
一种割幅可调割草机调幅机构的设计
2021-09-03 10:51高辉松方伟健崔银轩韩钊薛金林
安徽农业科学 2021年14期
高辉松 方伟健 崔银轩 韩钊 薛金林

摘要 针对果园除草尤其是株间除草机械化作业难的问题,设计开发具有割幅可调功能的割草机对于提高果园除草机械化作业具有重要意义。基于果园除草机械化作业特点,确定了基于连杆机构的割幅可调割草机方案;建立了割草机调幅机构的理论模型,并对割草机调幅机构作业参数进行了设计和计算;在此基础上设计开发了割草机调幅机构的优化轨迹,并对机构相关参数进行了理论计算。根据理论计算结果,选择直线形轨道,并进行了仿真分析。仿真结果表明:直线形轨道的效率随着滑杆的移动从48.389%增至85.975%,能满足设计要求。在预定割幅范围的杂草均能被割除,且运动过程中载荷突变值较小,对材料强度要求较低。该调幅机构能够满足工作要求,可为产品开发提供理论依据。
关键词 自动避障;割草机;液压系统
中图分类号 S 224.1 文献标识码 A 文章编号 0517-6611(2021)14-0196-04
Abstract Aiming at the difficulty of weeding mechanization in orchard, especially in interplant weeding,it is of great significance to design and develop a mower with adjustable cutting width for improving the weeding mechanization in orchard. In this paper, based on the characteristics of weeding mechanization in orchard, the scheme of adjustablewidth mower based on link mechanism was determined. The theoretical model of mowers amplitude modulation mechanism was established,and the operating parameters of mower amplitude modulation mechanism were designed and calculated. On this basis, the optimal orbit of amplitude modulation mechanism of the mower was designed and developed, and the relevant parameters were theoretically