基于不同车速条件下的换道预警方法研究
2021-09-10 07:22贺晓宇陈丽洁杨梅
交通科技与管理 2021年16期
贺晓宇 陈丽洁 杨梅


摘 要:统计结果表明,车辆换道导致的交通事故数量约占事故总数的27%,其中紧急换道行为是主要的诱因,它导致的交通堵塞时间占到全部碰撞事故交通延迟的10%。而在行车过程中,换道行为是不可避免并且频繁发生的,因此驾驶员提供换道危险预警,可以降低事故发生的概率。而车辆在行驶中,驾驶员用来做决策的时间是非常短的,因此对换道预警模型的实时性有极高的要求。为达到提高预警模型灵活性的目的,本文提出了一种实时动态的安全换道可行区域模型,无论驾驶员以何种方式换道,只需检测车辆的实时位置是否在安全区域内即可。其中换道轨迹分为最慢换道轨迹、最快换道轨迹。用七次多项式规划换道轨迹,其中由最大曲率确定最快换道轨迹,由安全碰撞时间确定最慢换道轨迹。识别出换道行为后,在车辆行驶中,模型会根据自车车速和其他车相对自车所在的位置,划分出不同的安全范围,当自车不在安全范围内则模型预警。
关键词:换道;换道轨迹;动态安全可行区域
1 车辆换道轨迹
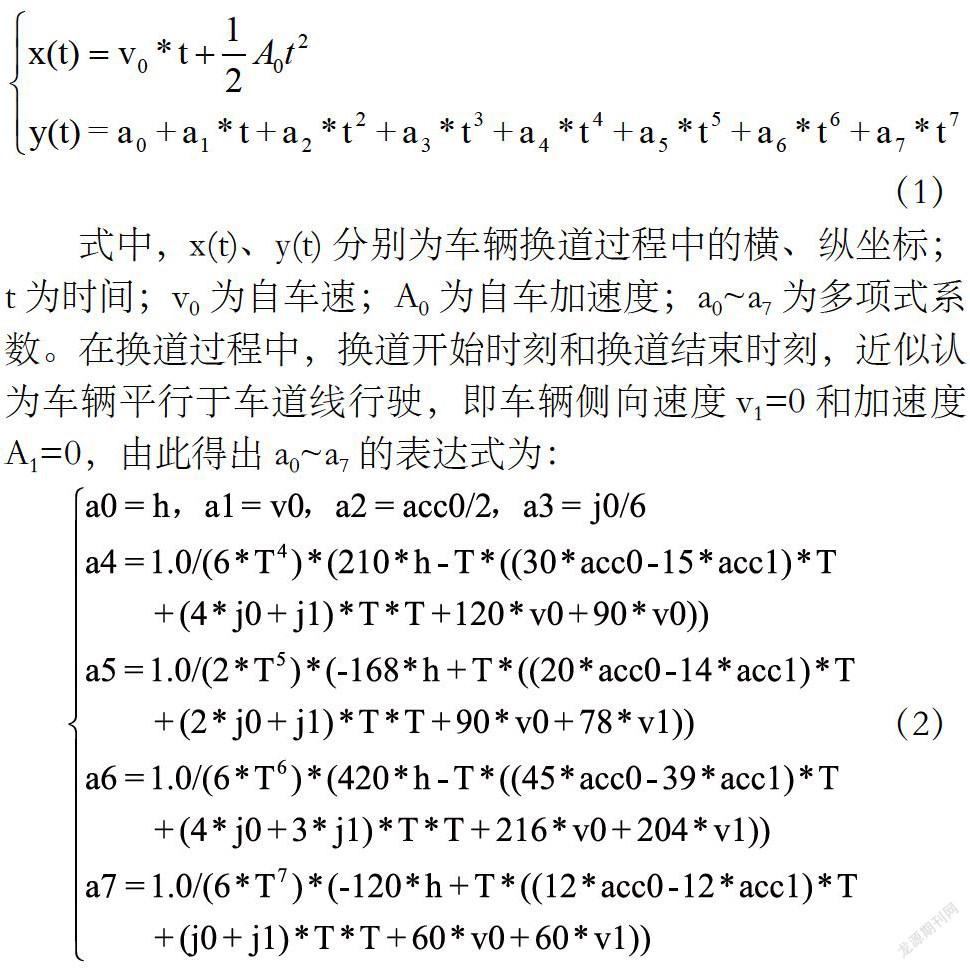
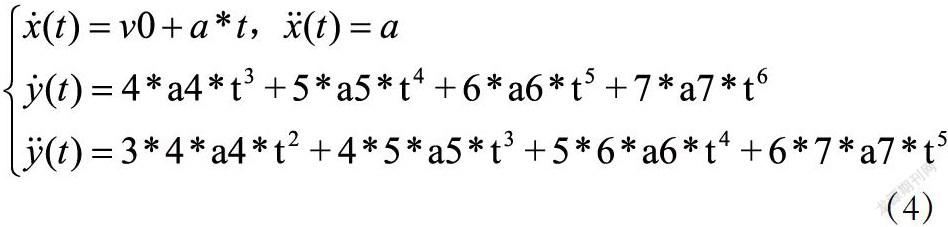
国内外研究人员提出了很多的换道轨迹模型,换道轨迹模型反应着车辆的操纵稳定性和行驶安全性[1],Eshelman提出了7次多项式换道轨迹,Fett提出了圆弧轨迹模型[2],Limpert提出了正弦曲线模型[3],裴玉龙提出了β样条曲线[4],徐慧智提出了缓和曲线[5],Kanayama提出了螺旋线模型。参考前人的研究,本文选择含有8个参数的七次多项式和直线运动方程公式,分别描述侧向轨迹和纵向轨迹,车辆换道轨迹函数可表示为:
式中,x(t)、y(t)分别为车辆换道过程中的横、纵坐标;t为时间;v0为自车速;A0为自车加速度;a0~a7为多项式系数。在换道过程中,换道开始时刻和换道结束时刻,近似认为车辆平行于车道线行驶,即车辆侧向速度v1=0和加速度A1=0,由此得出a0~a7的表达式为:
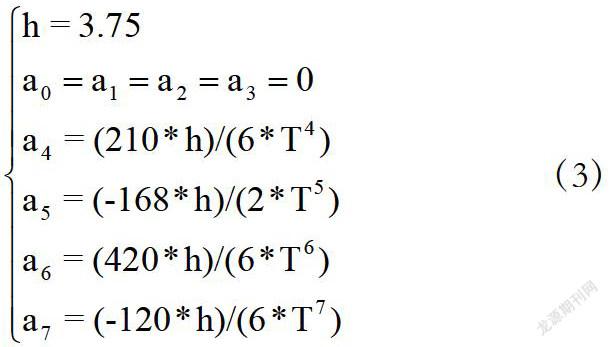
式(2)中,h为换道初始时刻自车和目标车横向相对距离,按照我国的公路建设行业标准,取道路宽度h为3.75 m。v0为换道初始时刻横向速度,acc0为换道初始时刻横向加速度,j0为换道初始时刻横向加速度;v1为换道结束时刻横向速度,acc1为换道结束时刻横向加速度,j1为换道结束时刻横向加速度,T为总换道时间。式(2)化简得:
