桥梁结构模态参数识别中系统阶次的自动辨识算法
2021-09-08 01:02陈永高钟振宇
振动工程学报 2021年4期
关键词:桥梁结构
陈永高 钟振宇
摘要: 随机子空间算法作为时域模态分析的常用算法之一,存在系统定阶需人为参与这一缺陷。基于此,针对奇异值跳跃法难以确定高阶系统阶次这一问题,提出了将其与“对数化处理”进行融合以便快速确定奇异值的明显跳跃点;通过构建频率置信因子和振型置信因子用于确定真实阶次的取值范围;采用线性加权平均法构建置信系数以确定结构系统的真实阶次;将所提算法运用于某大型斜拉桥的模态参数识别,并将识别结果与现场试验值和有限元结果进行对比分析。结果表明,所提算法能够实现系统阶次的自动化确定和模态参数的自动化识别,且识别结果具有较好的精度和可靠性。
关键词: 桥梁结构; 参数识别; 模态振型; 随机子空间算法; 系统定阶
引 言
模态分析[1]作为结构健康监测[2]的重要环节之一,能够为结构振动[3]控制、受损程度、运行状态提供可靠的依据。模态分析[4]大致分为三大类,分别是时域模态分析、频域模态分析以及时频域模态分析。随机子空间算法[5]作为时域模态分析中的主要算法之一,具有无需高阶模型、输入参数少和结果收敛性好的优点而被广泛运用于桥梁结构模态参数识别中。随着该识别算法被人们所熟知,其缺点也逐渐凸显,其主要缺陷在于需人工参与系统阶次的确定,导致定阶结果具有人为主观性;同时由于噪声信号的影响,以致人工定阶的结果难以满足实际工程的需求。为了克服基于随机子空间算法在模态参数识别过程中出现的人为定阶问题,提出了一种新的系统阶次自动辨识算法以实现模态参数结果的智能化识别,有效地提高桥梁结构模态参数识别的工作效率。
1 常用定阶算法
随机子空间算法分为协方差驱动随机子空间算法(Covariance?driven Stochastic Subspace Identification, COV?SSI)和数据驱动随机子空间算法(Data?driven Stochastic Subspace Identification, DATA?SSI),两种算法均需人工参与系统阶次的确定。就系统阶次的定义而言,可以理解为:模态分析的本质是求矩阵的特征值问题,“阶数”代表特征值的个数,将特征值从小到大排列就是阶次;系统阶次与自由度相对应,结构为N自由度系统,则系统有N阶固有频率;同时阶数与振型相对应,有多少个阶数就有多少个振型。
现阶段常用的定阶算法有以下两种:
(1)奇异值跳跃法定阶[6]:首先以结构响应信号为输入数据,以得到相应的奇异值;其次绘制奇异值与状态矩阵阶次[7]的曲线图;再经人工辨识跳跃点;最后确定结构的真实阶次为状态矩阵阶次(跳跃点之前奇异值数总和)的一半[8]。