calculated. According to the theoretical calculation results, the circular orbit was selected and simulated. Simulation results showed that the linear orbits efficiency changed from 48.389% to 85.975% with the movement of the slider, it could satisfy the designed requirements. All of the grass in the predetermined swath could all be cut. The mutation value of the load in the moving process was lower,thus the strength demand of materials was lower. The amplitude modulation mechanism could satisfy the work demands and provide theoretical basis for the related products development.
Key words Automatic obstacle avoidance;Mower;Hydraulic system
基金項目 江苏省农业科技自主创新资金项目(CX(18)1007A02)。
作者简介 高辉松(1978—),男,山东临沂人,讲师,博士,从事农业机械化工程研究。
*通信作者,教授,博士,博士生导师,从事现代农业装备智能化研究。
收稿日期 2020-12-07
割草机在果园除草作业中起着至关重要的作用,能够有效提升果园除草作业的效率。但是,果树株间杂草依靠传统割草机无法有效清除,而割幅可调割草机能够在很大程度上解决果园株间除草机械化作业难的问题。割幅可调割草机调幅机构的设计及研发对于提高果园生产效率、降低生产成本具有重要意义。王新彦等[1]对零转弯半径割草机的研究表明固定割幅割草机无法满足不同环境下的割草需求。江苏科技大学研发的一种液控变割幅坐骑式割草机可以通过液压泵作为动力源,依靠液压泵直接推动支撑板来实现割幅的调整,并且可以实现无级调整[2]。类似地,淮阴工学院研发的可调割幅旋转式割草机,其调整割幅通过油缸驱动左右割刀得以实现[3]。河北农业大学研发的一种调幅式果园割草机,其调幅是通过液压系统直接推动仿形臂支架得以实现的[4]。郑儒宏[5]设计的零转弯半径割草机变割幅割草器可以通过将子刀盘改变的方式来调整割幅,但该方式较为复杂。冯运发等[6]通过运用图像识别技术和伺服电机,在零转弯半径割草机上实现了割幅的自动调整。