散货港口粉尘智能监测与联动控制技术
2021-09-10 15:09庞坤
家园·电力与科技 2021年4期
庞坤

摘要:散货港口粉尘智能监测与联动控制技术,包括“1+N”粉尘智能监测、粉尘精准控制运算模型和粉尘智能化控制系统。通过“1+N”的监测系统实现粉尘全域网格化实时动态监测。粉尘精准控制运算模型是通过大数据统计划定网格区域内加权粉尘浓度,利用高斯扩散模式的反推模式计算得到无组织排放源的源强,根据矩阵模型得到每个网格源强对于检测浓度高值点位的贡献率,对比网格矩阵对该次污染过程的贡献率大小实现高排放的智能识别。粉尘智能控制系统是基于粉尘精准控制运算模型开发出的智能联动控制软件,通过生产指挥中心智能控制堆场喷枪,实现粉尘智能控制,通过监测数据实现粉尘超标预警。
1.前言
交通运输是国民经济的基础设施和基础产业。港口作为世界货物运输的重要枢纽,是世界经济增长的重要推动力。但随着港口的发展,不可避免的带来环境污染问题。如粉尘污染问题已经成为散货港口不可忽视的主要环境问题。
随着我国经济的快速发展,散货港口的装卸品种及吞吐量不断增加,港口散货的扬尘污染日益严重。散货港口粉尘污染已经成为港口城市空气污染的重要来源,颗粒物浓度严重超标,雾霾频发,已经严重影响了港区工作人员及周边住户的健康、工作和生活,散货港口的粉尘污染带来健康损坏、环境破环及作业效率降低等一系列问题。这与2019年中央提出的“坚决打赢三大攻坚战,决胜全面建成小康社会”不符,污染防治攻坚战作为重要一战,重点是打赢蓝天保卫战,要使主要污染物排放总量大幅减少。这就需要散货港口做好粉尘污染防治工作,从源头着手,以防为主,“防”“除”相结合,力争把散货港口的粉尘污染降到最低,建立绿色港口。
《中华人民共和国环境保护税法》的正式实施,要求散货港口按规定按其大气污染物(散货粉尘)排放量进行交税。在该税法第十条中规定“应税大气污染物的排放量的排序第一的计算方法为:纳税人安装使用符合国家规定和监测规范的污染物自动监测设备的,按照污染物自动监测数据计算;”且在第十三条中给出相关的减税政策“纳税人排放应税大气污染物或者水污染物的浓度值低于国家和地方规定的污染物排放标准百分之三十的,减按百分之七十五征收环境保护税。纳税人排放应税大气污染物或者水污染物的浓度值低于国家和地方规定的污染物排放标准百分之五十的,减按百分之五十征收环境保护税。”随着该税法的推行,在国内散货港口掀起了新一轮的粉尘治理技改高潮,港口运营方开始更关注于粉尘污染治理的实效如粉尘污染监测浓度的下降。要严格控制大气污染物的排放,必须要具备有效的监测措施。
散货港口粉尘污染问题自散货港口建立之初就存在,是全球性的问题,国内外研究人员经过长期的不懈努力,对散货港口的粉尘监测技术和除尘技术进行了大量研究,已经有较多方案可供企业选择。然而,我国大部分散货港口的粉尘污染依然严峻,究其原因,主要是现有的粉尘污染监测与控制技术不适用,没有科学完善的粉尘污染监测控制体系,粉尘监测和控制技术和管理还是粗放式和非标准化的,需要人工干预、人力清理的地方非常多,不能满足未来散货港口智能化、无人化的需求,随着国家及人们对环境关注度越来越高,必然对环境质量要求也越来越高。因此,散货港口粉尘智能监测与联动控制技术的研究迫在眉睫。
2.国内外研究现状分析
(1)散货港口粉尘监测国内外研究现状
通常测量的粉尘颗粒浓度分成两种表示方法:数量浓度和质量浓度。数量浓度为单位体积里气溶胶中含有粉尘颗粒的数量。质量浓度为单位体积内的气溶胶中粉尘的质量。到目前为止,人类已经发展出了多种测量粉尘浓度的方法,虽然这些方法各有不同,但从基本原理上来区分,仍然可以将它们归结为两大类:取样法和非取样法。
