
基于神经网络优化算法的分数阶PIλDμ控制
2021-09-15 07:47谢玲玲
南京理工大学学报 2021年4期
谢玲玲,秦 龙
(广西大学 电气工程学院,广西 南宁 530004)
随着科技水平的不断提高,对控制器性能精度和智能化的要求越来越高。传统的整数阶PID控制器结构简单,易于操作,但参数选择的局限性,导致其稳定范围小,控制系统性能不高。相比于整数阶PID控制器,分数阶PIλDμ控制器的控制范围更大、控制效果更好[1]。
分数阶PIλDμ控制器具有5个控制参数,扩大了参数整定的范围,可以更方便地控制被控对象,具有更好的控制效果[2]。为了更好地优化分数阶PIλDμ控制器参数,国内外学者将智能算法引入分数阶参数整定过程中[3]。文献[4]在解决生物地理学算法收敛不精确的问题时引入了一种改进生物地理学优化算法,加快了寻优速度。文献[5]将改进的粒子群优化算法应用到分数阶PIλDμ控制器复合的控制算法中,使系统的抗干扰能力加强。文献[6]提出了将改进状态空间模型算法与分数阶PID控制器相结合的优化方法,使系统具有更好的时域响应性能。文献[7]在分数阶PIλDμ控制器设计中引入人工蜂群的智能优化算法,简化了控制器的结构,但该算法较易陷入局部最优的问题。
为了使系统可以更好地被控制,科研工作者将大量的人工智能算法与传统的PID控制结合起来。其中,人工神经网络是一种以人脑基本特性为基础的控制算法,具有很强的自学习能力和快速寻优等特点[8]。为解决分数阶PIλDμ控制器难以整定的难题,本文提出了一种基于误差反向传播(Back propagation,BP)神经网络算法与分数阶PIλDμ控制器相结合的方法。首先,将分数阶PIλDμ控制器数字化,然后通过BP神经网络算法调节突触权值,经调整后输出量作为分数阶PIλDμ控制器的参数值,最终实现了一种BP神经网络分数阶PIλDμ控制器的设计。对分数阶被控系统和整数阶被控系统进行对比实验仿真,期望可以验证本文设计的控制器具有有效性。
1 分数阶PIλDμ控制器
分数阶PIλDμ控制器的结构框图如图1所示。图中,R(s)为系统的输入,Y(s)为系统输出,Kp为比例系数,Ki为积分系数,Kd为微分系数,λ为积分阶次,μ为微分阶次[9]。

图1 分数阶PIλDμ控制系统结构框图
由图1可得,分数阶PIλDμ控制器的传递函数为
(1)
式中:积分阶次λ与微分阶次μ分别满足0<λ<2、0<μ<2。控制信号在时域下的表达式为
u(t)=Kpe(t)+KiD-λe(t)+KdDμe(t)
(2)
由式(2)可知,当λ=μ=0时,为P控制器;当λ=1,μ=0时,为PI控制器;当λ=0,μ=1时,为PD控制器;当λ=μ=1时,为整数阶PID控制器[10]。
2 神经网络分数阶PID控制器
2.1 BP神经网络的构建
神经网络学习算法本质上就是求解被控对象误差函数最小值问题,可选用“最速下降法”,沿误差函数的负梯度方向实现权系数修正[11]。根据运行状态,调节分数阶PIλDμ控制器的5个参数,直到控制系统的误差达到最小,使输出层神经元的输出状态对应为分数阶PIλDμ控制器的5个参数[12]。通过神经网络的自学习以及加权系数的智能调整,最终使被控对象的控制效果达到最佳状态。本文采用的BP神经网络结构如图2所示。

图2 BP神经网络系统结构图
图2中,输入信号为系统输入信号r、系统输出信号y、误差信号e以及偏差信号l;相应的输出信号为分数阶PIλDμ控制器的参数Kp、Ki、Kd、λ和μ。
网络输入层输入输出公式为
(3)
式中:输入变量个数M取决于被控系统的复杂程度[13]。本文M=4。
网络隐含层的输入和输出分别为
(4)

隐含层神经元的活化函数取正负对称的Sigmoid函数
(5)
即网络输出层的输入和输出分别为
(6)
输出层的5个输出分别与分数阶PIλDμ控制器的Kp、Ki、Kd、λ和μ相对应。因为这5个参数都是取正数,因此输出层的活化函数选取非负的Sigmoid函数[14]
(7)
取性能指标函数如下
(8)
按照梯队下降法修正网络的权系数,即按E(K)对加权系数的负梯度方向进行搜索调整,并且附加一个惯性项[12]
(9)
式中:η为学习效率;α为惯性系数。
根据上述分析,可得网络输出层权的学习算法为
(10)
同理,可得隐含层加权系数的学习算法
(11)

