船舶甲板智能抛丸机器人设计
2021-09-07 02:08何家健
造船技术 2021年4期
何家健
(中国船舶重工集团公司第七一六研究所,江苏 连云港 222000)
0 引 言
船舶在海上行驶,受到海水、盐雾、海生物等影响,在建造与航行阶段甲板或多或少会产生锈蚀[1]。为延长船舶的使用寿命需要对甲板进行处理,即对焊缝及局部区域进行除锈、拉毛等施工,主要采用人工砂轮打磨,该方式存在施工效率低、质量不稳定等问题,所产生的粉尘并未回收,直接排至大气中,对人身和周围环境造成严重伤害[2]。
目前,钢板除锈方式分为机械除锈、喷砂除锈、高压水射流除锈和抛丸除锈等4种。机械除锈主要由人工手持打磨机进行除锈,该方式用途广泛,但缺点明显:效率低、污染严重,因此不符合涂装绿色发展需求。喷砂除锈借助压缩空气动力将钢砂喷至钢材表面,利用冲击力清理表面的铁锈和氧化皮[3],该方式的优点是效率高,但缺点是清理成本较高、污染严重,长期工作的工人具有患尘肺病的风险。高压水射流利用超高压将水加压至数百个大气压,并通过细小孔径喷射,具有巨大的打击能量,可将锈斑和铁皮等剥离[4],该方式具有清洗速度快、适用各种复杂结构件的优点,但缺点是初始投资成本较高,在处理后易出现闪锈[5]。抛丸除锈利用抛丸机叶轮旋转产生离心力将丸料以较高的线速度抛向钢材表面,产生击打和磨削作用,去除钢材氧化皮和锈蚀并使表面呈现一定程度的粗糙度,抛丸机往往配备除尘器,无尘、无污染,是一种效率高的环保除锈工艺[6-7]。
虽然目前抛丸工艺技术比较成熟,但均为人工推动设备前进,自动移动式抛丸机器人在国内尚属于空白,因此设计一款从实际使用需求角度出发的机器人尤为迫切和重要,以减少人工数量及减轻环境危害为目的,实现船舶甲板除锈的手动遥控和自动抛丸作业[8-11]。
1 智能抛丸机器人系统组成
为满足表面清理的工作要求,机器人采取模块化设计。智能抛丸机器人系统主要由抛丸分系统、除尘分系统、遥控装置、越障辅助机构、连接电缆和回收软件及转运箱组成。智能抛丸机器人系统布局如图1所示。甲板配电柜通过控制电缆为除尘分系统供电;分系统之间通过电缆、气管回收软管连接,底部放置管线支撑小车;由于甲板上的障碍较多,船厂起重机资源较紧张,因此配备越障辅助机构;安装反光柱以便激光导航扫描地图更完整。

图1 智能抛丸机器人系统布局
2 智能抛丸机器人硬件设计
2.1 抛丸分系统硬件设计
抛丸分系统硬件设计在已有抛丸机基础上进行改进。增加补料仓和料位不足检测功能,自动控制补料仓切换阀实现丸料补充;增加进料口丸料阀,控制丸料是否进入抛丸轮;采用行走转向电机,实现前进、后退、爬坡和转弯等移动功能;配套车载控制器,实现移动控制、与除尘分系统信息交互、定位数据分析采集(预留软件接口)、避障控制及提供数字信号输入(Digital Input,DI)/数字信号输出(Digital Output,DO)接口经继电器开关对抛丸作业进行控制;配套抗干扰能力强的工业级无线发送器和接收器,具备远程遥控功能,同时控制抛丸行走单元和除尘行走单元;配套激光扫描测量系统,预留软件接口用于实现对抛丸分系统的实时定位功能;配套安全激光扫描仪,实现抛丸分系统避障功能;提供蜂鸣器和报警灯,具备故障检测和报警功能。改进后的抛丸分系统如图2所示:舵轮及控制箱固定于抛丸机前部;安全激光扫描仪固定于抛丸机斜对角处;激光扫描器固定于控制箱上方。

图2 改进后的抛丸分系统
2.2 除尘分系统硬件设计
除尘分系统在除尘机基础上进行改进。更改原有除尘机布局,减小部分部件尺寸,缩小原有除尘机整机体积,增强除尘分系统对船舶甲板紧凑空间的适应性;更换行走机构,采用行走转向电机,实现前进、后退、爬坡和转弯等移动功能;配套车载控制器,实现移动控制、与抛丸分系统信息交互、避障控制及提供DI/DO接口经继电器开关对除尘作业进行控制;配套抗干扰能力强的工业级接收器,与抛丸分系统共享发送器,具备远程遥控功能;配套超声波传感器,实现除尘分系统避障功能;增加故障检测和报警功能,提供报警灯。改进后的除尘分系统如图3所示:除尘箱位于除尘分系统前部上面,底部是储灰斗;空压机位于除尘分系统后部上面;控制电柜位于空压机侧面;除尘电机位于除尘分系统后部下面;舵轮位于除尘电机后下方。