国外有代表性的产品为英国的Simslin系列监测仪以及其升级产品OSIRIS粉尘传感器和计算机粉尘监测系统;德国丁达尔公司生产的TM系列粉尘仪;俄罗斯研制的π-101型自动测尘仪;日本柴田 LV-5E、P5系列微电脑粉尘仪;美国研制的RAM系列实时粉尘监测仪、粉尘雷达和Auburn公司生产的3400型粉尘监测仪。其中Simslin 系列监测仪、TM系列粉尘仪、LV-5E、P5系列微电脑粉尘仪采用光散射法,π-101型自动测尘仪采用光吸收法,3400型粉尘监测仪采用摩擦电法测量粉尘浓度。国内粉尘浓度监测技术的发展较晚,但最近几年也有所进展:一是逐步向连续监测发展,二是向多点连续监测发展,三是向远距离大面积连续监测发展。
(2)散货港口粉尘控制技术国内外研究现状
近年来,各种智能传感器和物联网的发展为粉尘智能化监测提供了技术条件。基于粉尘监测的控制技术研究和应用成为发展的新趋势。目前一般專业化散货港口的港机作业与作业粉尘控制设备进行了联动控制。以部分港口翻车机翻车作业为例,翻车作业前30秒启动喷雾或喷淋装置,翻车作业完成后30秒停止喷雾或喷淋装置。但基于粉尘浓度监测的港机粉尘控制设备联动的研究和应用还较少,且基本为针对局部作业流程或者单机的控制方面。散货港口产尘点多,涉及静态堆存,动态作业和道路扬尘等,动态作业又包括翻车作业、卸料作业、堆料作业、转运作业和装船作业等多个作业工艺。如果仅针对某个作业环节进行抑尘,往往事倍功半,港区的整体抑尘效果仍然较差,达不到粉尘控制的整体目标。
从粉尘控制手段方面来看,J.Faschingleitner等针对散货固体在输送过程中的扬尘问题,提出了一种封闭的水喷雾系统来抑制最主要和次要的粉尘。王丹等归纳总结了散货堆场防尘措施,该措施又分为湿法、干法、干湿结合、机械物理、生态方法等五种型式,其在分析了国内港口防尘现状的基础上,进一步提出了适宜于散货堆场的抑尘集成技术。Ding等针对煤矿中煤尘的防尘抑尘问题,研究了磁化表面活性剂的除尘性能,对不同浓度表面活性剂的除尘效果进行分析研究。Wang等针对地下煤矿的除尘问题设计了一种新型泡沫发生器除尘系统,并通过实验证明了其有效性。
然而,目前的很多研究多重视单一环节,没有系统研究港口全过程的粉尘综合治理,这种治理离不开各个环节的协同,尤其是粉尘监测和控制两个过程的协同。
因此,本研究正是根据国内外研究的缺失,开展散货港口粉尘智能化监测与控制技术研究,将粉尘监测数据与粉尘控制技术进行关联,实现散货港口粉尘的全区域网格化实时监测、预警和控制,对于散货港口及周边空气环境质量提升,保卫港口城市蓝天白云具有重要意义。
3.散货港口粉尘智能监测与联动控制技术
(1)“1+N”散货港口粉尘智能监测技术
散货港口粉尘实时动态监测要求实时反映港口区域粉尘浓度及其分布情况,因此提出了“1+N”散货港口粉尘智能监测技术。“1+N”技术指的是1套激光雷达粉尘污染物监测设备配合N套场内布设的光散法或β射线法粉尘在线监测仪。其中,1套激光雷達设备通过激光与颗粒物和气态分子相互作用后产生散射光来获取不同高度处污染物的浓度分布信息,再利用N套场内分布的粉尘在线监测仪进行浓度标定。由于激光雷达粉尘污染物监测设备对粉尘的测定是定性/半定量的,因此需要粉尘监测仪进行定点标定。通过“1+N”的组合,可实现实时反映港口区域粉尘浓度及其分布情况的需求。
“1+N”粉尘智能监测方案与港口现有粉尘监测系统相比,其优势在于:可直观实时反映场界内粉尘浓度;可摸清堆场起尘点及起尘规律;可实时反映堆场边界浓度,有效反映是否环保达标排放;还可直观反映是否有场界外粉尘迁移入场,其浓度几何。
