CJ1飞行训练设备操纵系统故障浅析
2021-08-31 02:14李会茹
航空维修与工程 2021年4期
摘要:操纵系统是飞行模拟训练设备的重要组成部分,本文介绍了CJ1飞行模拟训练器操纵系统的组成、工作原理和控制法则,最后以CJ1飞行模拟训练器的左侧方向舵卡阻故障为例,介绍了典型的操纵故障的排除方法,故障排除后进行方向舵的QTG测试。测试结果表明,左侧方向舵故障得到了解决,满足飞行要求。
关键词:飞行模拟训练器;操纵系统;方向舵卡阻;QTG测试
Keywords:flight simulation;control loading system;rudder jamming;QTG test
0 引言
飞行训练设备一般由模拟舱、运动系统、视景系统、计算机系统、操纵系统及教员控制台六大系统组成。其中操纵系统是安装在驾驶舱中,通过连杆等与飞机的执行机构(驾驶盘、驾驶杆、脚蹬等)连接,用来模拟飞行杆力、脚蹬力等的驾驶舱力操作与反馈的系统。先进的操纵系统能够使飞行员感知到与真实驾驶舱一样大小的力反馈,因此可仿真飞机在不同飞行状态下的力、阻尼特性等[1-3]。
飞行训练设备上将飞机操纵系统分为主操纵系统和辅助操纵系统[4]。主操纵一般为主要的控制,辅助操纵一般为较次要的控制。根据模拟机机型的不同,主操纵系统和辅助操纵系统的分类也不同。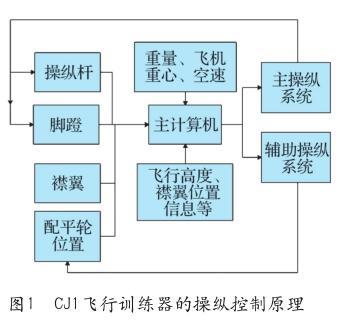
1 操纵系统的组成
在CJ1飞行训练器上,飞行员通过操纵训练设备的脚蹬、操纵杆、襟翼和配平轮位置,产生作用力或者位置信息。模拟设备将这种作用信息作为输入信号,输入到主计算机(SimHost),主计算机再将采集的信号与飞机当前的重量、飞机重心、空速、飞行高度、襟翼位置信息等进行综合处理分析,计算出输出信号,传输给主操纵计算机和辅助操纵计算机,主操纵计算机和辅助操纵计算机输出驱动信号,驱动相应的控制设备作动,以反馈与真实飞机同样大的力到脚蹬、操纵杆和模拟的飞机舵面,实现对模拟设备的操纵控制。主操纵系统控制俯仰、横滚和偏航的操作。辅助操纵系统控制俯仰配平轮和襟翼位置指示。在所有模拟环境和模拟时机下,操纵系统必须响应飞行员的操作命令,激活相应的操作执行机构,操纵系统的控制原理见图1。
1.1 主操纵系统
CJ1飞行训练设备的主操纵系统,由主操纵控制计算机、3个伺服驱动组件(伺服放大器)、3个操纵控制组件电机及其位置、力传感器和相应的铰链杆组成。主操纵计算机采用Linux操作系统,安装有SATA接口的4G内存的SM卡。主操纵计算机有两个网口,一个网口LAN与主计算机(SimHost)相连,另一网口与交换机相连后,分出三个网线接口,分别连接3个伺服驱动组件,每个伺服驱动组件与操纵控制组件相连,操纵控制组件与其下一级的铰链杆连接。由于操纵系统要实现操纵的精确控制,操纵控制组件CLU将作用力的值和其控制的舵面的位置信息反馈给伺服驱动组件,以更好实现伺服驱动组件对操纵控制组件CLU的控制。具体实现原理见图2。
1.2 辅助操纵系统
CJ1飞行训练设备的辅助操纵系统,是飞行员操作的机械控制装置,由辅助操纵控制器、伺服驱动组件和控制设备组成,如图3所示。飞行员的操作信号为输入信号,首先传递给控制计算机,辅助操纵控制器为一台单板机,其接收来自主计算机(HOST)的SimLAN信号、驱动两个伺服驱动组件,实现对俯仰配平轮和襟翼指示器的控制。见图3。
2 主操纵系统的控制法则
主操纵系统包含两条控制法则:内环法则(控制系统的执行机构)和外环法则(模拟机的飞行控制系统)。在正常的系统操作中,一般不会進入内环的控制法则和参数设置。在模型启动时,内环的控制便被加载。内环的控制数据存储在操纵计算机的硬盘里,除非机械方面的改变才需要进行内环数据的修改。但遇到操纵数据丢失时,可以在操纵系统的控制软件(MoogExplorer)中进行数据参数的修改。外环控制主要是外部机械操纵的力与信号的控制,这里重点介绍内环控制的工作原理。
内环控制中的重点是执行机构,执行机构的主要作用是通过记录飞行员施加到控制系统上的力的大小和位置,在飞行控制操作时产生一个连续的实时稳定的作用力。为了实现这一精准控制,在计算机软件里将每一个执行机构分成一个单独的控制通道。每个控制通道由相应的执行机构控制,并单独工作。在控制软件里面可以监控主操纵系统三个通道的参数值,并根据实际情况进行参数值的修改。一般可以修改的参数值为伺服放大器的参数值(根据电机/马达参数值修订)、力传感器放大器值(增益、偏移、行程)、位置传感器放大器值(增益、偏移、行程)、速度传感器放大器值(增益、偏移、行程)。
