轴承环抓取机器人的运动与受力分析*
2021-09-03 04:40田国富林梓正沈阳工业大学机械工程学院辽宁沈阳110870
现代机械 2021年4期
田国富,林梓正(沈阳工业大学机械工程学院,辽宁 沈阳 110870)
自21世纪以来,工业机器人的使用在提高生产效率的同时[1-2],解放了劳动力。本文以现有的物料搬运机器人为基础,分析其运动和受力,为后期的机构优化提供了依据。
1 轴承环抓取机器人
轴承环的加工生产过程分为七个步骤:下料、热处理、镦粗、冲孔、整形、热扩孔、终锻成型[3]。以往轴承环会在1000 ℃的高温下被人工搬运[4],而轴承环抓取机器人可以代替工人将轴承环在各个工位间进行搬运,确保了工人人身安全。
1.1 轴承环抓取机器人的动作设计
本次所模拟的工况是将此机器人作为扩孔机上料机械手将冲孔后的预辗扩毛胚原料,夹取至整形工位进行辗扩。
1.2 方案设计
本文采用的是本工作室的专利轴承环夹取机器人(图1),在电机方面选用了韩国LS的APM-SE22D伺服电机,此电机在狭小空间中进行装配较为有优势,减速器方面选用台湾APEX的AB090M1与AB115-30减速器,此轴承环夹取机器人具有4自由度,其中包括三个转动副,一个平移副,能够快速稳定的进行夹取作业。

图1 机器人结构图
2 机器人数学模型的建立
根据实际应用的需求,建立数学模型从而求出正逆运动学的解。本文采用D-H法进行模型建立,D-H法是建立每个连杆的独立坐标系[5],虽然D-H法较为繁琐,但是其模型建立精度更高,过程易于理解[6]。
2.1 机器人的正运动学
对于现有机器人进行数学模型的建立(表1)。

表1 通过D-H法对于机械人的建立
由坐标之间的映射关系,可得相邻坐标系之间的位置关系,结构简图如下(图2),正运动学如式(1)。

图2 机器人结构简化图
(1)
经过计算得:
nx=C1C2C3C4-S1S2C3C4-C1S2S3C4-S1S2S3C4+S1S2S3S4-C1C2S3S4-C1S2C3S4-S1C2C3S4
ny=S1C2C3C4+C1S2C3C4-S1S2S3S4+C1C2S3C4-S1C2S3S4-C1S2S3S4-S1S2C3S4+C1C2C3S4
nz=0
ox=S1S2C3S4+C1S2S3S4+S1S2S3S4-C1C2C3S4+S1S2S3C4-C1C2S3S4-C1S2C3C4-S1C2C3C4
oy=S1S2S3S4-S1C2C3S4-C1S2C3S4-C1C2S3S4-S1C2S3C4-C1S2S3C4-S1S2C3C4+C1C2C3C4
oz=0ax=0ay=0az=1
px=a4C1C2C3-a4S1S2C3-a4C1S2S3-a4S1S2S3+a3(C1C2-S1S2)
py=a4S1C2C3+a4C1S2C3-a4S1S2S3+a4C1C2S3+a3(S1C2+C1S2)
pz=d1+d3
以上为机器人的正运动学。
2.2 机器人的逆运动学
机器人的逆运动学与正运动学正好相反[7],逆运动学是在已知机器人末端位置坐标的情况下逆向推导出θ1、θ2、θ3、θ4的角度[8],而根据实际情况,去掉不能实现的解。
现求解逆运动学解的主流方法有两种,分别是封闭解法和数值解法[9]。其中数值解法一般由于其计算量大,无法实时控制,一般用于冗余机器人的计算上,其没有封闭解,而封闭解法分为代数法和几何法[10],本文采用其中paul代数法进行求解。
(2)
3 机器人的运动以及动力分析
将已经建立好的模型导入到ADAMS中,分析物料搬运机器人的运动学以受力情况。
3.1 机器人的运动学分析
在对机器人进行分析时运动分析是前提[11],经过对于卡钳的确定,找到其相对应的卡钳可以进行抓取的轴承环为UCP306带座轴承,质量为1.8 kg,将其简化模型带入到ADAMS中进行模拟。
首先设置机器人的材料为steel,将机械臂由初始状态,通过点驱动,到达最终机器人立柱绕基座逆时针旋转180°,大臂下降520 mm(图3),假设原机械手末端坐标为(0,0,0),则完成后的点坐标为(-3240,0,-520)。