(2)稳定图法定阶[9]:首先根据结构的自身特点假定一个阶次(需大于真实阶次);其次分别计算各阶次对应的参数结果(包括:频率值、阻尼比以及振型系数);再对比分析相邻阶次各参数结果间的差异,当差异值满足预设的最小限值时,将该点归为稳定点;并构建稳定轴组成最终的稳定图;最后将稳定轴对应的系统阶次作为结构的真实阶次。
2 自动化定阶原理
为实现桥梁结构系统阶次的自动化确定,本文首先对奇异值跳跃法进行改进用于寻找明显的跳跃点,以确定真实阶次的大致范围;其次基于频率稳定的原则,构建频率置信因子用于确定真实阶次的范围;再基于模态置信准则构建振型置信因子再次确定真实阶次的范围;最后采用线性加权平均法构建置信系数用于确定结构的最终真实阶次。以下将详细分析系统阶次的自动化定阶流程。
2.1 奇异值跳跃法的辨识
奇异值跳跃法的基本原理是根据结构响应信号构建Toplitz矩阵,并进行奇异值分解得到正交矩阵和对角矩阵,计算式如下
(1)
为对角矩阵中对角线上的元素,其元素个数即为系统阶次。实际运用中,因结构处于环境激励下以致传感器采集的结构响应信号内往往含有一定的噪声信号,导致中奇异值的跳跃现象有时并不明显。研究结果表明[10],大部分高阶系统随着系统阶次的增加,跳跃现象会越来越不明显。
图1为某大型斜拉桥对应的奇异值与状态矩阵阶次的曲线图,根据该图可知跳跃点仅存在于系统的前几阶中;随着阶次增大,跳跃点的辨识显得很困难。由于奇异值跳跃法定阶的辨识量并非相邻阶次对应的奇异值差值,所以并不能根据图1中相邻阶次奇异值的差值大小来辨识结构的真实阶次。为了直观地辨识高阶系统中奇异值的跳跃现象,可引入统计学中的“对数化”处理[11],即通过对奇异值向量进行对数化处理以便发现奇异值的跳跃现象。选择对数化处理主要是基于如下三方面的原因:
(1)对数化处理后能缩小数据的绝对数值,方便计算;
(2)向量对数化处理后并不会改变数据的性质和相关关系,却能很好地压缩变量的尺度;
(3)向量对数化处理后得到的数据易消除异方差问题。
图2为奇异值对数化处理后与状态矩阵阶次的关系图,根据该图可发现明显的跳跃点发生在阶左右,即可假定该系统的真实模态(真实阶次)大致为。但考虑到桥梁结构一般处于环境激励下,以致传感器采集的加速度响应信号内均存在噪声影响,因此,基于奇异值对数化所得跳跃点确定的系统阶次可能并非最真實的阶次。针对噪声影响系统阶次这一问题,所在项目组做过专门的试验,即分析不同结构在不同信噪比下奇异值跳跃点的存在规律。经过对近1000组数据的分析,发现结构的真实阶次一般在跳跃点的前后一定范围内;将真实阶次的范围定为具有可靠性。