图3 改进后的除尘分系统
2.3 越障辅助机构设计
在越障时可使用船厂起重机,但在一般情况下协调起重机资源比较麻烦,只能考虑在大区域不便利转运的情况下才使用船厂起重机。普通越障依赖越障辅助机构,用于辅助智能抛丸机器人系统越过不能通过行走绕过的障碍区域。抛丸分系统和除尘分系统本身需要配备包装箱,可通过包装箱的改进性设计实现兼顾越障功能。在遇到道路障碍(障碍物高度小于200 mm)时,可将转运箱体移动至障碍物上方,将脚轮锁紧,打开箱门,一端放置地面,接通电源遥控控制设备从箱体中移动出来。
抛丸分系统和除尘分系统均保留吊装孔,可通过吊装方式越过障碍,因此越障辅助机构设计为一个可拆卸组装的小型龙门架,在龙门架上配备电动葫芦实现设备的吊装功能,底部配备重型刹车万向脚轮实现移动功能。小型龙门架如图4所示。

图4 小型龙门架
3 智能抛丸机器人软件设计
智能抛丸机器人软件设计如图5所示。

图5 智能抛丸机器人软件设计
智能抛丸机器人软件主要包括抛丸分系统控制器软件和除尘分系统控制软件。2种控制器程序均可通过固定在除尘分系统上的工业平板完成编辑和编译,并通过以太网下载至对应的控制器内。抛丸分系统与除尘分系统在行走功能上类似,均具有直线前进、后退、转弯功能,抛丸分系统还具有一键掉头功能。上述几种功能均与控制舵轮的速度、转向与转角角度有关,为保证程序的模块化设计,将舵轮控制设计为通用模块,通过不同的输入指令(直线行驶、转弯、一键掉头)实现不同的行走功能。上电自检与系统状态采集模块基本实现原理相同,所采集的信号也基本一致,因此将上述2种模块进行统一设计。通用型模块分别为系统上电自检模块、实时状态采集模块、抛丸除尘设备使能模块、舵轮控制模块、抛丸功能模块、除尘功能模块及加料功能模块;建立5个专用型模块,分别为直线行驶模块、转弯模块、一键掉头模块、遥控抛丸模块及自主导引模块。
4 智能抛丸机器人操作方式
4.1 手动遥控方式
手动遥控操作流程如图6所示。
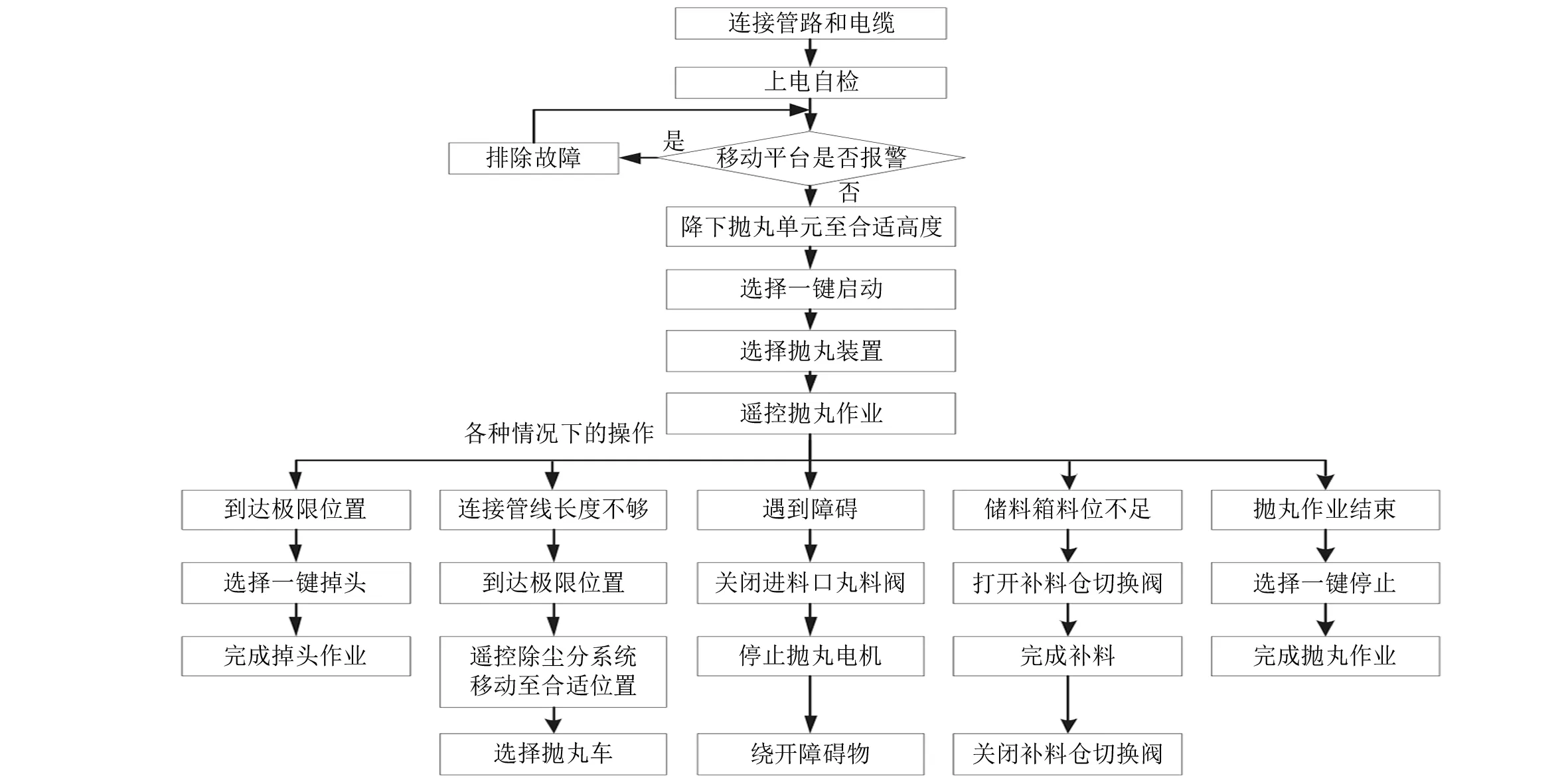
图6 手动遥控操作流程
