
运用最大熵高斯模糊聚类算法跟踪定位多点弱小运动目标
2021-09-10 07:22廉兴科
科技研究 2021年13期
廉兴科


摘要:通过恒虚警概率准则检测出目标的初始状态,并以其为中心开窗,把所有跟踪窗内的的观测数据融合到一个观测矩阵中,然后利用修正的最大熵高斯模糊聚类算法得到的隶属度来代替关联概率,通过kalman滤波器更新目标状态。本算法针对观测的不确定性给出新的权值分配方案,并基于差异因子定义了最大有效距离,剔除了无效观测数据,避免了传统跟踪算法中目标密集时产生误跟或跟丢等现象,减少计算量并且确保了跟踪精度。
关键词:观测矩阵,最大熵高斯模糊聚类,kalman滤波器,差异因子,无效观测
1引言
运动目标的跟踪是计算机视觉领域中备受关注的前沿方向,在交通监控,医学研究,客流量统计,轮船导航,军事指挥等领域有着广泛的应用。而在交通监控或客流量统计领域背景较小时研究对象是车辆或行人等大目标,有纹理信息可以利用,然而当背景变成天空或海面时,目标可以视为点目标,而且信躁比也很低,在跟踪上就变得复杂多了。1975年Bar-Shalom和Tse提出了适用于杂波环境中的单目标的跟踪算法概率数据关联(PDA),随后也出现了很多改进的PDA算法;在单目标跟踪的PDA算法基础上Bar-Shalom等人又提出了适用于多目标情形的联合概率数据关联(JPDA)算法[1]。鉴于JPDA在计算量上会随杂波密度的增加出现组合爆炸现象,随后出现了很多针对各种实际应用的改进算法,然而这些算法在降低了计算量的同时也降低了算法的有效性和可靠性。
Zadeh于1965年提出了著名的模糊集理论创建了模糊数学这一新科学,将模糊技术应用于不同的领域便产生了不同的模糊系统。由于目标的下一时刻运动的随机性,使运动的变化区域不确定而具有模糊性,因此我们可以考虑把下一时刻检测到的所有量测都分别跟每一个目标进行模糊概率关联。本文提出了一种应用于红外背景下的多点弱小目标跟踪的最大墒高斯聚类模糊算法,既可以在目标相距较远时进行准确地实时跟踪,又可以在目标密集时进行较好的航迹分离,克服了传统算法上目标密集时计算量大和目标容易误跟或跟丢等缺陷。
2微弱点状运动目标的检测
