
汽车电动助力转向系统助力特性分析及仿真研究
2021-08-28 09:49于发加
汽车实用技术 2021年15期
于发加
(青岛港湾职业技术学院,山东 青岛 266404)
前言
汽车在低速时驾驶汽车进行转向时,对外输出功率较大,这样一来驾驶者就不能长时间驾驶。而汽车作为一个代步工具,自然是越省力越好,为了解决此类问题,助力转向系统应运而生。传统的转向系统无法使转向轻便性和路感都处在一个足够好的状态,而EPS 可以做到这一点。EPS 由电动机为其提供助力,比之前的转向系统的操作更为简单,对电动机的电流进行一定控制,就能传递助力通过改变助力电流来满足不同车型的需要。
1 模糊控制概述
模糊控制是基于专家知识或操作经验,采用语言规则表示的一种人工智能控制策略。模糊控制可以按照经验或者试验数据制定控制规则来控制受控对象[1]。
模糊逻辑的基础是“经验值”,相对于其他控制方法,模糊控制方法比较成熟可以充分利用专家知识,且此技术与汽车电子控制技术融合度较高,不需要改变汽车电子控制技术的程序代码,而只需要在此基础上进行程序的设计和匹配即可。
2 模糊控制器的设计
设计的模糊控制器分别有两个输入端以及一个输出端。输入为转向盘转矩Ts以及车速V,输出则是目标电流Icmd。
图1 为模糊控制器原理图,在模糊控制器中输入两个参数分别是车速和转矩,通过运算最终得到目标电流。
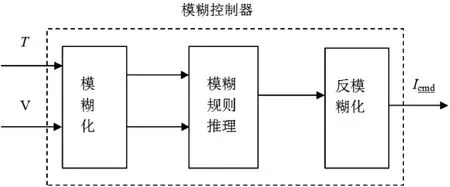
图1 模糊控制器原理图
通常的模糊控制由模糊化接口、知识库、推理机制和模糊判决(即反模糊化)等部分组成。
在进行模糊控制过程中,首先建立推理规则库,主要有推理管理体系和推理经验值两部分组成即经验集合加规则集合,这两部分并不是直接输入到相应的单片机中,而是需要进行一定的处理和运算形成模糊控制的数据库与规则库,并以数列的形式供ECU 查询和使用。其次是输入参数即方向盘的转矩Ts和车速V。然后根据输入的参数值与ECU 中的数据库进行对比分析,将精确的输入值转化成模糊的控制策略[2]。最后输出控制电动助力电机精确的目标电流。
2.1 MATALB-FuzzyLogic 模块介绍
FuzzyLogic 是MATALB 仿真软件在中的一个模块,它主要的功能是进行控制策略的仿真模拟,主要是模糊控制这一部分。首先在FuzzyLogic 中定义仿真需要的输入/输出量,然后输入需要的输入量值,调取或者建立相关的控制规则,然后进行仿真分析得到精确的输出量和相关曲线[3]。仿真过程中通过改变输入量的值进行曲线和输出量值得变化分析,已得到需要的结果。电动助力转向系统控制策略的研究主要涉及到两个变量,分别是转向盘力矩输入和车速输入,对以上两个变量分析仿真可以得到助力电机的助力电流。
2.2 各参量的定义及模糊化
模糊控制器的参量主要包括转向盘输入转矩Ts与车速V,以及目标电流Icmd。其中转矩Ts与车速V是输入量,目标电流Icmd是输出量。
(1)转矩Ts:设定转向盘输入力矩,对于微型汽车,参照对应资料,取Td0=1 Nm。为了降低驾驶者的疲劳程度,参照对应资料,初步取Tdmax=10 Nm。在此条件下,助力电机在汽车整个行驶状态下为其提供助力转矩。根据上述对转矩的取值,转矩Ts的模糊论域为[1,10],单位为N·m。
(2)车速V:按照我国正常车速0~120 km/h 的要求,设置其模糊论域为[0,120],单位是km/h,设计其语言值为{ZERO(零),VSLOW(很慢),SLOW(慢),MEDIUM(中等),FAST(快),QFAST(相当快),VFAST(很快)。
(3)目标电流Icmd:汽车转向电动助力系统所使用的助力电机一般的额定电流是小于等30 A,所以设置其模糊论域为[0,28],单位是A,设计其语言值为{ZERO(零),VSMALL(很小),SMALL(小),MEDIUM(中等),BIG(大),QBIG(相当大),VBIG(很大)。
模糊化控制其输入是一系列的精确值,而经过计算后输出的是模糊值,模糊化的作用是确定隶属度函数,即输入变量和输出变量的隶属度关系,通过输入变量的语言输入后,经过函数运算得到模糊的输出变量[4]。具体来说就是在隶属度函数图中已知输入变量X 值,求出输出变量Y 值。
2.3 建立模糊推理规则
模糊控制规则是模糊推理的依据。因为EPS 对助力特性曲线有很多要求加上驾驶者在行驶过程中的一些操作经验,得到7*7=49 条控制规则。这些规则对于双输入(转向盘输入转矩Ts与车速V)单输出(助力电流Icmd)的模糊控制器[5],主要用到如下形式:

对以上程序语言进行分析,如果方向盘的力矩输入很大,车速输入值也很快,则对助力电机输出的目标电流就很小。根据以上程序片段的编写逻辑对其他情况依次进行程序的编写,最终形成一个完整的程序输入到控制器,当输入力矩与车速发生变化时,输出的目标电流也会根据确定的规则进行变化,从而确定精确的目标电流值[6]。
3 助力特性图及仿真分析
将编写完成的仿真程序及不同的力矩Ts、车速V输入到MATALB-FuzzyLogic 模块中进行仿真分析,如图2 所示。
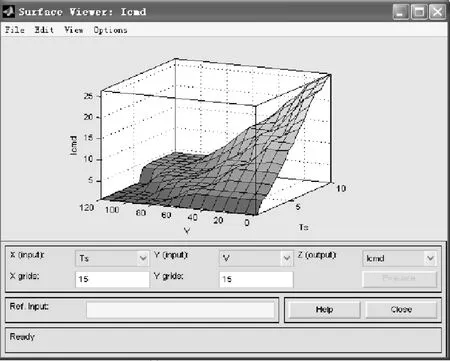
图2 EPS 系统助力特性图
经过仿真分析得到电动助力转向系统的助力曲线,下面来分析转矩Ts、车速V对助力电流的Icmd影响。分两种情况,其一是输入的车速V不变的情况下,力矩Ts对电机目标电流Icmd的影响变化;一种是力矩Ts不变的情况下,车速V电机目标电流Icmd的影响变化。
首先分析输入的力矩Ts不变的情况下,车速V对电机目标电流Icmd的影响变化,如图3 所示。

图3 不同V 下的Ts与Icmd的关系曲线图
然后分析输入的车速V不变的情况下,力矩Ts对电机目标电流Icmd的影响变化,如图4 所示。

图4 固定Ts下的Icmd与V 对应关系曲线图
由图3 和图4 得知,目标电流Icmd与转矩Ts和车速V的对应关系曲线有以下特点:
(1)当车速V固定不变时,目标电流Icmd变大时输入转矩Ts也同时变大。
(2)进行低速运行时,为了保证低速行驶时的转向轻便,所以要给其一个很大的助力电流Icmd。当车速不断地增加,助力电流Icmd就会慢慢减小,助力也会慢慢减小。
(3)当方向盘输入力矩较小时如图4(a)、4(b)所示,车速越低输出的助力电流越大,方向盘操纵轻便,车速越高输出的助力电流越小,使车辆保持较好的路感。
(4)当方向盘输入力矩较大时如图4(c)、4(d)所示,车速越低输出的助力电流越大,方向盘操纵轻便,车速越高输出的助力电流越小,使车辆保持较好的路感;总的来说转向盘输入力矩较大而车速较低,助力电流大,转向盘输入力矩较小而车速较高,助力电流小。
(5)当输入转矩Ts不断增加时,提供助力电流Icmd也会不断增加,使助力转向效果达到最好。
通过对以上参数进行仿真和分析得出,通过模糊控制器进行助力转向控制得到的助力转向特性曲线与汽车助力转向本身的特性曲线基本一致,所以模糊控制方法对于助力控制是合理的。而且模糊控制策略下的助力控制策略可以得到助力电机的目标电流值,在此基础上,随着汽车行驶,车速和转向盘输入力矩的大小输入到ECU 中进行助力模糊控制,控制过程中只需要改变转向盘输入力矩、车速和助力电流的数值,既可以得到每时每刻与EPS 相匹配的助力特性。
4 结论
电动助力转向系统可以有效改善车辆转向操纵稳定性,越来越多的车辆开始使用电动助力转向系统EPS。本文对EPS 助力特性进行分析,并采用模糊控制对分析的结果利用模糊控制器,在Fuzzy Logic 软件上仿真,得到了车速V、方向盘输入转矩Ts与目标电流Icmd三者的关系曲线,通过曲线可以得出模糊控制的控制策略可以满足EPS在实际应用中在转向方面中对转向助力的需求。
猜你喜欢
汽车实用技术(2022年15期)2022-08-19
舰船科学技术(2022年10期)2022-06-17
防爆电机(2022年3期)2022-06-17
防爆电机(2022年2期)2022-04-26
汽车实用技术(2022年3期)2022-02-23
航天器环境工程(2021年6期)2022-01-07
新视线·建筑与电力(2021年2期)2021-09-10
电机与控制学报(2018年9期)2018-05-14
神州·中旬刊(2017年1期)2017-06-28
山东青年(2016年12期)2017-03-02