娄玉印等[7]研发了一种可控连杆式多自由度割草机,其在提高自由度的同时减少了割盘数目,导致割草效率降低。目前市面上销售的随行自走式果园割草机(有些采用双离合结构),实现了机具行走与割草作业的分别控制[8-9]。国内已有厂商通过增加可伸缩的刀盘,并由齿轮箱输出端带动刀具转动,实现了割幅调整[10]。国外,德国克拉斯公司生产的中央传输侧悬挂割草机,采用两点悬挂,动力输出轴转速达1 000 r/min,但其割幅调整不能实现自动化[11]。白璐璐[12]设计的割草机可通过调节仿形臂摆动角度来适应不同的果园生草带宽度。
笔者在分析现有调幅机构的基础上,提出一种新的设计思路,开发出一种基于连杆机构的割幅可调割草机,并分析其效率随参数的变化情况,得到最终的优化解。
1 割幅可调割草机设计方案
1.1 方案分析及确定
目前存在的割幅可调割草机大多分为以下三类,采用绘制机构运动简图的方式来进行描述[13]。
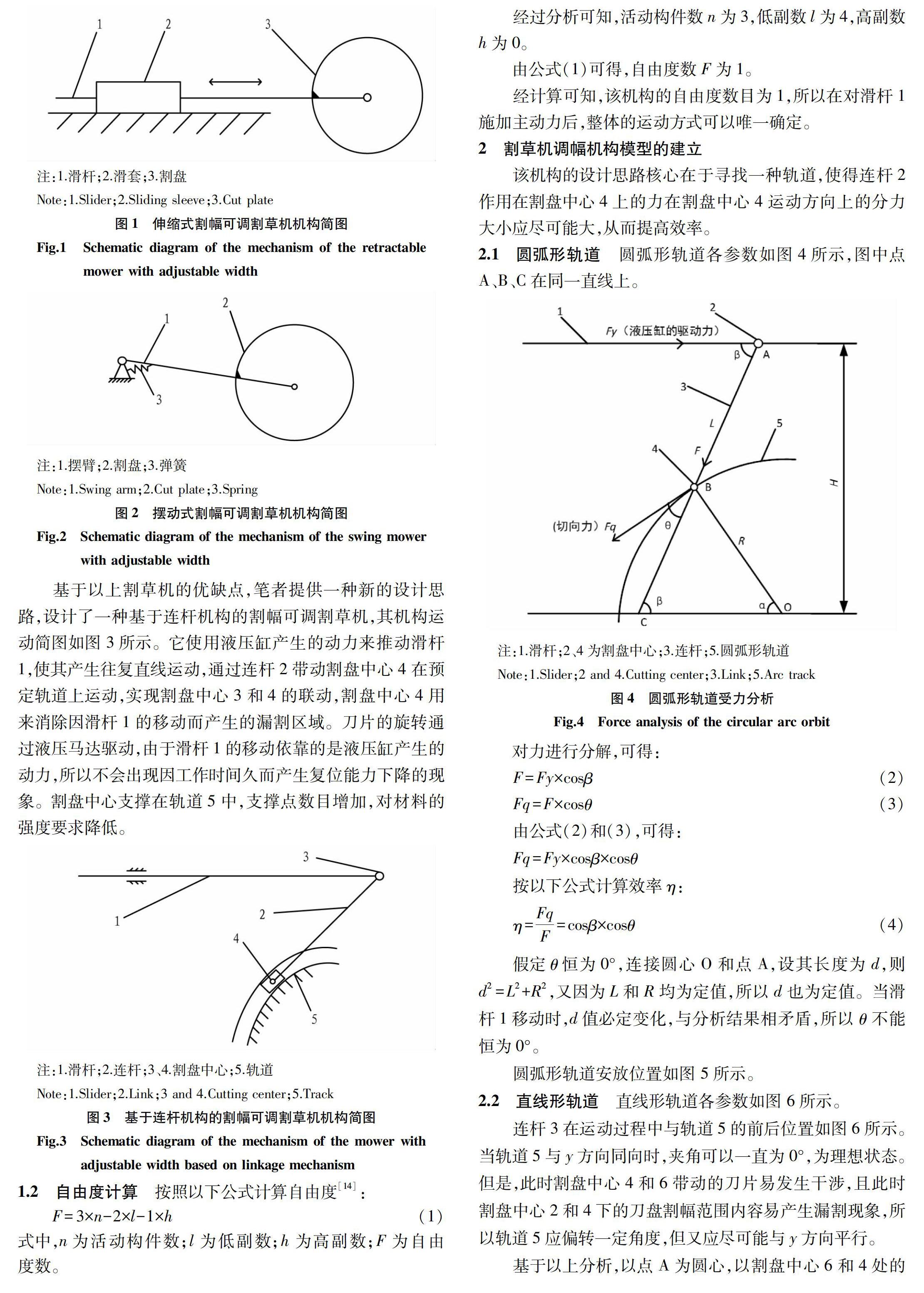
第一类为伸缩式割幅可调割草机,其机构运动简图如图 1所示。该割草机依靠滑杆1的往复移动来实现割幅可调节,其优势在于结构简单,工作可靠。但是,当滑杆1向右移动时,其结构类似于悬臂梁,对材料强度的要求随之提高。
第二类是摆动式割幅可调割草机,其机构运动简图如图 2所示。刀盘2遇到障碍时摆动,压缩弹簧3,割幅减小;经过障碍后,弹簧力使得刀盘2复位,割幅增加。其优势在于结构简单,但其刀盘的回位需要依靠弹簧,长久工作后弹簧会老化,复位能力下降。
基于以上割草机的优缺点,笔者提供一种新的设计思路,设计了一种基于连杆机构的割幅可调割草机,其机构运动简图如图 3所示。它使用液压缸产生的动力来推动滑杆1,使其产生往复直线运动,通过连杆2带动割盘中心4在预定轨道上运动,实现割盘中心3和4的联动,割盘中心4用来消除因滑杆1的移动而产生的漏割区域。刀片的旋转通过液压马达驱动,由于滑杆1的移动依靠的是液压缸产生的动力,所以不会出现因工作时间久而产生复位能力下降的现象。割盘中心支撑在轨道5中,支撑点数目增加,对材料的强度要求降低。
1.2 自由度计算
按照以下公式计算自由度[14]:
F=3×n-2×l-1×h(1)
式中,n为活动构件数;l为低副数;h为高副数;F为自由度数。
经过分析可知,活动构件数n为3,低副数l为4,高副数h为0。
由公式(1)可得,自由度数F为1。
经计算可知,该机构的自由度数目为1,所以在对滑杆1施加主动力后,整体的运动方式可以唯一确定。
2 割草机调幅机构模型的建立
该机构的设计思路核心在于寻找一种轨道,使得连杆2作用在割盘中心4上的力在割盘中心4运动方向上的分力大小应尽可能大,从而提高效率。
2.1 圆弧形轨道
圆弧形轨道各参数如图4所示,图中点A、B、C在同一直线上。