2.2 频率置信因子
相比COV?SSI算法,DATA?SSI在计算投影矩阵时仅需进行一次QR分解,具有更高的计算效率,因此本文以DATA?SSI为识别算法进行结构的模态参数识别。以下将详细分析如何通过构建频率置信因子来实现结构阶次范围的确定。
(1)基于2.1节提出的奇异值对数化法确定系统真实阶次的大致范围;
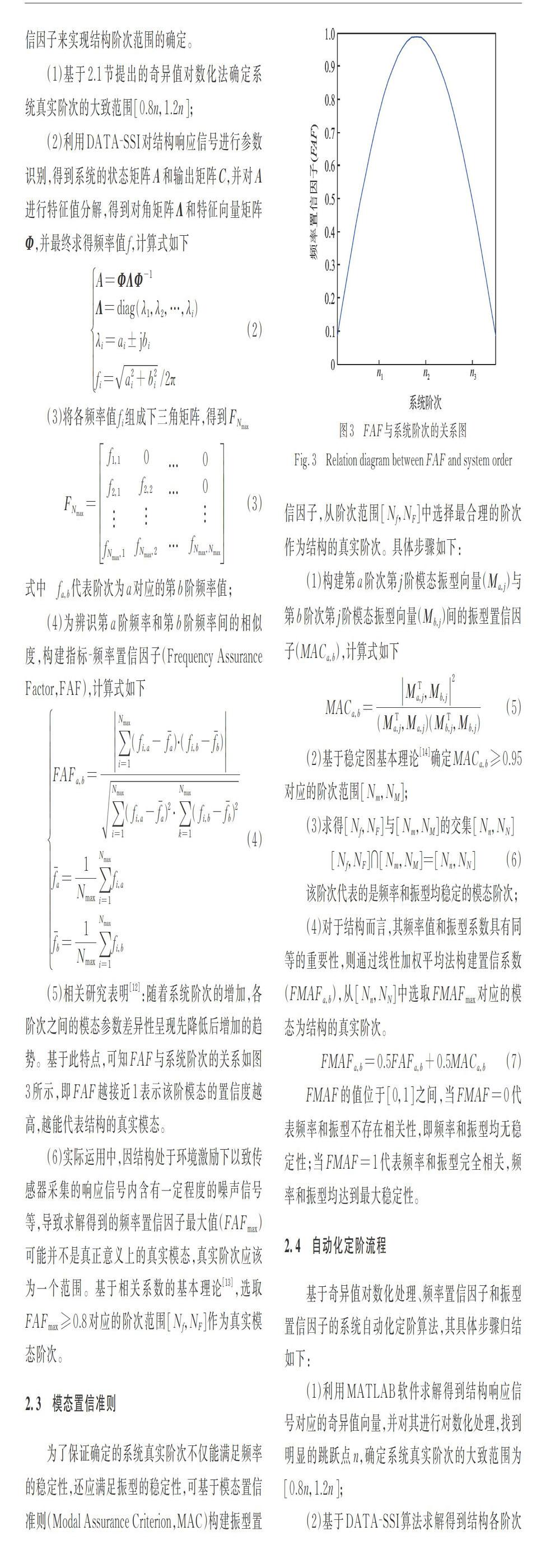
(2)利用DATA?SSI对结构响应信号进行参数识别,得到系统的状态矩阵和输出矩阵,并对进行特征值分解,得到对角矩阵和特征向量矩阵,并最终求得频率值,计算式如下
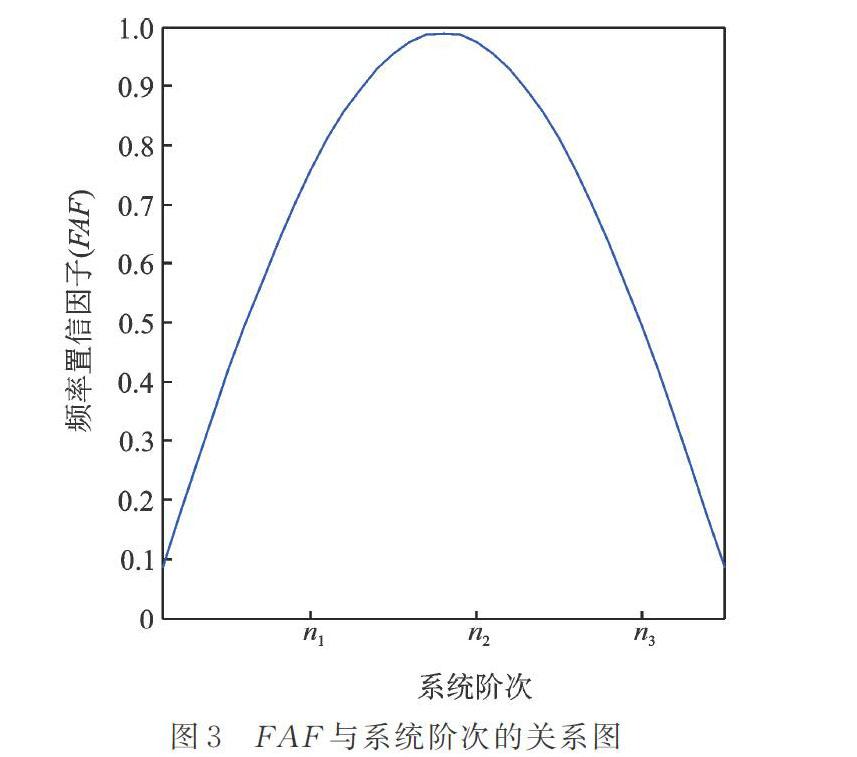
(6)实际运用中,因结构处于环境激励下以致传感器采集的响应信号内含有一定程度的噪声信号等,导致求解得到的频率置信因子最大值()可能并不是真正意义上的真实模态,真实阶次应该为一个范围。基于相关系数的基本理论[13],选取对应的阶次范围作为真实模态阶次。
2.3 模态置信准则
为了保证确定的系统真实阶次不仅能满足频率的稳定性,还应满足振型的稳定性,可基于模态置信准则(Modal Assurance Criterion,MAC)构建振型置信因子,从阶次范围中选择最合理的阶次作为结构的真实阶次。具体步骤如下:
(4)对于结构而言,其频率值和振型系数具有同等的重要性,则通过线性加权平均法构建置信系数(),从中选取对应的模态为结构的真实阶次。
2.4 自动化定阶流程
基于奇异值对数化处理、频率置信因子和振型置信因子的系统自动化定阶算法,其具体步骤归结如下:
(1)利用MATLAB软件求解得到结构响应信号对应的奇异值向量,并对其进行对数化处理,找到明显的跳跃点,确定系统真实阶次的大致范围为;
(2)基于DATA?SSI算法求解得到結构各阶次对应的频率值,构建频率下三角矩阵,基于相似系数的原理求解出频率置信因子(),进而确定系统阶次范围;
(3)构建振型置信因子()确定系统阶次范围;
(4)求解和的交集部分,并基于线性加权平均法求解用于筛选真实阶次的系数?置信系数(),选取最大置信系数对应的模态阶次为结构的真实阶次。
梳理上述流程,可得流程图如图4所示。
3 实际工程算例
3.1 工程概况
为证明所提系统定阶算法能够运用于实际桥梁结构中,以某大型斜拉桥为识别对象进行系统阶次的确定和模态参数的识别。该桥为双塔扇形双索面的塔梁分离悬浮体系斜拉桥,边跨和主跨跨度分别为130 m和360 m,边跨距索塔中心线98.7 m处设置辅助墩,桥面净宽15 m+2×1.5 m人行道。汽车荷载为超20级,人群荷载为,设计水位为三峡正常蓄水位,设计洪水频率为1/300。桥上共布置11组加速度传感器用于采集加速度响应信号,全桥布置图和传感器布置图(红圈部分为传感器位置)如图5所示。信号采样频率为20 Hz,图6为某传感器采集到的响应信号时程图,对应时长为200 s,采样点共计4000个。