排除机器人故障并进行场地清理,人工通过升降机构将抛丸机构与待加工甲板调整至合适距离。在遥控器上通过操作模式切换模块切换为遥控抛丸。通过显示模块设置作业参数,选择一键启动,依次启动除尘电机、第一抛丸电机、第二抛丸电机和进料口丸料阀。在遥控器上通过抛丸或除尘选择模块选择抛丸作业,遥控抛丸装置开始抛丸作业。如果抛丸装置行走期间遇到障碍,通过一键停止模块关闭进料口丸料阀并停止第一抛丸电机和第二抛丸电机,通过手柄遥控抛丸装置绕开障碍物行走。如果显示模块提示储料箱料位不足,通过补料仓切换阀启动/停止打开补料仓切换阀进行补料,补料完成关闭补料仓切换阀。如果除尘装置与抛丸装置之间的距离超过中间软管规定的工作范围,在遥控器上选择除尘作业,遥控除尘装置移动至合适位置,选择抛丸作业。
4.2 导引规划方式
导引规划操作流程如图7所示。排除机器人故障并进行场地清理,进行抛丸装置行走速度校准。通过手柄遥控抛丸装置在工作区域行走,通过激光导航扫描模块获取周围位置信息,在显示模块上进行现场地图创建、行走路径规划和作业参数设置。人工通过升降机构将抛丸机构与待加工甲板调整至合适距离,在遥控器上通过操作模式切换模块将操作模式切换为自动导航抛丸。人工辅助整理软管,抛丸装置自动按照预定行走路径执行抛丸作业。

图7 自主导引操作流程
5 实船甲板测试
准备S390钢丸、S280钢丸、S280钢丸+G25钢砂和钢丝切丸1.0进行测试,分别将丸料导入箱内进行实船甲板测试。测试数据如表1所示。
6 结 语
经现场测试验证,所设计的智能抛丸机器人可完成船舶甲板的除锈与清理,具备效率高、污染轻、操作简便的特点,可用于船舶修造、桥梁施工等领域大范围涂装前的预处理,如主甲板、货舱底、合龙焊缝的除锈除漆等。
猜你喜欢
小学生优秀作文(低年级)(2021年11期)2021-12-06
广东交通职业技术学院学报(2020年4期)2021-01-21
船舶标准化工程师(2020年1期)2020-06-12
机械研究与应用(2020年2期)2020-05-21
语文世界(小学版)(2019年2期)2019-02-24
知识文库(2018年11期)2018-10-20
中国铸造装备与技术(2017年3期)2017-06-21
中国铸造装备与技术(2017年3期)2017-06-21
国防(2017年12期)2017-04-09
小天使·一年级语数英综合(2014年7期)2014-06-26