2021-08-28 09:49张旭,王印,卢威,武星
汽车实用技术 2021年15期
张 旭,王 印,卢 威,武 星
(陕西汽车集团股份有限公司,陕西 西安 710020)
1 背景和研究意义
当今社会交通事故频发,车辆安全控制一直是研究的热点。近年来,为提高汽车的操控性同时确保车辆安全行驶,汽车横摆动态控制已成为汽车研究的重点。有效的横摆力矩控制是提高安全性的重要途径,不仅可满足车辆的性能,同时能提高驾驶员的驾乘舒适性。为此,相当多的学者基于各种控制技术提出了不同的控制方法,如PID 控制、模糊逻辑控制[1]、滑膜控制[2]、以及其他控制等。这样的策略可以在车辆处于转向状态时,大大提高车辆操纵性和主动安全性驾驶性,保持车辆轮胎与路面之间的附着极限,使轮胎始终保持与地面的接触。在车辆动力学系统中,横摆力矩控制的主要目标可以划分为两个方面。第一方面是控制侧偏角足够小,第二方面是保持跟踪实际的横摆角速度,使与真实值的横摆角速度的误差趋近于零。本文研究的问题是基于EPS 卡车车型的转向状态时,横向动力学系统的跟踪控制问题,提出了一种PID 控制器旨在改善车辆的操纵性和安全性。同时本文引入侧偏角的理想曲线——“零”曲线,作为跟踪目标。最后,以车辆二自由度系统模型为设计实例以说明所提议的控制的有效性。
2 二自由度卡车侧偏动力学建模与分析
2.1 卡车的二自由度自行车模型描述
该模型包括侧偏平移运动和横摆运动。Fyf和Fyr分别表示前后轮侧偏力;β表示车体侧偏角;δf和δr分别表示前后轮转向角;lf和lr分别表示质心到前后轮的距离。考虑利用两个坐标系描述车辆的横摆运动。一个坐标系固定在惯性空间(x0,y0),另一个坐标系固定在车身(x,y)。x轴和x0轴之间的夹角为横摆角φ。横摆率(横摆角速度)r=作为动力学方程的状态变量,αf,αr分别是前后轮侧偏角。θvf,θvr分别是车辆速度矢量和车辆纵轴之间的夹角;Cf,Cr为侧偏刚度。m是车辆的质量,V是车辆的速度,Iz是车辆横摆转动惯量[3-5],MZ为主动控制力矩。模型如图1 所示:
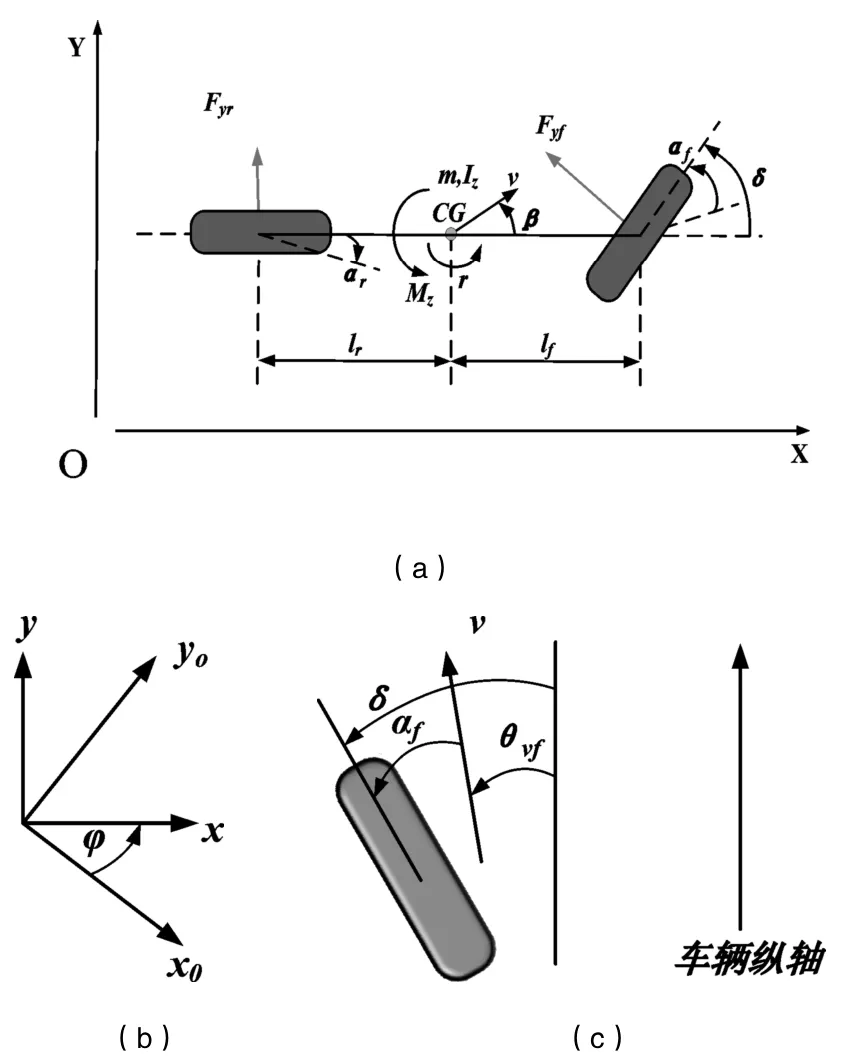
图1 二自由度自行车模型
车辆侧偏平移动力学方程和横摆动力学方程为:

轮胎侧偏角是指轮胎平面与速度矢量之间的夹角。
利用小角度近似法有:

在侧偏角很小的情况下,非线性轮胎侧偏力可近似如下:

将(2)、(3)式分别代入(1)式得到:

接着,为获得系统的空间状态方程,根据式(1),选择系统的状态变量
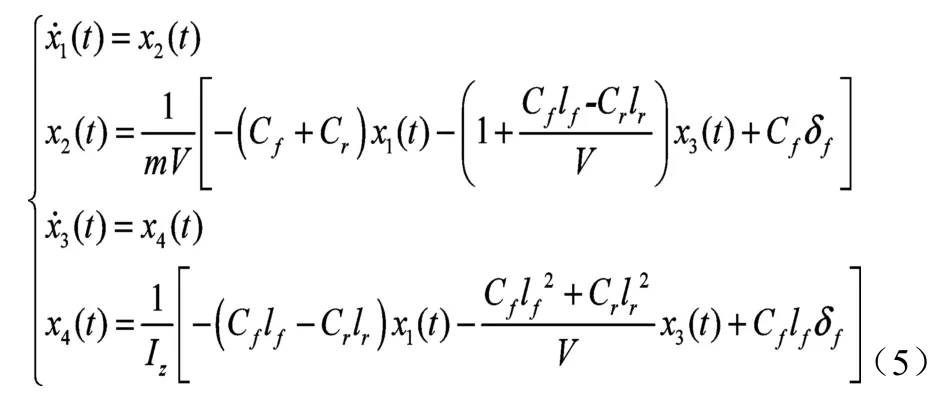
2.2 稳态分析
为了清晰地了解横摆角、侧倾角与转向角之间的关系,本文对二自由度模型进行稳态转向运动分析。系统稳定的条件将其代入式(4)中,可得:
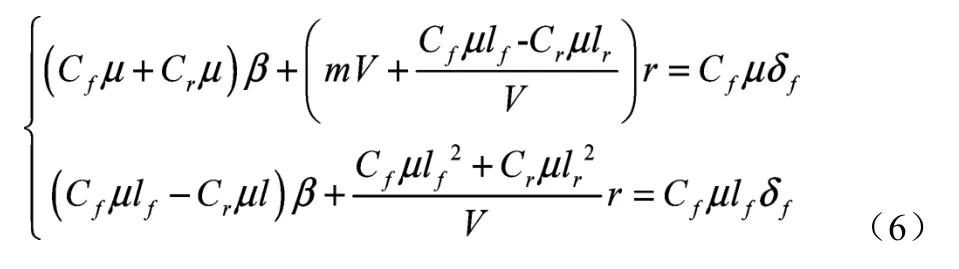
令δr=0,l=lf+lr对β和r求解,可得:

假设车辆以几乎V≈0 的低速作稳态转向运动,则式(7)(8)中的V2可忽略不计,那么:

3 PID 控制器设计
PID 控制,又称PID 调节。它以其结构简单、稳定性好、工作可靠、调整方便而成为工业控制的主要技术之一。当被控对象的结构和参数不能完全掌握,或得不到精确的数学模型时,控制理论的其它技术难以采用时,系统控制器的结构和参数必须依靠经验和现场调试来确定,这时应用PID 控制技术最为方便。即当我们不完全了解一个系统和被控对象,或不能通过有效的测量手段来获得系统参数时,最适合用PID 控制技术。本文采用PID 技术对整车二自由度模型进行设计,具体PID 设计框图如下所示:

图2 PID 控制框图
3.1 被控模型
基于被动系统模型式(5),建立主动系统模型,主动系统的动力学方程为:
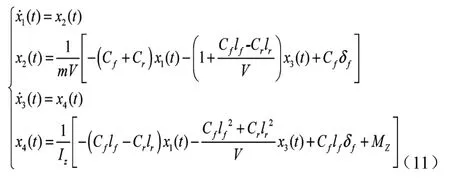
其中,MZ为主动控制输入。
3.2 控制器设计
3.2.1 控制原理
PID 控制器根据系统的误差,利用误差的比例、积分、微分三个环节的不同组合计算出控制量。PID 的控制[6]算法如下:

其中:KP,Ti,Td分别为比例、积分、微分控制系数;e(t)为系统控制误差变量,主动系统PID 控制器的设计是以EPS 卡车转弯时稳定的转向角度作为被控系统模型的输入,横摆角度为控制目标,本文选择EPS 卡车在转向时横摆角度的控制期望值为βd=0,以横摆角度的期望值与实际测量值为控制器的输入e(t)=βd-β,控制器的输出为主动控制扭矩。
3.2.2 参数整定
PID 控制器参数整定方法,以人工整定的方法、频率响应法、解析法为主,本文采用人工是凑法逐步整定KP,Ti,Td三个控制系数。首先整定参数KP,把Ti,Td参数设置为0并保持不变,从小到大逐步调整KP,直到使得控制系统反应快且超调量小的曲线;接着,进行积分部分调节,整定参数Ti,给定较小的Ti的值,把KP的值略微减小,然后从小到大逐步调节Ti的值,在保持良好动态特性的情况下将静态误差调节至为0 状态,在全部调整过程中根据响应曲线反复修改KP(微调)、Ti,以保证控制系统的性能。最后,进行微分部分Td的调节,方法与参数Ti的求解方法相同。经过多次调节整定后得到最佳的控制参数为:KP=2000,Ti=50,Td=340。
4 对比仿真分析
为验证控制器的控制效果,本节分别以正弦函数和阶跃输入作为控制的输入,与被动系统的仿真结果进行仿真验证。仿真所用的EPS 卡车的主要参数见表1。
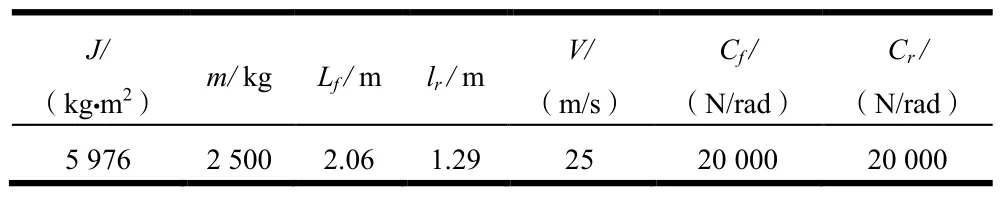
表1 卡车参数
选取δf作为控制输入,后轮转向角δr=0。在2≤t≤8 时,输入且在20 ≤t≤40 时,δf=-0.09×sin的正弦波信号与MATLAB 软件中自带的阶跃输入信号,如图3 所示。

图3 不同前轮转向角输入
在Simulink 环境下建立如图4 所示的仿真框图:
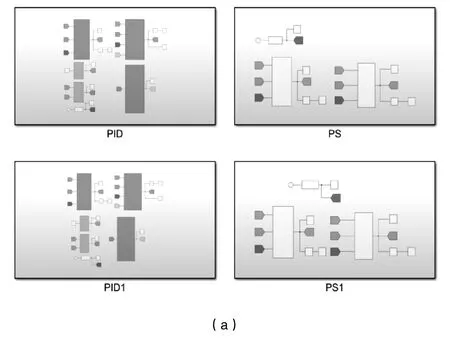
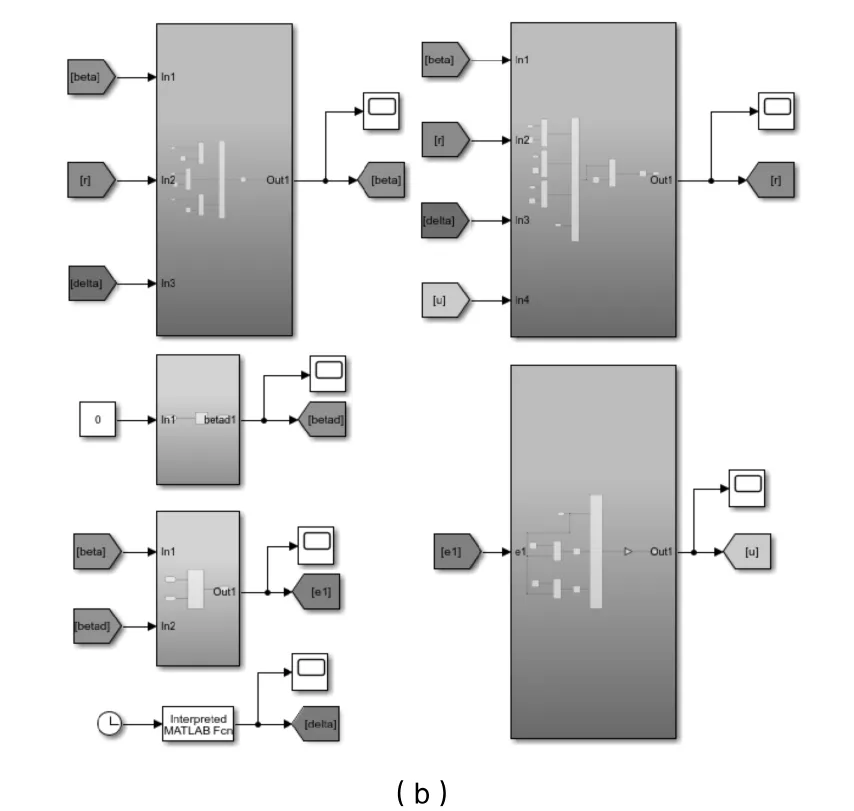
图4 控制系统Simulink 模型
图5 给出了控制系统与被动模型的比较,在前轮转角为正弦信号输入条件下EPS 卡车横摆角和侧偏角加速度的对比曲线;图6 给出了阶跃信号输入条件下EPS 卡车车辆横摆角和横摆角速度的对比曲线;图7 显示了不同模式下车辆的侧偏角误差时域响应对比曲线。