3.2 奇异值-对数化定阶
基于2.1节算法流程,分别运用奇异值跳跃法和奇异值?对数化法进行系统阶次的确定,分析的响应信号为11组传感器在1 h内采集的加速度响应信号数据,即每组传感器对应的数据点为72000,结果如图7所示。由图7可知对于大型斜拉桥这种高阶系统,并不能根据奇异值跳跃法辨识系统的阶次;但对奇异值取对数化之后发现在状态矩阵阶次等于300阶时奇异值发生了明显地跳跃,即该桥梁结构的真实系统阶次大致范围为[120,180]。
3.3 自动化定阶
根据频率置信因子确定阶次范围为[143,159],根据振型置信因子确定的阶次范围为[147,153],两者的交集阶次范围为[147,153],各阶次对应的置信系数如表1所示。根据表中数据可知,该桥梁结构的真实阶次为150。
4 模态参数识别结果
利用DATA?SSI算法识别得到该桥梁结构的稳定图,如图8所示。为验证所提算法能实现桥梁结构模态参数的自动化识别,以下将该识别结果与真实的动载试验结果以及MIDAS有限元模型所得结果进行对比。
在桥梁结构的主跨跨中采用跳车激振的方式对结构产生激励,并利用加速度传感器采集结构的响应信号,最后对该响应信号进行分析识别其自振频率,跳车自振频谱图如图9所示。
利用MIDAS软件建立全桥模型,其中斜拉索和主梁的材质为钢材,弹性模量为,泊松比取值为0.3;主塔采用钢筋混凝土结构,对应弹性模量为,泊松比取值为0.17。其边界条件为:桥墩底和索塔底均固结;主梁结构与桥墩连接处采用刚性连接,且释放梁端约束;主梁结构对应的节点间为弹性连接。全桥节点数为1104个,单元数为1028。利用特征值分析得到该斜拉桥的前5阶频率值。
4.1 频率识别结果
将本文识别所得频率结果和跳车试验结果以及MIDAS有限元结果进行对比,结果如表2所示。由表中数据可知:
(1)前5阶频率值与跳车自振频率值间的差值百分比最大值为1.9%;
(2)前5阶频率值与MIDAS有限元频率值间的差值百分比最大值为4.6%;
(3)三种算法所得结果间的差值均很小,起到了很好的相互验证效果,也进一步证明所提自动化识别算法能够很好地运用于实际桥梁结构的模态参数识别。
4.2 各阶次所得识别结果
为验证所提定阶算法所得的阶次为最佳阶次,假定该桥梁结构的真实阶次分别为147,148,149,150,151,152及153,并基于随机子空间算法识别出各阶次对应的前5阶频率值,具体结果如表3所示。
