管道机器人的设计和研究
2021-09-10 03:10尚玉坤张思昊张耘皓刘润升李冠岐
客联 2021年5期
尚玉坤 张思昊 张耘皓 刘润升 李冠岐
摘 要:近些年來,随着“西气东输”等国家政策的推广,在我们国家的石油运输的过程中,管道运输成为比较主要的运输工具。我国油气管道的相关技术得到了较快的发展,但是由于近年来对石油各种行业的投资成本的提高,导致油气管道施工技术,管道的成本控制等方面要求提高,难免会出现失误,随着石油输送管线的不断增多,使用年限的不断增加以及打孔盗取原油等因素,输油管道线路泄露导致的事故时常发生,再加上改革开放以来管道的铺设,当时技术也不太成熟,再加上老化、腐蚀等问题,更容易出现泄露所以检测管道泄露,快速补漏技术的重要性显而易见,在石油管道输送的过程中泄漏检测的技术发展显得非常重要。
关键词:管道机器人;管道内部补漏;管道内部运动
一、研究背景
国内的管道检测补漏机器人起步相对较晚,且还具有比较大的局限性。虽然目前所拥有的机器人具有着比较特殊的四边形结构,而且还具有比较强的适应能力,但是还未实现管道内的自我行走、检测与补漏等功能一体化的机器人。仅仅局限在管内行走与检测。对于以钢管和PE管为主要材质的管道来说,如果管道使用过久或者遭到破坏等原因引起管道的泄露则会造成一系列的环境和经济的损失甚至会危害公共安全,且目前市面上并无良好解决方案,因此,比较全面地了解管道内部结构状况,对管道进行结构性、功能性检测,可以及时,准确地为城市规划、设计、施工、抢险以及建设和管理提供决策依据,保证成果质量,以适应现代化城市的建设与发展。运用我们这一款管道检测补漏机器人可以了解探测管道泄漏的发生,并且对管道泄露情况进行补救,对于保护好公共安全,维护环境安全等都具有重要的意义。
二、系统介绍
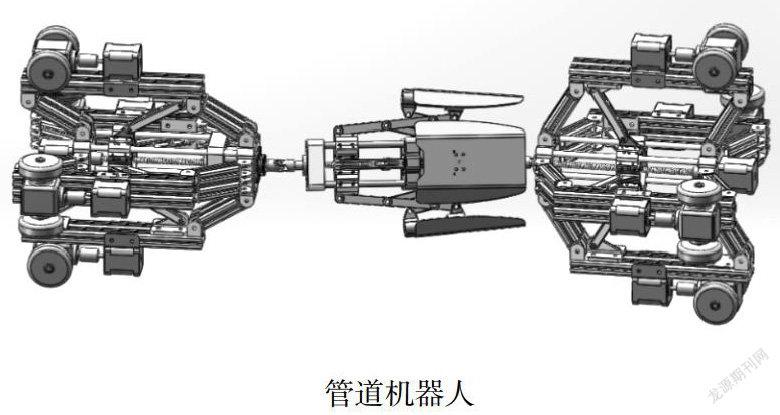
将查阅的资料和将自己的想法系统的归纳后,我们采用伞状器加填塞式补漏的方式组成了管道机器人,既保证了机器人在管道中行走和制动,又不会对石油等能源的运输产生较大影响。此结构主要用于管道的维护与修补,当发现管道泄露的同时我们会将管道机器人放入石油管道内部,通过石油内部流速以及机器人动力系统相配合,寻找到泄漏点并实施补漏,起到减少泄露损失的作用。管道机器人主要分为两个机械部分,两边的伞状器和中间的补漏机构。
根据实际需求计算出管道机器人的移动装置尺寸、伞状器结构尺寸、以及补漏气囊结构大小等一些重要参数。并进行对子装配的模块划分,特别是针对不同机构间组合方式的处理做出了一系列的调整。
对于伞状器结构的设计,我们采用螺旋传动、平行四边形机构和摇杆欢快机构来实现伞状器的伸展和收缩。滑动螺旋传动因为结构简单,装配方便并且利于更换。此装置就是带动各种机构的基础,见其他机构进行连接,联动,以实现各自的功能。滑块运动的同时是摇杆进行摆动使得整个伞状器在管道中支撑,各个运动副为面接触。减少机构在管道中的摩擦,抑制摩擦力产生高温。利用电机来驱动丝杆来完成滑块的上下。遥感滑块机构来实现伞状器的收放,滑块向右将伞状器撑开。平行四边形机构传动时受到单位面积上的压力较小,且有利于润滑,所以磨损较轻,寿命较长。另外由于平行四边形机构接触面多为圆柱面或平面,制造比较简单,易获得较高的精度。我们用此机构作为支撑,完成机器人在管道内部的行走与补漏功能的实现。链接部分我们采用了万向连轴器作为连接,以适应管道的偏移和小角度弯曲,避免管道机器人只能在直线管道行走,适应各类地形管道环境。补漏我们主要是利用滑块机构将气囊装置贴合管壁将气囊撑开以起到填补漏点的作用。
管道机器人的软件控制模块主要用来检测漏点,做出反应填补漏点的,我们视觉采用OV2640模块进行视觉采集,该模块具有200W像素(1632*1232),通信协议采用IIC总线协议通信,通过对外部视觉信息采集后,进行数字化处理,传输到遥控端显示成像。检测我们采用对可燃气体敏感的MQ系列模块进行检测,该模块响应恢复特性快,且使用寿命长,电路驱动简单,使用温度在-10°C-50°C,对管道内气体变化与危险判断起到辅助作用,无线数据的传输将控制数据从控制器装有发送到机器人所装配接受模块上,采用频率为2.4GHz射频收发机,数据传输速率在0-1Mbit/s,可完成无线对机器人上电机进行控制,进行伞状器开合与补漏装置工作,从而完成在外部操控机器人在运动和补漏。程序我们采用keil C51由Keil Software公司推出的兼容单片机C语言的51系列开发系统,且内部包括微控制器开发所有组件如ARM、C编译器、Pack Installeru Vision和调试跟踪器,以及链接器和库管理,可完成编辑、编译、连接、调试与仿真等整个程序开发流程。通过该软件向单片机内烧写程序,完成一系列控制系统的操作从而使机器人完成管道修补等一系列工作的处理。
三、效益分析
国内的管道检测补漏机器人起步相对较晚,且还具有比较大的局限性。虽然目前所拥有的机器人具有着比较特殊的四边形结构,而且还具有比较强的适应能力,但是还未实现管道内的自我行走、检测与辅助修复一体化的功能。仅仅局限在管内行走与检测,所以快速反应及时填补漏点,降低损失是补漏机器所需要具备的功能,设计可以快速反应进行临时堵漏,等待专业人员从外部进行比较严谨的修复,该设计打破了传统的修补方式,减少资源的浪费,减少损失。
四、结语
经过我国对管道运输发展的政策的实施,各大企业的不断研究,管道运输已成为中国继铁路、公路、水路、航空运输之后的第五大运输行业,随着我们国家工业化的加速发展和能源优化的向前推进,我国的油气管道建设正在蓬勃发展,随之而来的补漏工具的更新换代也投入大量的人力物力,我们的产品也将不断更新,围绕管道机器人实现短暂补漏进行的设计,但由于此设计尚在第一代版本。目前还有许多不足与需要改进的地方,还需要进一步的更新。区分模块以实现对不同类型的管道进行补漏,并且不断调试设计我们的产品,做到更多方面的考虑并完善使我们产品做的更好。