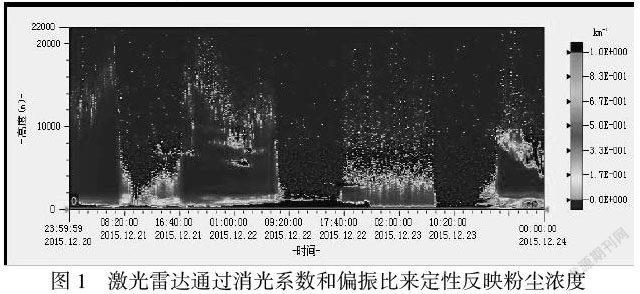
激光雷达粉尘污染源监测技术,简称“粉尘雷达”技术。其监测原理为:“粉尘雷达”如激光探针一样,通过不断向大气中发射激光束,扫描大气中的信息,通过与颗粒物和气态分子相互作用后产生散射光来获取不同高度处污染物的浓度分布信息。该技术无需在堆场内大量布点,港口区只需一台仪器就可满足粉尘监测的全区域覆盖效果,是现有港口粉尘监测技术中最优的选择,相比其他布点监测方案具有巨大的优势。
粉尘雷达与粉尘在线监测仪的“1+N”智能监测技术,是按照如下功能实现的:一、利用颗粒物激光雷达实现对散货港口区域监测扫描的全覆盖;颗粒物激光雷达安装于港区内的制高点,进行定时循环扫描;颗粒物激光雷达扫描后得到覆盖散货港口全域的消光系数;消光系数发送回中心服务器,同样用于对数据的统一处理和分析。二、中心服务器用于接收、处理、分析和存储粉尘浓度数据,并通过显示界面展示散货港口每一个周期的粉尘监测结果。三、设定粉尘在线监测仪的位置具体坐标为(x,y),其任一时刻监测到的粉尘浓度数据为Qt,在同一时刻,通过所述颗粒物激光雷达监测到的,坐标为(x,y)处的消光系数为Et,中心服务器利用以下公式计算得到消光系数和粉尘浓度数据的折算系数αt:中心服务器利用计算得到的折算系数αt乘以该时刻所有位置的消光系数,既可以得到该时刻散货港口全场所有位置的粉尘浓度数据。四、中心服务器将某时刻全场所有位置的粉尘浓度数据加载于散货港口的地图底图之上,得到该时刻该散货港口粉尘浓度分布的云图。
(2)“粉尘浓度-核心影响因素-精准控制决策模型
粉尘监测与智能控制联动的核心是要精准定位起尘区域,污染的源头追踪一直是学术界研究的重点,通过对粉尘污染的溯源,找到真正造成污染的元凶,科学的、有针对性的、有的放矢的从源头来治理粉尘污染。现阶段主要的细颗粒物的溯源方法主要有三种方法,其中包括源排放清单法、受体模型法和扩散模型法。
源排放清单法,顾名思义就是要获取到监测区域所有污染源的排放数据。整个方法结果简单明了,但主要问题在污染源清单的获取和数据库的创建中,由于监测区域空气污染物的开放性,使得前期排放清单的获取难度过大,数据不够完全(外来污染物的扩散),另外由于活动水平资料的不全面,排放因子难以确定,使得准确的数据库创建难度过大。
受体模型法主要应用监测点的监测信息,通过物理化学计算模型反推出细颗粒物的主要来源。受体模型法是应用较早的源分析方法,而且是现阶段国内外在科学研究方面应用较多的分析方法。但受体模型方法并不适用于快速溯源过程。
扩散模型法,是基于监测数据与气象学空气模型把污染物在空气中的扩散,物理化学变化通过数学模型的方式创建出来,通过监测点的贡献值大小来判断主要污染源。首先扩散模型法不仅可以获取到监测点位的污染源解析情况,并且可以获取到整个监测范围内的污染物扩散情况。第二方面,由于还原了整个监测空间污染物的扩散过程,所以对分辨出本地和外来污染源。第三方面,通过还原出的扩散模型对粉尘污染控制具有指导意义。
利用扩散模型法开展起尘点溯源的计算过程中,前提假设是:每个网格内的面源污染都可被视为中心点源,利用高斯扩散模式的反推模式可计算得到无组织排放源的源强Q,根据矩阵模型得到每个网格源强对于检测浓度高值点位的贡献率aij,对比网格矩阵对该次污染过程的贡献率aij大小;设定贡献率阈值,aij超过的阈值网格启动喷枪,实现网格化精准控制。而网格化划分的过程主要包括:将每个喷枪的控制区域范围,其落入网格中,根据喷淋的控制区域范围,划分监测系统的监测网格片区,粉尘雷达设定为对每个监测网格进行监测,智能统计每个网格区域内加权粉尘浓度,根据网格区的平均粉尘浓度分布情况结合气象数据,根据相应的底层算法得到粉尘控制决策依据。