假定θ 恒为0°,连接圆心O和点A,设其长度为 d,则d2=L2+R2,又因为L和R均为定值,所以d也为定值。当滑杆1移动时,d值必定变化,与分析结果相矛盾,所以θ 不能恒为0°。
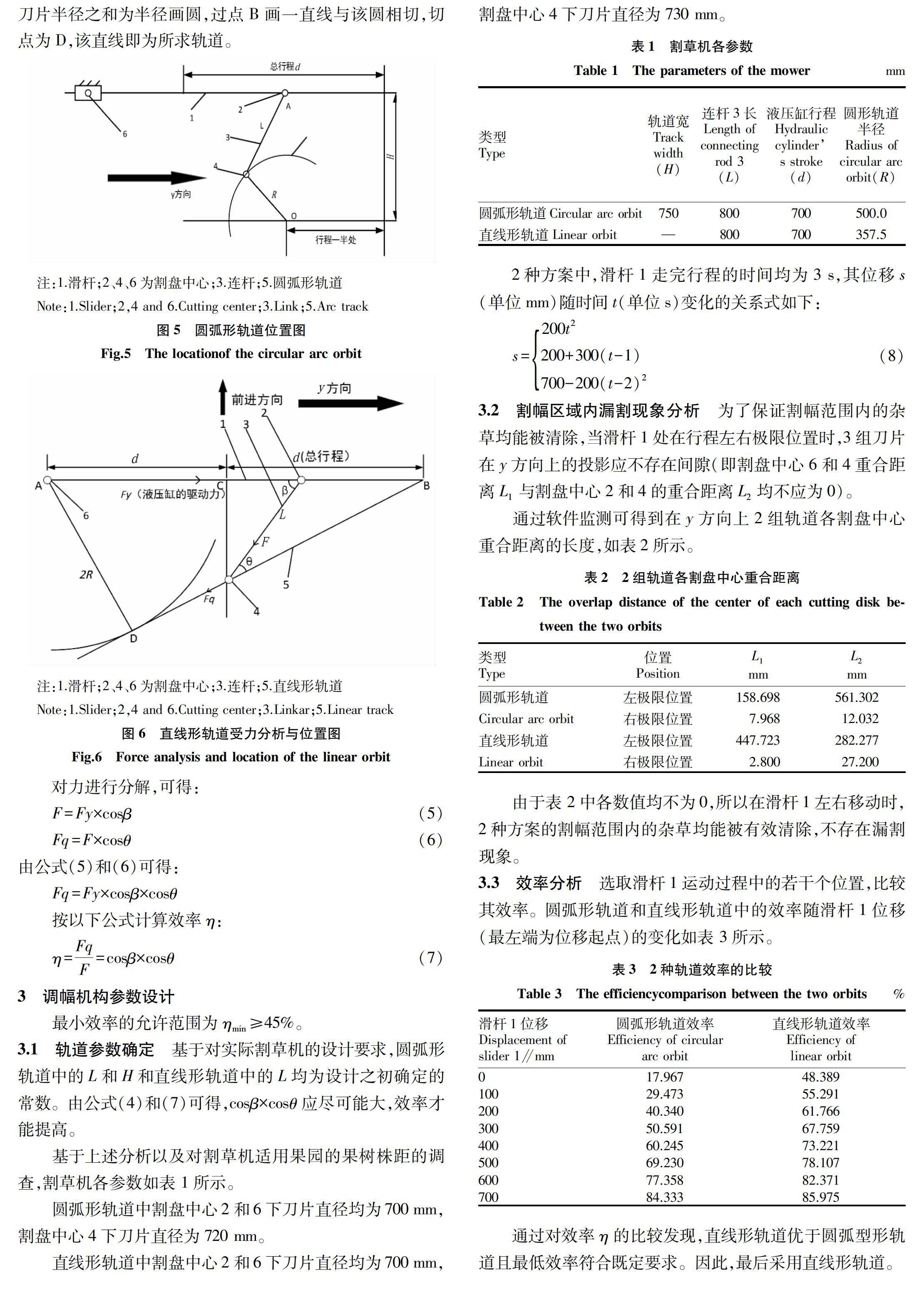
圆弧形轨道安放位置如图 5所示。
2.2 直线形轨道
直线形轨道各参数如图 6所示。
连杆3在运动过程中与轨道5的前后位置如图6所示。当轨道5与 y 方向同向时,夹角可以一直为0°,为理想状态。但是,此时割盘中心4和6带动的刀片易发生干涉,且此时割盘中心2和4下的刀盘割幅范围内容易产生漏割现象,所以轨道5应偏转一定角度,但又应尽可能与 y 方向平行。
基于以上分析,以点A为圆心,以割盘中心6和4处的刀片半径之和为半径画圆,过点B画一直线与该圆相切,切点为D,该直线即为所求轨道。
3 调幅机构参数设计
最小效率的允许范围为 η min≥45%。
3.1 轨道参数确定
基于对实际割草机的设计要求,圆弧形轨道中的 L和H和直线形轨道中的L 均为设计之初确定的常数。由公式(4)和(7)可得,cos β ×cos θ 应尽可能大,效率才能提高。
基于上述分析以及对割草机适用果园的果树株距的调查,割草机各参数如表 1所示。
圆弧形轨道中割盘中心2和6下刀片直径均为700 mm,割盘中心4下刀片直径为720 mm。
直線形轨道中割盘中心2和6下刀片直径均为700 mm,割盘中心4下刀片直径为730 mm。
3.2 割幅区域内漏割现象分析
为了保证割幅范围内的杂草均能被清除,当滑杆1处在行程左右极限位置时,3组刀片在 y 方向上的投影应不存在间隙(即割盘中心6和4重合距离 L1 与割盘中心2和4的重合距离 L2 均不应为0)。
通过软件监测可得到在 y 方向上2组轨道各割盘中心重合距离的长度,如表2所示。
由于表 2中各数值均不为0,所以在滑杆1左右移动时,2种方案的割幅范围内的杂草均能被有效清除,不存在漏割现象。
3.3 效率分析
选取滑杆1运动过程中的若干个位置,比较其效率。圆弧形轨道和直线形轨道中的效率随滑杆1位移(最左端为位移起点)的变化如表 3所示。
通过对效率 η 的比较发现,直线形轨道优于圆弧型形轨道且最低效率符合既定要求。因此,最后采用直线形轨道。
4 仿真分析
4.1 夹角仿真分析
依据图6,对直线形轨道方案采用CATIA的DMU模块进行运动机构分析,并监测其效率随滑杆1位移的变化情况。
直线形轨道效率随滑杆1位移的变化如图 7所示。
仿真表明:当轨道呈直线形时,最低效率为48.389%,最高效率为85.975%,可满足既定要求。
4.2 速度与加速度分析
割盘中心4加速度随时间的变化如图8所示。
仿真试验表明,加速度的最大突变发生在第1秒,点1加速度为0.334 7 m/s2,点2加速度为0.034 4 m/s2。
5 结论