图3 机械臂空间位置
经过设计,将机器人的末端执行机构的运动情况分为加速、匀速、减速三个阶段,针对本次工况,将机器人分为基座、立柱、大臂、小臂、机械手五大部分,并在连接处添加关节。通过查阅相关资料,确定末端的最大速度为1300 mm/s[12]。在机械手的末端添加末端测量,进行运动学的研究。其速度曲线图如图4所示。

图4 速度曲线
3.2 机器人的动力学分析
将模型进行简化,将使用的APM-SE22D电机,以及AB090M1与AB115-30减速器分别以载荷的形式简化到机器人上。在实际生产过程中,机器人的大臂所受的载荷最大,小臂与其受力状态相似,所以此次动力学分析主要对于大臂进行。

图5 机器人相关约束
使用上一部分所确定的速度曲线,将基座固定,在基座与立柱之间,大臂与小臂之间,小臂与抓手之间添加转副,在立柱与大臂之间添加移动副完成后添加载荷(图5),将仿真时间设定为5秒,将步数设置为500步进行仿真,在大臂与小臂连接的转动副处进行测量,获得大臂在运动中所受到力与力矩,为方便下一步的应力分析,将x,y,z三个方向的分力分别进行测量生成函数(图6)。

图6 各方向上的受力及力矩
由图6可以清晰的看出,在大臂上x,y,z三个方向所受力和力矩的情况,根据对比所取用轴承环的质量可以看出,相比于搬运时所做的功,机器人在克服自身重量所做的功显然更大,接下来,需要将以上的数据记录并保存,为接下来对于其应力分析做准备。
4 机器人大臂的应力分析
通过之前利用ADAMS进行仿真后,对于数据进行整理可知,机器人大臂连接处在x轴方向所受最大的力为65.54 N,y轴方向所受最大的力为726.11 N,z轴方向所受最大的力为38.90 N。x轴所受的最大扭矩为2.686e+5 newton*mm,y轴所受的最大扭矩为3.431e-9 newton*mm,z轴所受的最大扭矩为2.650e+5 newton*mm。
4.1 机械臂网格划分
机械臂的应力分析为有限元分析,所以需要将大臂模型进行前处理,大臂尺寸如图7所示,将大臂模型导出为step文件,然后导入到hypermesh中进行前处理[13]。
将大臂实体模型划分为有限元模型,即划分3D网格,根据图7中的大臂尺寸,可知机械臂的尺寸较大,所以将网格尺寸选为10 mm,在能划分成规整六面体的大臂主体中直接使用automesh进行3D网格划分,而在大臂的末端连接处由于结构连接相对复杂,在解决此问题时使用了先生成2D网格,再将其拉伸为3D网格的方法。在所有网格都生成后,进行单元的连续性矫正,使用face面板来检测距离过大的单元,最后用preview equiv进行筛选,用equivalence进行矫正,最终完成3D网格划分(图8)[14]。