图5 前轮转向角正弦信号输入对比曲线
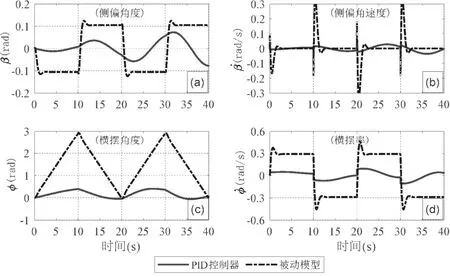
图6 前轮转向角阶跃信号输入对比曲线
从图5(a)和(c)分析可得,通过与被动模型对比,PID 控制器可以很好地抑制正弦转角输入对系统带来的影响;从图5(b)和(d)可以看出;PID 控制器能明显改善横摆率与侧偏角速度,并且会使系统达到稳态。从图6(a)和(c)可以看出,相较于被动模型,基于PID 的控制器能够很好地适应阶跃信号转角输入;同时,从图6(b)和(d)分析可得,PID 控制器能明显改善EPS 卡车的横摆率和侧偏角速度,PID 控制器控制使系统的速度峰值更小。
通过图7(a)~(b)可以得出,无论在哪种转角输入情况下EPS 卡车的侧偏角误差均很小,说明PID 控制的侧偏角度可以良好的跟踪理想的参考侧偏角度,进而表明本文提出的PID 控制器对被控系统有很好的控制效果。
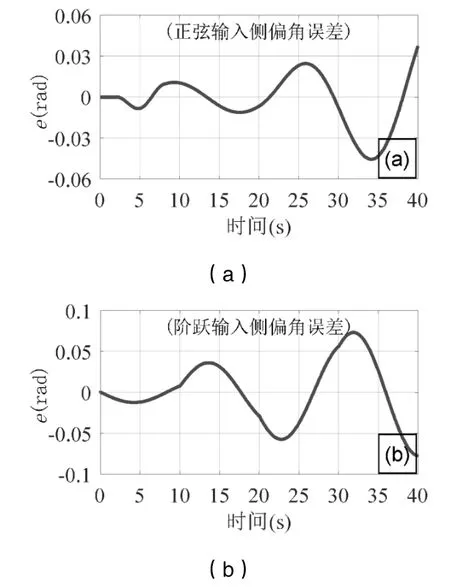
图7 不同输入误差曲线
5 结论
本文提出了一种PID 控制策略,在EPS 卡车转弯时,可实现对车辆横摆和侧偏运动的改进。同时,本文选取了理想的侧偏角度作为参考曲线,通过控制器使得实际的侧偏角度可良好地跟踪理想的参考曲线;为验证控制器的效果,本文选取了不同的转角输入;最终,通过仿真实例,验证了本文提出的控制策略可有效保证车辆侧偏和横摆稳定性能,进而,确保了卡车行驶的安全性。
猜你喜欢
汽车实用技术(2022年14期)2022-07-30
汽车与驾驶维修(维修版)(2021年10期)2021-11-05
汽车与驾驶维修(维修版)(2021年10期)2021-11-05
新课程·中学(2019年7期)2019-09-17
中学课程辅导·教师通讯(2018年10期)2018-09-04
物理教学探讨(2018年1期)2018-02-13
中学生数理化·高一版(2017年3期)2017-07-08
儿童故事画报(2017年4期)2017-05-26
中学生数理化·高考版(2008年2期)2008-11-01