研制了一种割幅可调割草机调幅机构,并通过软件仿真得出了轨道效率以及割盘中心4加速度的变化情况,主要结论如下:
(1)相较于圆弧形型轨道,在滑杆1运行到相同行程处時,直线形轨道的效率较高,且满足既定的效率要求。
(2)基于上述直线形轨道的参数,割幅范围内不存在漏割现象,且能够在较高效率下正常作业。
(3)直线形轨道加速度的突变值较小,因此载荷的突变也较小,降低了对材料的强度要求。
参考文献
[1] 王新彦,周浩,刘勇,等.零转弯半径割草机变割幅割草器研究[J].农机化研究,2016,38(8):12-18,23.
[2] 江苏科技大学.一种液控变割幅坐骑式割草机:CN201410784597.3[P].2015-04-22.
[3] 淮阴工学院.可调割幅的旋转式割草机:CN201810239688.7[P].2018-08-31.
[4] 河北农业大学.一种调幅式果园割草机:CN201720391492.0[P].2017-11-21.
[5] 郑儒宏.零转弯半径割草机变割幅割草器研究[J].南方农机,2017,48(6):13,27.
[6] 冯运发,王新彦,田启航,等.ZTR割草机自动变割幅结构及控制系统设计[J].农机化研究,2019,41(5):97-101,106.
[7] 娄玉印,朱建华,刘光浩.新型连杆式割草机的结构设计与运动学分析[J].农机化研究,2018,40(4):41-46.
[8] 中农博远9GS-1.6果园割草机[J].现代农机,2018(5):45.
[9] 王鹏飞,刘俊峰,高迎,等.随行自走式果园割草机的设计与试验研究[J].农机化研究,2016,38(9):99-103.
[10] 常州市福美好机械有限公司.一种可伸缩割草机:CN201620857372.0[P].2017-02-08.
[11] 杨宏伟,张艳红.国内外割草机械发展概况[J].农业工程,2016,6(4):19-20,32.
[12] 白璐璐.悬挂式调幅果园割草机设计与仿形研究[D].保定:河北农业大学,2016.
[13] 李钝,文圣香,姜海翔.论机构运动简图符号的模型描述语言本质[J].荆楚理工学院学报,2011,26(12):63-65.
[14] 孙桓,陈作模,葛文杰.机械原理[M].8版.北京:高等教育出版社,2013:10-20.
猜你喜欢
民间故事选刊·上(2022年4期)2022-04-17
民间故事选刊(2022年7期)2022-04-15
中国诗歌(2019年2期)2019-11-15
环球时报(2019-06-11)2019-06-11
诗潮(2019年1期)2019-01-25
东方教育(2016年3期)2016-12-14
中国教育技术装备(2016年20期)2016-12-12
大学教育(2016年9期)2016-10-09
科技视界(2016年20期)2016-09-29