(3)粉尘智能监测与联动控制系统平台
系统架构主要由三部分内容组成:粉尘智能化监测、粉尘精准控制运算模型和粉尘智能控制系统。
一、粉尘智能化监测是通过“1+N”的监测系统实现,其中激光雷达粉尘监测系统用于区域监测,粉尘在线监测仪用于场界监测和场内分散点位监测。粉尘在线监测仪共用于激光雷达的定量化标定。此套监测系统能够实现港口区域监测的全覆盖效果。
二、粉尘精准控制运算模型是通过智能统计划定网格区域内加权粉尘浓度,利用高斯扩散模式的反推模式计算得到无组织排放源的源强,根据矩阵模型得到每个网格源强对于检测浓度高值点位的贡献率,对比网格矩阵对该次污染过程的贡献率大小实现高排放的智能识别。
三、粉尘智能控制系统是基于粉尘精准控制运算模型开发出的智能联动控制软件,可联动二级泵房、控制泵房,通过生产调水中心智能控制堆场喷枪,实现粉尘智能控制,通过监测数据实现粉尘超标预警。
4.结论
粉尘智能监测和联动控制技术及其系统,其监测范围可实现散货码头区域全覆盖,监测指标为TSP、PM10和PM2.5,监测系统能实时反映码头区域粉尘浓度分布情况。系统可实现监测与控制联动,能结合气象参数、粉尘浓度和地理位置信息智能判断堆场内起尘位置,能根据判断出的起尘位置自动启动相关区域喷淋设施,可根据堆场不同作业情况智能控制喷淋设施,可根据气象、环境等因素做出算法修正。通过软件平台可实时查询码头各位置粉尘浓度分布,并可对粉尘浓度即将超标区域进行浓度预警。
系统可保证码头粉尘防治的全面性和整体性;提高环境效果,提高环保效率,减轻工人劳动强度;在有效除尘的同时,使水资源利用率达到最大化,节约抑尘用水。
参考文献:
[1]吴维平.中国沿海港口粉尘污染的防治现状与对策[J].交通环保,2003,22(4):380-384.
[2]V. C. Gungor and G. P. Hancke,IEEE Trans. Ind. Electron.,56,p. 4258–4265 2009.
[3]A. Kumar,V. Srivastava,M. K. Singh,and G. P. Hancke,IEEE Sensors J.15,p. 2505–2513 2015.
[4]王皓,林海燕,贾鹏飞,卢肖萌.基于环境监测的煤炭堆场智能化洒水系统研究[J].煤炭工程,2017,(09):46-49.
[5]黎胜龙,黄强,叶海南.智能控制喷雾除尘技术研究及应用[J].煤炭技术,2017,(12):116-118.
[6]唐娟.粉尘浓度在线监测技术的现状及发展趋势[J]. 矿业安全与环保2009,36(5)69-74.
[7]雷志伟.激光消光法粉尘浓度在线测量系统的研发[D].东南大学,2015.
[8]彭世涛,白景峰,戴明新,井亮.煤炭堆场智能洒水决策系统的运行方法ZL.201110196616.7 [P].
国能(天津)港務有限责任公司
猜你喜欢
中小企业管理与科技·中旬刊(2021年2期)2021-03-02
科学与信息化(2020年7期)2020-07-10
科技视界(2019年18期)2019-08-07
物联网技术(2018年8期)2018-12-06
珠江水运(2017年23期)2018-01-07
科技创新导报(2017年10期)2017-06-19
家教世界·创新阅读(2016年12期)2017-01-09
劳动保护(2016年9期)2016-11-12