由于微弱点状目标的信噪比较低,使得在单帧图像上几乎不可能检测出目标,或即使检测出目标也常常伴随着大量的假目标,因此,目前的检测技術多采用多帧检测技术。多帧检测技术分为两大类,一类为先检测后跟踪技术(Detection-Before-Track),另一类为先跟踪后检测技术(Track-Before-Detection)。前者对单帧图像进行阈值判别,然后在分割后的二值化图像序列中寻找可能的目标轨迹,这种方法的计算相对简单,但要求一个高的信噪比环境。而后者通过累积目标的所有可能的运动轨迹的亮度值,判别各条轨迹的后验概率,从而检测出真实的目标运行轨迹。对于微弱点状运动目标的检测,通常采用将图像序列里连续的几帧在时域上进行合并即将三维图像(二维空间,一维时间)合并成二维空间得到组合帧,然后采用先跟踪后检测(TBD)方法检测出所有目标的初始状态[2]。
3多目标高斯最大熵模糊聚类跟踪算法
3.1聚类中心和观测数据的确定
从多帧图像序列中检测到的目标初始状态并得到目标个数c,既确定下了聚类中心C{cj,j=1,2,…,c},分别以检测到的类中心位置为中心开一N×N大小的跟踪窗,然后在每个跟踪窗里分别进行量测的检测,然后把所有跟踪窗内检测到的量测融合在一个量测矩阵Z中,融合规则:先把每个量测矩阵Zi(i=1,2,…,c)里面的量测都放在一个总的量测矩阵Z中,然后再在Z中把重合的量测点去掉,并记下最后量测点的数目m,既确定了观测数据矩阵Z{zi,i=1,2,…,m}。这样比把所有的量测矩阵两两进行比较删除重合量测再融合到一个量测矩阵中的规则要大大减少计算量。
3.2最大熵高斯模糊聚类算法
6实验结果和分析
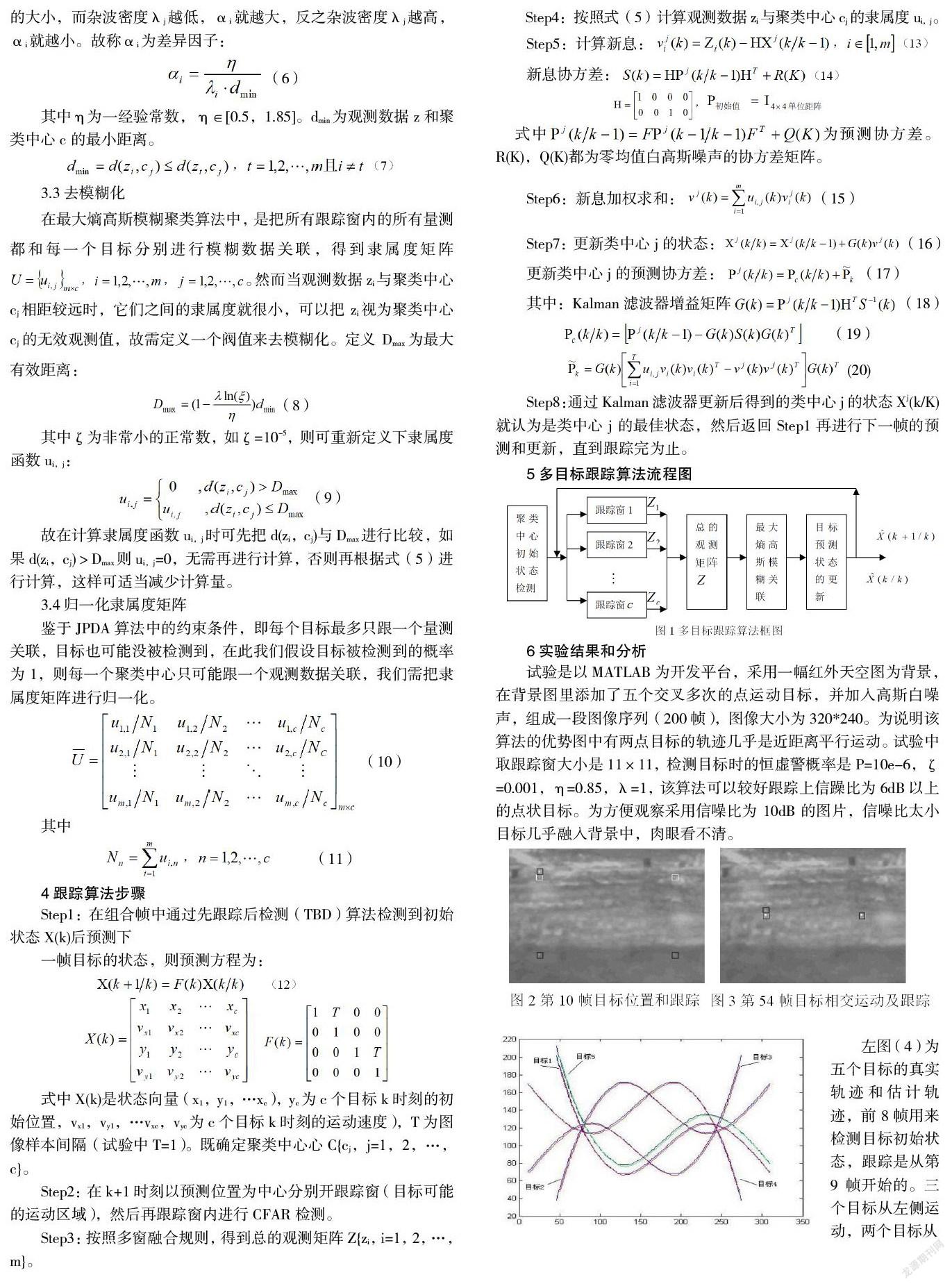
试验是以MATLAB为开发平台,采用一幅红外天空图为背景,在背景图里添加了五个交叉多次的点运动目标,并加入高斯白噪声,组成一段图像序列(200帧),图像大小为320*240。为说明该算法的优势图中有两点目标的轨迹几乎是近距离平行运动。试验中取跟踪窗大小是11×11,检测目标时的恒虚警概率是P=10e-6,ζ=0.001,η=0.85,λ=1,该算法可以较好跟踪上信躁比为6dB以上的点状目标。为方便观察采用信噪比为10dB的图片,信噪比太小目标几乎融入背景中,肉眼看不清。
左图(4)为五个目标的真实轨迹和估计轨迹,前8帧用来检测目标初始状态,跟踪是从第9帧开始的。三个目标从左侧运动,两个目标从右侧运动,五个目标多次交叉运动,其中有两个目标整个运动过程相距较近,几乎平行运动。传统的JPDA算法无法准确的跟踪下来。