
基于自动控制技术的仿生无人化苹果收集机器人设计
2021-09-13 04:32李龙黄宇珩李毓雯
无线互联科技 2021年11期
关键词:结构设计
李龙 黄宇珩 李毓雯

摘 要:针对落地苹果收集过程中的费时、费力等问题,文章基于自动控制技术,设计了一款仿生无人化苹果收集机器人。详细阐述苹果自动收集机器人的结构特点和工作原理,并利用结构和数据方面进行推导,分析整个装置的可行性。与传统的收集果实方式相比较,仿生无人化苹果收集机器人不仅能够适应多种场合的复杂地形,还可以自动收集在地上散落的果实,将收集过程中对果实的损害降到最低,更有利于提高果农的效益,促进社会生产力的发展。
关键词:苹果收集;结构设计;仿生及自动化
0 引言
苹果中含有丰富的碳水化合物、维生素和微量元素,它不仅可以直接食用,还可以收集制作苹果味饮料,使人们得到味觉上的享受。就2020年度而言,我国的苹果种植面积仍在不断增加,新的种植技术也在不断推广。引进新的栽培技术之后,国内苹果的产量不断上升,因此,需要不断更新苹果收集技术,提高生产效率,而使用仿生化苹果收集机器人可以大大减少果园人工的成本,促进种植业的发展。
在整个果实的生产过程中,果实的收集非常耗费时间和成本,苹果在收获期间需要投入的劳动力几乎占了整个种植过程的一半,落地的苹果更是增加了收集的难度。另外,果实受到了时效性的限制,如若不及时收集,就会发生溃烂,导致收益减少。目前,国外很多果园的自动化设备已经实现了很多功能,大多将采摘与收集结合,做成一体式设备,这类机器效率较高,但体型大,价格昂贵,使用技术要求较高。我国的农林果树地形地势复杂,大型机械并不适合我国的作业条件。因此,研制一种功能完善、可靠性高、成本低的苹果收集机器人不仅能减轻劳动强度,提高成本,还能在一定程度上促进苹果产业发展。
1 结构及工作原理
1.1 仿生无人化苹果收集机器人整体结构
仿生无人化苹果收集机器人整体三维模型如图1所示。将左右的保护挡板拆下以后可以明显看出,仿生无人化苹果收集机器人主要由传动板、圆形轮、支撑体、回旋挡板、控制把手、内箱体、左右保护挡板组成。
传动板在支撑体边缘传送带的作用下按照特定的方向和速度转动,达到收集苹果的目的;回旋挡板可以给苹果提供向上的分力,左右保护挡板可以防止果实在运输过程中掉落;内箱体可以将运输的果实储存起来;控制把手可以人为干预调整机器人的方向;圆形轮用来承载重量,同时与电机相连接,提供动力。
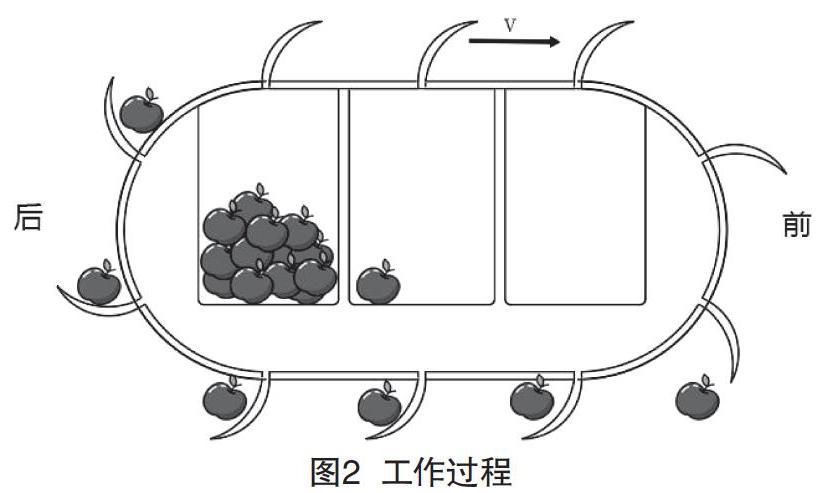
1.2 仿生无人化苹果收集机器人工图作原理
苹果收集器的工作过程可以用图2进行表示。收集前,小车在控制系统或人工的作用下行至至果园处;收集时,小车向前运动,地面上的苹果从小车的前端进入,支撑体履带上的挡板与苹果相对静止或速度比苹果略快。首先,苹果随着传动板一起水平运动。然后,再回旋挡板的作用下随传动板向上运动,直到传动板运动至箱体上方开口入。最后,果实落入内箱体中,完成苹果的收集作业。该装置能满不同道路,多种大小的苹果收集作业。
2 可行性分析
2.1 数值分析推导可行性
假设某地一个果园占有1 000亩地:一亩约等于667 m2,按照行距2×4 m,亩载83株果树。