将各阶次所得结果与跳车自振频率值做对比分析,结果如表4所示;表5为各阶次所得结果与MIDAS有限元频率值间的对比。
对比表4和5可知:
(1)该桥梁结构的真实阶次数为150阶时,其所得前5阶频率值结果与跳车自振频率值间的平均误差百分比是阶次范围[147,153]中最小的,仅为0.8%;
(2)该桥梁结构的真实阶次数为150阶时,其所得前5阶频率值结果与MIDAS有限元频率值间的平均误差百分比是阶次范围[147,153]中最小的,仅为2.5%;
(3)进一步验证了3.3节所得结论具有可靠性,即该桥梁结构的真实阶次为150阶。
4.3 稳定图定阶算法识别结果
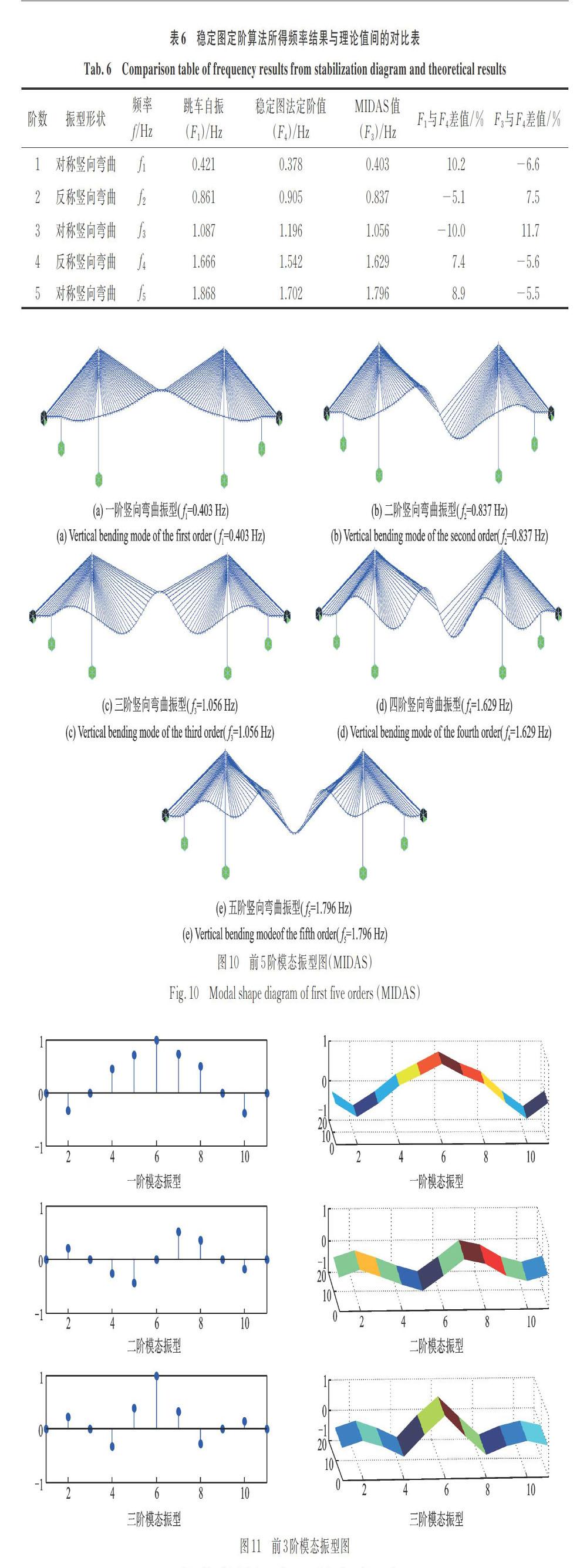
将稳定图定阶算法所得频率结果和跳车试验结果以及MIDAS有限元结果进行对比,结果如表6所示。由表中数据可知:
(1)识别得到的前5阶频率值与跳车自振频率值间的差值百分比最大值为10%;
(2)识别得到的前5阶频率值与MIDAS有限元频率值间的差值百分比最大值为11.7%;
对比表2和表6可知,稳定图定阶算法所得前5阶频率值与跳车自振频率结果和MIDAS频率值间的差距值均大于本文所提定阶算法所得结果与理论值间的差距值,可知本文所提定阶算法比稳定图定阶算法具有更好的识别效率。
4.4 模态振型识别结果
为进一步验证所提识别算法不仅能精确地识别得到频率值,还能识别出模态振型。利用MIDAS模型识别得到该斜拉桥前5阶模态振型如图10所示。图11是所提识别算法所得各传感器节点对应的二维模态振型图和三维模态振型图。对比图10和图11可知,所提算法识别得到的前3阶模态振型与MIDAS所得振型图具有很高的相似度,表明所提算法能够很好地识别出实际桥梁结构的模态振型。
5 结 论
(1)传统的奇异值跳跃法无法精确地找到高阶系统的跳跃點,经对数化处理后,能较为明显地确定跳跃点的位置;
(2)自动化定阶的步骤:首先对奇异值进行对数化处理以寻找明显的跳跃点,并求得系统阶次的大致范围;其次通过构建频率置信因子和振型置信因子分别求得真实阶次的取值范围;最后采用线性加权平均法构建置信系数来最终确定结构系统的真实阶次;
(3)所提定阶算法比稳定图定阶算法具有更好的识别效率;
(4)所提算法能很好地运用于实际桥梁结构的模态参数自动化识别,且识别得到的频率值和模态振型均具有可靠性。
参考文献:
[1] 陈永高,钟振宇.环境激励下桥梁结构信号分解与模态参数识别[J].振动、测试与诊断,2018,38(6):1267-1274.