在杂波密度λ=1时,对于JPDAF不仅无法正确地分离两个平行运动目标的航迹,而且在目标相距较近时产生两个跟踪窗同时跟踪在一个目标上,即产生跟丢和误跟现象,当杂波密度增大时,JPDA算法出现可行联合矩阵的爆炸增加现象,考虑了过多的无用解导致算法性能下降,很多目标都跟丢。传统的模糊算法在计算聚类中心时都是要进行不停的循环,当前后两次的代价函数差值小于一个非常小的数时或者大于最大循环次数便跳出循环得到最优聚类中心,而在该算法中,计算出隶属度函数后便通过kalman滤波器进行类状态更新便作为最优聚类中心,而且引入了最大有效距离作为第二门限,能够有效地剔除无效观测值,减少了计算量并且确保了跟踪精度。
下面把目标1和目标5的跟踪坐标和实际坐标的部分绝对差(单位:像素)列出,如下表:
由上表可以看出在跟踪过程中两目标的估计坐标和实际坐标差值在1个像素左右,具有很高的跟踪精度。
7结论
本文对杂波环境下的实时多目标跟踪技术作了深入研究,提出了一种适用于红外背景下微弱多点状目标最大熵高斯模糊聚类跟踪算法。利用修正的最大熵模糊聚类得到的隶属度来代替目标的关联概率,通过kalman滤波器更新类状态,本算法针对观测的不确定性给出新的权值分配方案,并基于差异因子定义了最大有效距离,剔除了无效观测数据,减少计算量并且确保了跟踪精度。
参考文献:
[1]韩崇昭,朱洪艳等,多源信息融合[M],清华大学出版社,2006.291-302.
[2]艾斯卡尔,陈颖.基于概率加权求和投影的多维信号检测技术研究.电子学报[J].2005,33(7).
[3]KirubarajanT,Bar-ShalomY. Probabil isticdata association techni quesfortargettrackinginclutter[C]. Proc.ofIEEE,2004,92(3):536-556.
[4]Escamilla-AmbrosioPJ,NeilM. Hybird Kalmanfilter- fuzzylogicad aptivemultisensordata fusionarchitectures[C]. 42nd,IEEEConferenceon Decisionand Control,2003,5:5215-5220.
[5]谭扬波,陈光橘.一种基于最大模糊熵的高斯聚类算法[J].电子科技大学学报,2000,29(3):269-272.
[6]李良群,姬红兵.基于最大熵模糊聚类的快速数据关联算法,西安电子科技大学学报,Apr,2006,33(2):251-256.