2 安全指标
2.1 纵向安全指标
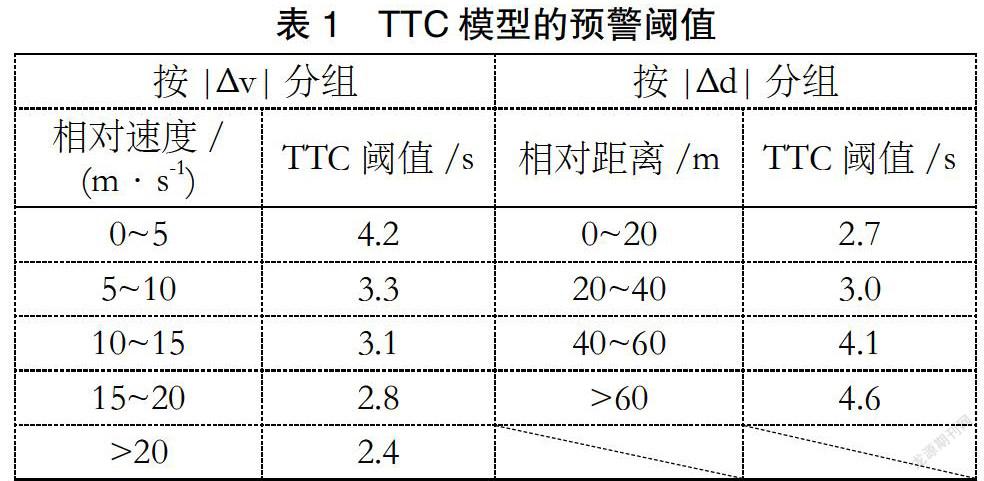
本模型以碰撞时间(TTC)作为纵向安全评价指标,参考文献[6]实验心理学中的SDT分析方法确定预警模型。对于自车和目标车的相对速度Δv、相对距离Δd,分别采用不同的TTC预警阈值。采集自车和目标之间的状态,根据表1选择数值大的作为预警阈值。
2.2 盲区预警
参考国际标准ISO 17387-2008中的C型系统,对于自车周围3 m内的目标盲区预警。
2.3 横向安全指标
横向极限状态发生在:自车可以追上自车道前车时、自车可以换道至目标车道前车前方时、自车可以换道至目标车道后车后方时三种情况。当自车和目标车在纵向上达到TTC阈值时,令此时自车和目标车的横向距离为0。将从换道行为开始到两车横向距离为0所需的时间t,以及自车横向移动的距离,带入七次多项式轨迹方程,可求得总换道时间,将其带入y(x)中即可得到轨迹。simulink中s文件代码如下:
3 极限路径
3.1 最快换道路径
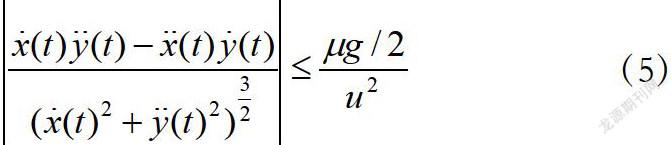
在目标车道后车距离允许的情况下,以时间最短的方式完成换道。考虑到换道车辆的动力学约束,在行驶途中若快速转动方向盘有可能会造成车辆发生侧滑甚至是失控。所以要保证换道轨迹曲率在合适的范围内,以不发生车辆侧滑為最极限标准。而轨迹曲率最大的地方是最容易发生侧滑的,所以只要令此时的曲率[7]小于此刻使车辆发生侧滑的最小侧向加速度[8]。式(5)中,μ为轮胎与地面之间的摩擦系数;u为自车实时车速。
3.2 最慢换道路径
因要求预警模型具有灵活、安全性,所以在换道过程中,极限换道边界轨迹随自车和目标车运动状态的变化而变化。
在换道过程中,采集到的实时自车与目标车之间的碰撞时间,与已经进行换道行为的时间相加,再减去所对应的TTC安全阈值后的,即得到最慢换道所需的换道时间。带入y(x)即可规划出最慢换道路径。
4 换道场景
自车和目标车之间能否可以追上或被追上,可用判定公式来判断:
对于自车和目标车道前车,Δ>=0,则自车可以追的上,否则追不上;对于自车和目标车道后车,Δ>=0,则后车可以追的上自车,否则追不上。其中v0为自车车速,a0为自车加速度,v1为目标车车速,a1为目标车加速度,|Δd|为两车纵向距离。
4.1 自车与目标车道前车
(1)自车追不上目标车道前车:目标车道前车对于自车没有威胁,只要在最快换道左侧,即不发生侧滑就为安全;