在现有技术水平和管理条件下,五年生苹果树的树体指标为距地20 cm处的千周25 cm左右,单株枝量1 000个上下,树株整齐度90%以上,亩枝量10万,树冠投影覆盖率75%。在此基础条件下,掌握以下栽培要点,亩产可望达到 1 500 kg。以下效益按照亩产1 000 kg计算。
采用传统的人工收集苹果,每亩2 000斤(1 kg=2斤)可由4位收集工人一天完成,1 000亩地需要4 000人才能完成,按照市场价格每个工人100元/天,一共需要40万元的雇佣成本费用。但是采用仿生无人化苹果收集机器人收集苹果,一亩可由一个人来完成,只需要1 000人,一共需要10万元的雇佣成本。
综上两种情况比较,在设定的情况下使用仿生无人化苹果收集机器人可以减少3/4的成本,长期使用可以大幅度增加经济效益,给果农带来了巨大的福利。
2.2 理论推导可行性
2.2.1 装置特点
(1)结构方面:仿生无人化苹果收集机器人,采用电机驱动,而且符合机械原理的设计要求,既省力又稳定。
(2)经济方面:该机械各个部件生产成本低,适用于拥有中等或大型果园的果农,经济要求可以被大多数使用者所接受。机器人适用于所有类型的果园,可以用来收集大部分果实。在其他农业场合甚至其他领域也可以使用。
(3)市场方面:由于劳动力的紧缺,劳动力昂贵,果农迫切需要这种全自动化机器来代替手工,减轻成本,从而获得更多的经济效益。
2.2.2 装置优势
(1)使用仿生无人化苹果收集机器人自动收集果实,能够大大缩短劳动时间,提高生产效率。
(2)仿生无人化苹果收集机器人能够代替人力实现收集,大幅度减少果农的雇佣成本,鼓励更多的人投身于农业种植行业,增大竞争力。
(3)仿生无人化苹果收集机器人顺应当今农业机械自动化潮流,推进果实自动化收集产业的发展和进步,推进农业自动化发展。
3 结语
仿生无人化苹果收集机器人在尽可能减少人工操作的基础上,采用机电一体化的技术实现收集智能化,造价中等,适用于各种果园。同时,可以大幅提高收集效率并将果实收集中的损害降到最低,在提高果实收集效率的同时为果农减少雇佣成本,符合当代农业的需要。理论分析表明,该采摘器的结构合理,强度满足要求,经试验检验采摘效率也明显高于人工采摘,对水果种植业发展起到积极作用,所以该装置具有良好的应用前景和推广价值。
[参考文献]
[1]刘志宇,张亮,李树珍,石磊,任晓光.采摘机器人的研究现状和发展趋势[J].现代化农业,2021(1):64-66.
[2]左斌,張永康,郭南初.多功能苹果采摘包装机的设计与仿真[J].实验室研究与探索,2020(9):108-113.
[3]张宸赫.一种苹果采摘机的设计与研究[D].成都:成都大学,2020.
[4]谭涛.蔬果采摘机器人的研究进展与展望[J].现代农业研究,2020(5):68-69.
[5]杜枭雄.苹果采摘机器人视觉系统的目标识别研究[D].汉中:陕西理工大学,2019.
(编辑 姚 鑫)
猜你喜欢
防爆电机(2020年4期)2020-12-14
中国核电(2017年1期)2017-05-17
电子制作(2016年1期)2016-11-07
专用汽车(2016年5期)2016-03-01
专用汽车(2016年5期)2016-03-01
中国房地产业(2016年2期)2016-03-01
中国房地产业(2016年24期)2016-02-16
专用汽车(2015年2期)2015-03-01