图7 大臂尺寸

图8 网格划分图
4.2 机械臂的应力分析
将已经完成划分的大臂导出为inp文件,并在有限元分析软件ABAQUS中进行导入,将大臂模型添加属性与截面等关键步骤,采用动力学进行分析,最后将在ADAMS中测得的数据进行载荷的施加。
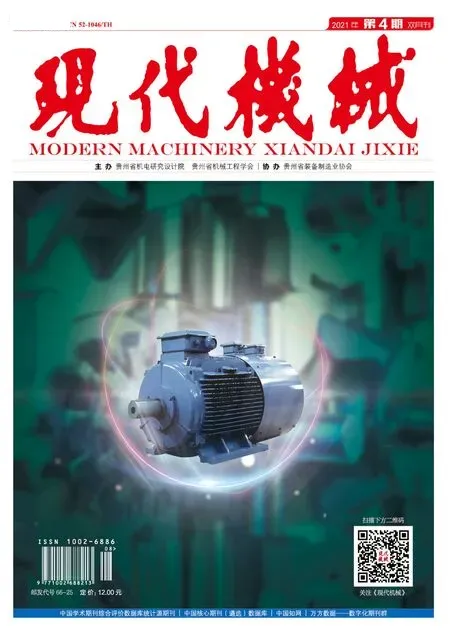
在施加载荷的过程中,由于力与力矩随时间的变化,所以各个方向上的最大力与力矩并不出现在同一时间,所以分别对三个方向的力进行了各自的应力分析,情况如图9。
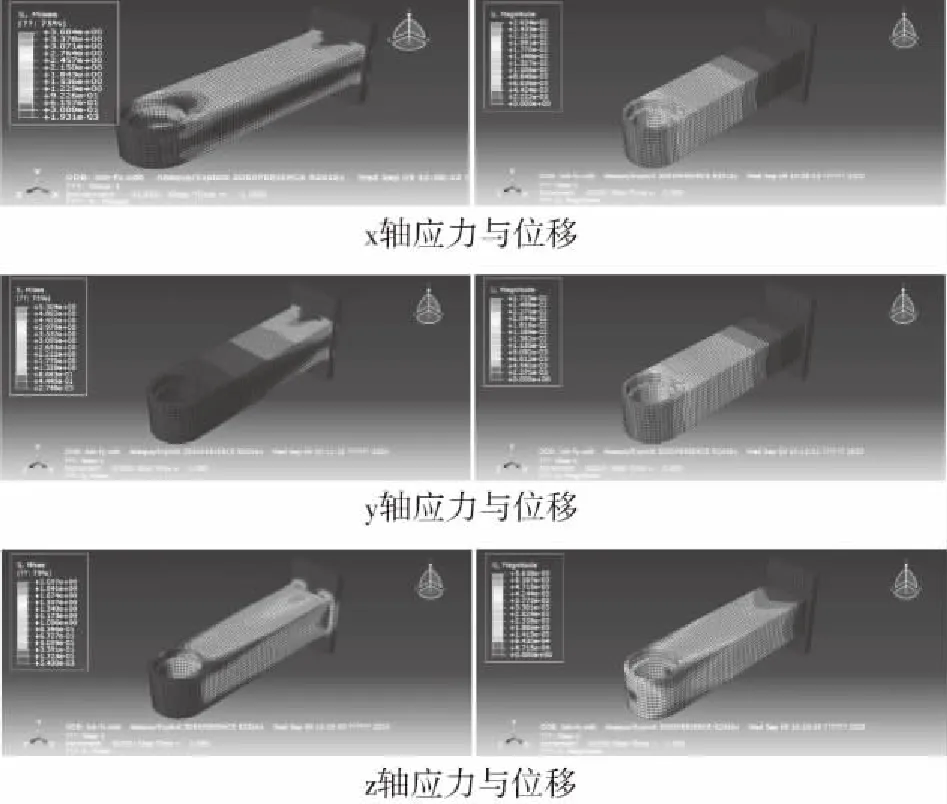
图9 应力及位移分析图
通过图像可以看出,在三种受力情况下所受应力最大为5.304 MPa,最大位移为2.725e-2 mm,可见在此工况下对于工业机器人的许用应力以及精确度都可以很大程度的满足,针对这种还有许多余量情况,将三种载荷同时施加在机械臂上,测试下机械臂的极限工况(图10)。
图10 极限工况
虽然在实际工作状态下不会产生这种状况,但是为了观察大臂在极限状态下的受力状况,在极限状态下,大臂所受的最大应力为10.20 MPa,最大位移为5.49e-2 mm,依然可以在很大程度满足工业机器人许用应力的同时,保持较小的形变。
5 结论
本文根据轴承环夹取机器人模型,建立了其数学模型,使用D-H对机器人进行动作规划与速度曲线的设计,在规定的工况下进行其动力学分析,并在确定边界条件的情况下,进行应力与位移的分析。
根据最后的实验结果可以看出,在极限的工况下机器人大臂的最大应力仅为5.304 MPa,最大位移仅为2.725e-2 mm,结果表明,与机器人的许用应力220 MPa相比,机器人的精度与应力值在很大程度上满足了要求,表明了其具有很大的优化空间,为后期将要进行的拓扑优化提供了依据。
猜你喜欢
包装与食品机械(2021年5期)2021-11-06
环境技术(2021年4期)2021-09-11
河北省科学院学报(2020年1期)2020-05-25
制造技术与机床(2019年12期)2020-01-06
重型机械(2019年3期)2019-08-27
组合机床与自动化加工技术(2019年5期)2019-05-24
制造技术与机床(2018年11期)2018-11-23
载人航天(2016年4期)2016-12-01
海军航空大学学报(2015年1期)2015-11-11
综合智慧能源(2014年1期)2014-09-10