涵道除冰无人机系统
2021-09-10 07:29李炳绪李俊东梁萌张贵尧
科学与生活 2021年7期
李炳绪 李俊东 梁萌 张贵尧
摘要:现在我国电网覆盖面积越来越广,电路的安全更加尤为重要,电缆上面覆冰会影响输电线路的安全引发各种事故的。本设计通过对受灾地区结冰条件数据的采集分析,可得出适应不同地域气候的电缆除冰方案。系统主要由除冰作业无人机两组成,除冰作业无人机用来清除电缆覆冰,系统采用激光技术,实用性高。
关键词:涵道无人机、高压线除冰、快速高效
引言
输电线路覆冰和积雪常会引起线路的跳闸、断线、倒杆、绝缘子闪络和通信中断等事故。全国输电线路覆冰引发安全事故,给国家带来了巨大的经济损失。而传统除冰方法效率低下而且危险性十分高。
正文
在电力系统中,输电线路覆冰是严重自然灾害之一. 目前国内外除冰方法有 30 余种根据除冰机理可分为机械除冰法与热力融冰法两类。机械除冰方法能耗较小但是除冰效率低而且一般需要人工参与热力融冰较机械除冰速度快安全性高但实际应用中限制因素太多不能广泛适用。对于较为严重的导线覆冰一般以人工上线除冰最为有效但人工除冰危险性很高且效率较低1。因此我们为此研究了一款新型的除冰机构,可有效清除高压线上积雪薄冰,有效维护电力供应,还可避免人工高危作业,提高救灾抢险效率,提高了高压线除冰效率,真正起到预防灾害的目的。该除冰装置的制造成本低、体积小、可靠性高。
1.除冰无人机结构
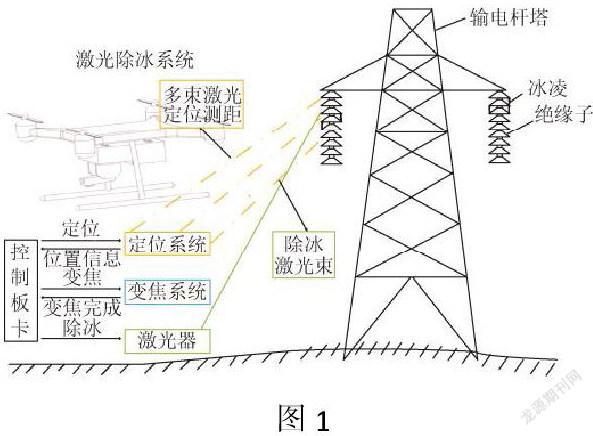
1.1悬垂绝缘子串及其所在的超高压输电线路典型结构如图 1 所示,主要包括输电导线、地线及其金具、直线杆塔、耐张杆塔及其地基,绝缘子串悬挂在直线杆塔的横担上,下端通过与悬垂线夹的联接固定于输电导线之上。绝缘子的主要功能是支持和固定载流导体,在载流导体与地之间形成良好的绝缘。绝缘子不
仅承受机械负荷、导线和金属附件的重量,还必须承受恶劣天气情况下的风载荷、雪载荷、导线舞动以及运输安装过程中所引起的冲击负荷。从电气角度来说,绝缘子不仅要使导线与地绝缘,还必须承受雷电和开关操作引起的过电压冲击,绝缘子上的覆冰和冰凌会增加杆塔负重,绝缘子串片间冰凌是导致片间短路和影响绝缘子电气性能的主要因素。由于絕缘子片间的冰凌呈直线状和柱状,因此,完成作业任务的关键是激光装置对于理想状态为直线状的冰凌的识别与定位,以及激光作用于冰凌上的融冰机理研究。
1.2涵道式无人机,是指以涵道风扇作为飞行动力的主要来源,并将涵道风扇本身作为无人机主体,具有垂直起降和悬停飞行能力的无人飞行器。我们将除冰装置搭载到涵道无人机上方, 同传统的无人机相比,涵道无人机具有以下几个特点:(1)机动性强能独具特色,螺旋桨被涵道筒包裹适于在复杂环境下执行任务。与固定翼无人机相比,涵道式无人机可以在狭小区域内垂直起降,并可以在固定目标上空悬停监视 , 甚至可以降落到高层建筑物上对地面状况进行观察。(2)结构紧凑,推进效率高。同无人直升机相比,在同等功率消耗下,涵道风扇较同直径的孤立 螺旋桨,会产生更大的拉力 ;而且涵道式无人机结构更加紧凑,前飞时飞行阻力小,飞行姿态更接近于固定翼飞机,因此,飞行速度较同级无人直升机高2。