执行机构的控制参数集成在操纵计算机软件内,是一种PID控制器,其分为比例控制通道、积分通道和微分通道三个通道进行偏差调节[6],其中比例控制通道是主控制通道,其输出与输入误差成比例关系,用于减少错误的反馈值。积分通道与比例通道一起工作,用于消除静态误差。微分控制通道产生相位前置,增加频率响应。
3 操纵系统的故障排除实例
操纵系统一旦发生故障,将会中断训练。同时模拟设备的操纵系统故障也是维护工作中的重点和难点。随着飞行训练设备的老化,故障发生概率明显提高。下面以一起操纵故障为例进行故障排除的阐述。
故障现象:CJ1飞行训练设备左侧方向舵不工作,脚蹬没有反应。
排故流程:
1)CJ1飞行训练设备左侧方向舵属于主操纵系统,首先查看操纵控制软件,没有发现故障信息提示,见图4。
2)检查与左侧方向舵相连接的执行机构有无连接松动或断开的情况。由于飞行训练设备长期带运动飞行,其六自由度的运动强度大,持续时间长,难免会引起连接线路(机构)的松动或者断开。对照维护手册,找到左侧方向舵的控制机构,通过目视检查机械连接,并紧固。
3)通过万用表检查连接电路。

4)检查确保机械和电路连接正常后,故障依旧存在。
5)打开控制软件,一边操纵左右两侧方向舵,一边查看左右侧方向舵的实时数据值。发现在操作左侧方向舵时,其MeasutedForce的输出值在2~5之间,而操作右侧方向舵时,其右侧方向舵MeasutedForce值为-51左右。根据以往的维修经验,怀疑是伺服放大器或者是电机故障。
6)对伺服放大器和电机进行更换后故障依旧。
7)连接维护笔记本电脑到座舱,左右脚踩下方向舵,左侧方向舵变化幅度小,右侧方向舵变化幅度正常。分析操纵系统的控制法则,怀疑是内环的控制数据值丢失,尝试对内环控制数据值进行更改。
8)在FCS软件中修改MeasureForce的GAIN增益值,本身为1,现逐渐调整增加到38。在调试值得过程中,一边修改增益值的大小,一边操作脚蹬操作检查力的反馈。直至测试正常,其修改工作页面见图5。
9)在教员操纵台上,进行方向舵QTG测试项目,其测试的目的是自动检测在方向舵上施加不同的力,其产生的位置变化量是否与主QTG测试包线基本一致,只有测试值与主QTG包线基本一致,才能保证CJ1飞行训练设备的正常适航运行,如图6所示。
方向舵故障停机维修中,其开始遵循了传统的排故方式,通过检查控制软件没有故障提示,然后对机械结构、电路连接进行查看,确保机械和电路连接正常后,怀疑是电机或者是伺服放大器故障,对电机和伺服放大器进行更换,故障依旧。通过仔细观察研究,分析其工作原理,发现伺服放大器力传感器存储放大倍数丢失,通过在FCS-EXPLORER中重新设置放大系数,排除了故障,使飞行训练快速恢复。
4 总结
操纵系统维护是模拟设备维护工作中的重要内容,保证操纵系统的工作正常是保证飞行训练的关键。本文所举排故案例中,通过对内环控制数据值重新设定完成了此次故障的排除,积累了十分宝贵的维修经验。此内环控制数据丢失故障发生概率低,需要有一定维护经验才能迅速判断。因此。此排故经验可为以后的故障排除提供指导性的意见,提高维护效率,减少系统宕机时间。
参考文献
[1] 肖志坚. CJ1飞行模拟器运动系统与故障分析指针式仪表研制[J]. 机电技术,2013(10):8-10.
[2] 陈又军,苏斌. 民用飞行模拟技术与应用[M].成都:西南交通大学出版社. 2020.
[3] 陳又军. 现代飞行模拟机技术发展概述[J].中国民航飞行学院学报,2011,22(2):25-27.
[4] Maintenance manual CJ1 FFT for CAFUC [Z]. Mechtronix. 2013.
[5] Maintenance manual Control Loading. 2013.
[6] PID control system analysis,design,and technology [J]. IEEE Trans Control Systems Technology. University of Glasgow CAutoD. 2005.
作者简介
李会茹,工程师,研究方向:模拟机维护与仿真。