CHEN Yonggao, ZHONG Zhenyu. Signal decomposition and modal parameter identification for bridge structural under environmental excitation[J].Journal of Vibration, Measurement & Diagnosis, 2018,38(6):1267-1274.
[2] Ubertini F, Gentile C, Materazzi A L. Automated modal identification in operational conditions and its application to bridges[J]. Engineering Structure, 2013,(46):264-278.
[3] Sanchez M A, Castillo O, Castro J R. Generalized Type-2 fuzzy systems for controlling a mobile robot and a performance comparison with Interval Type-2 and Type-1 fuzzy systems[J]. Expert Systems with Applications,2015,(42):5904?5914.
[4] 秦世强.桥梁健康监测与工作模态分析的理论和应用及系统实现[D].成都:西南交通大学,2013.
QIN Shiqiang. Bridge health monitoring and operational modal analysis: Thoery, application and implementation [D]. Chengdu: Southwest Jiaotong University, 2013.
[5] Khan I, Shan D, Li Q. Modal parameter identification of cable stayed bridge based on exploratory data analysis[J].Archives of Civil Engineering,2015,61(2):3?22.
[6] 张小宁.基于随机子空间方法的结构模态参数自动识别[D].哈尔滨:哈尔滨工业大学,2012.
ZHANG Xiaoning. Stochastic subspace method for automotive identification of structural modal parameters[D]. Harbin: Harbin Institute of Technology,2012.
[7] 王 秒.基于随机子空间法的环境激励模态参数识别[D]. 大连:大连理工大学,2019.
WANG Miao. Modal analysis identification under ambient excitations using stochastic subspace method[D].Dalian: Dalian University of Technology,2019.
[8] 王树青,林裕裕,孟元栋,等.一种基于奇异值分解计算的模型定阶方法[J].振动与冲击,2012,31(15):87-91.
WANG Shuqing, Lin Yuyu, Meng Yuandong,et al. Model order determination based on singular value decomposition[J]. Journal of Vibration and Shock, 2012,31(15):87-91.
[9] 刘宗政, 陈 恳. 基于环境激励的桥梁模态参数识别[J].振动、测试与诊断,2010,30(3):300-303.
LIU Zongzheng, CHEN Ken. Bridge modal parameters identification based on ambient excitation [J]. Journal of Vibration, Measurement & Diagnosis,2010,30(3):300-303.
[10] 陈永高,钟振宇.基于改进EEMD算法的桥梁结构模态参数识别[J].公路交通科技,2018,35(4):49-57.
CHEN Yonggao, ZHONG Zhenyu. Modal parameter identification of bridge structure based on improved EEMD algorithm[J].Journal of Highway and Transportation Research and Development, 2018,35(4): 49-57.
[11] 赵绍东. 分层加权法在桥梁检测评估中的应用[J]. 科技创新与应用,2013,(11):164-165.
ZHAO Shaodong. Application of layered weighting method in bridge inspection and evaluation [J]. Technology Innovation and Application, 2013,(11):164-165.
[12] 荀敬川,贺拴海,高俊亮.基于数据驱动的随机子空間优化算法及应用[J].公路交通科技,2016,33(12):93-100.
XUN Jingchuan, HE Shuanhai, GAO Junliang. An algorithm for stochastic subspace optimization based on data-driven and application[J].Journal of Highway and Transportation Research and Development, 2016,33(12):93-100.
[13] 汤宝平,章国稳,陈 卓. 基于谱系聚类的随机子空间模态参数自动识别[J].振动与冲击,2012 ,31(10):92-96.
TANG Baoping, ZHANG Guowen, CHEN Zhuo. Automatic stochastic subspace identification of modal parameters based on hierarchical clustering method [J].Journal of Vibration and Shock,2012,31(10): 92-96.
[14] 周筱航,单德山,谭康熹,等. 确定子空间识别方法在桥梁振动台模型试验中的对比[J].长安大学学报(自然科学版),2019,39(4):73-81.
猜你喜欢
科学与财富(2017年8期)2017-04-11
科技创新与应用(2017年4期)2017-03-27
科技创新与应用(2017年5期)2017-03-16
企业技术开发·中旬刊(2016年10期)2016-11-12
求知导刊(2016年4期)2016-03-19
湖南大学学报·自然科学版(2015年9期)2016-01-06
湖南大学学报·自然科学版(2015年9期)2016-01-06
科技与创新(2015年13期)2015-07-03
科技与创新(2015年11期)2015-06-16
中国高新技术企业(2015年16期)2015-04-30