本文以除冰机器人的在线行走与越障为应用背景, 研究利用视觉传感器为主要传感器的视觉控制方法。是利用视觉的无人机控制是通过对视觉信息的分析与处理来感知环境, 并利用视觉信息引导和控制机器人完成给定的任务。
2.除冰热传导模型和作业机理
当激光束照射绝缘子盘面覆冰时,会发生显著的热效应,不同激光器的波长对于冰层融化效果不一样,同时融冰效果还与覆冰厚度成正比关系,因此,对于相同波长激光束照射在不同冰层上,其融冰效果也是不同的。当用较长波长激光照射并扫描绝缘子覆冰时,大部分激光能量都会被覆冰表面所吸收,此时,绝缘子表面温度显著升高,冰融化为水甚至直接气化,如图(a)、(b)。当用较短波长激光照射绝缘子覆冰时,除了表面覆冰吸收激光能量外,冰层内部也可吸收激光能量,因此,覆冰内外冰层形成温差,在内外温差应力超过冰层最大抗压时,绝缘子覆冰会发生断裂或者自动脱落,这种方式下的激光除冰效率更高。不论是绝缘子冰层表面融化,还是内外温差过大产生应力造成的冰块自动炸裂和脱落,其除冰机理都是基于激光热传导模型和能量守恒定律,激光热传导方程可用于绝缘子覆冰周围及内部的温度场分析。
3.测试实验
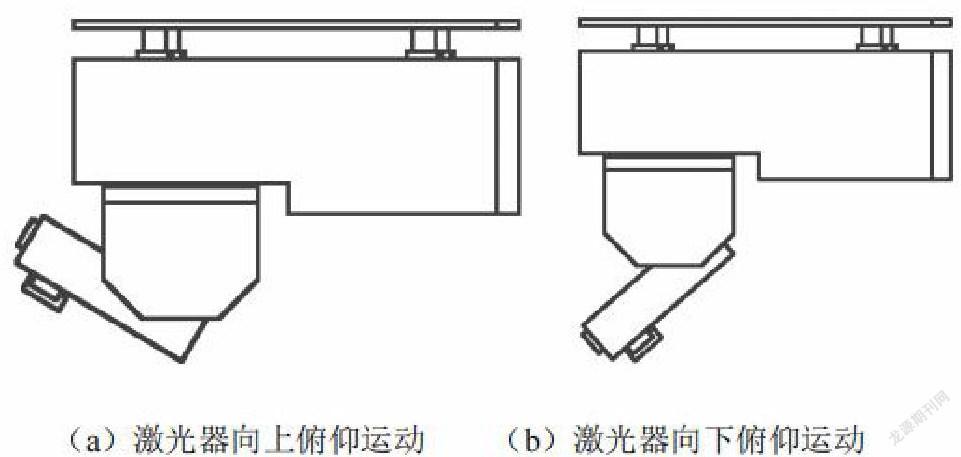
为进一步验证涵道除冰无人机机构构型在绝缘子覆冰清除作业中的可行性和有效性,通过调节激光装备上的两个运动自由度的偏转角 α,β 来测试激光束在绝缘子串上扫描的作业空间范围,以本文作业运动规划中垂直形态下的 5 片悬垂绝缘子构成的 1 个绝缘子串来进行激光扫描作业运动空间范围测试,规定俯仰运动向上俯仰角 α 为正,左右运动向左偏转,偏转角 β 为正,初始位置的两个偏转角都为 0,且激光头正对绝缘子串第3 片中心位置,得到的测试结果。
4.结论
(1)提出了一种基于涵道无人机搭载的输电线路绝缘子除冰机器人基本构型、虚拟样机系统及其与无人机的复合协同运动作业控制方法。
(2)提出了激光除冰的面热源和体热源作用下的激光能量热传导方程,并分别计算了激光作用下的冰层温度场的具体表达式。
(3)提出了一种除冰机无人机的嵌入式集成控制体系架构及其物理实现方法,并通过相关测试实验验证了除冰无人机机构构型及激光除冰的可行性和有效性。
参考文献:
[ 1 ]郑焱月、杨钰、赵英伟、陈燕民、王国庆、刘华. 一种高压线除冰机器人的设计[ J ].科技创业与应用,2018(19):48-50.
[ 2 ] 徐 嘉、范宁军. 涵道无人机研究现状与结构设计[ J ].飞航导弹,200706(205)
山东协和学院 工学院 山东济南 250107