(2)自车可以追上目标车道前车,但超不过前车:若保持直线行驶不换道(后同),自车车头将会两次触及安全阈值界限,在第一次触及之前和第二次触及之后,才可以进行安全换道(图1);
(3)自车可以超过目标车道前车:自车达到目标车道前车后方的安全阈值界限前,和达到目标车道前车前方的阈值后,为可以安全换道的区域(图2)。
4.2 自车与目标车道后车
(1)目标车道后车追不上自车,自车对目标车道后车不造成威胁,即只要自车不发生侧滑即可;
(2)目标车道后车可以追上自车,但超不过自车:目标车道后车车头将会两次触及安全阈值界限,所以在第一次触及之前和第二次触及之后,才可以进行安全换道(图3);
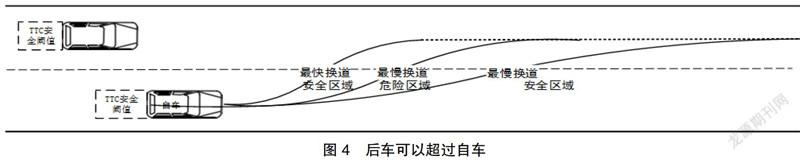
(3)目标车道后车可以超过自车,目标车道后车车头将会两次触及安全阈值界限,所以在第一次触及之前和第二次触及之后,才可以进行安全换道(图4)。
4.3 自车与自车道前车
自车与自车道前车只要保持在自车与前车在纵向上恰好没有重叠时,两车的横向距离为零即可。本模型目前只考虑换道过程中的安全性,不考虑前车与自车的紧急避撞情况。
5 结语
通过本文提出的一种实时动态的安全换道可行区域模型,在车辆行驶中,模型根据自车车速和其他车相对自车所在的位置,划分出不同的安全范围,当自车的所处的位置不满足任一安全范围时,模型预警,确保通行安全。
参考文献:
[1]肖献强,王其东,潘盛辉.基于视觉及TLC概念的车辆跑偏检测方法研究[J].汽车工程,2010,32(1):77-80.
[2]Nelson W.Continuous-curvature Path for Autonomous Vehicles[C].IEEE International Conference on Robotics and Automation,1989:1260-1264.
[3]裴玉龙,张银.车道变换期望运行轨迹仿真[J].交通与计算机,2008,26(4):68-71.
[4]徐慧智,裴玉龙,程国柱.基于期望运行轨迹的车道变换行为安全性分析[J].中国安全科学学报,2010(1):90-95.
[5]李传友.高速公路环境下智能车辆自动换道研究[D].长安大学,2019.
[6]王畅,付锐,张琼,等.换道预警系统中参数TTC特性探究[J].中国公路学报,2015,28(8):91-100.
[7]张新峰.基于稳态转向特性的智能车辆换道轨迹规划[D].长安大学,2018.
[8]李传友.高速公路环境下智能车辆自动换道研究[D].长安大学,2016.