2.2 BP神经网络分数阶PIλDμ控制器
BP神经网络分数阶PIλDμ控制器结构图如图3所示。
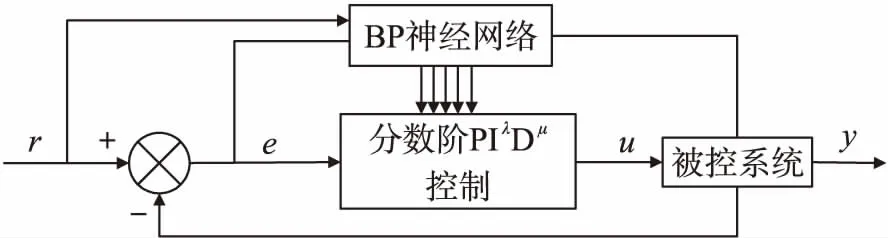
图3 基于BP神经网络的分数阶PIλDμ控制器结构图
分数阶PIλDμ控制器的神经网络算法流程如下:
(1)初始化。确定BP网络的结构并给出各神经层的加权系数初始值W选定学习率和数。
(2)采样得到控制器的信号rin(k)和yout(k),计算此时的误差error(k)=rin(k)-yout(k)。
(3)计算神经网络各层神经元的输入和输出,输出的5个参数即为Kp、Ki、Kd、λ和μ。
(4)根据式(2),计算分数阶PIλDμ输出u(k)。
(5)根据式(10)和式(11)进行神经网络学习,突触权值在线调整,最终实现Kp、Ki、Kd、λ和μ参数的最优化。
(6)置k=k+1,返回步骤(2)直到控制器的误差最小。
3 实验仿真分析
为验证本文设计算法的有效性,分别选取整数阶和分数阶控制对象进行实验仿真。首先选取整数阶为被控对象,其传递函数如下
(12)
系统G1(s)开环阶跃响应曲线如图4所示。

图4 系统G1(s)开环阶跃响应曲线
采用文献[15]设计的自适应差分进化算法整数阶控制器为Gk1(s),分数阶控制器为Gk2(s)
(13)
采用文献[7]设计的人工蜂群算法进行参数整定得到的控制器Gk3(s)为
(14)
应用本文算法进行参数整定得到分数阶PIλDμ控制器为
(15)
图5为被控系统G1(s)在控制器Gk1(s)、Gk2(s)、Gk3(s)和Gk4(s)分别作用下的阶跃响应曲线。从图中可看出,和其他3种控制器相比,本文设计的分数阶PIλDμ控制器具有较好的调节时间和稳定性。
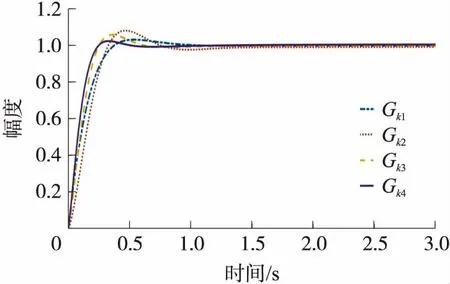
图5 G1(s)在几种控制器下的阶跃曲线
G1(s)在不同控制器下的性能指标,如表1所示。

表1 G1(s)在不同控制器下的性能指标
从表1可以看出,对于整数阶被控系统,本文设计的控制器减少了上升时间和调节时间,降低了超调量和稳态误差,提高了系统的稳定性。
其次,选取分数阶控制对象,进行实验仿真,其传递函数如下[15]
(16)
G2(s)系统的开环阶跃响应曲线如图6所示。

图6 系统G2(s)开环阶跃响应曲线
文献[1]中设计的分数阶PIλDμ控制器Gp1(s)为
(17)
文献[7]中采用人工蜂群方法设计的分数阶控制器Gp2(s)
(18)
文献[15]中采用改进差分进化方法设计的分数阶控制器Gp3(s)为
(19)
采用本文方法得到的分数阶PIλDμ控制器Gp4(s)为
(20)
被控制系统G2(s)在Gp1(s),Gp2(s),Gp3(s)和Gp4(s)4种控制器下的阶跃响应曲线,如图7所示。
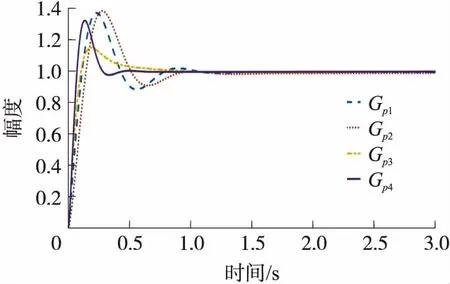
图7 G2(s)在几种控制器下的阶跃曲线
由图7可以看出,针对G2(s)分数阶系统,相比于文献[1]、文献[7]和文献[15]的方法,本文设计的分数阶PIλDμ控制器具有超调量小、上升时间短、稳定性高的优点。
Gp2(s)在不同控制器下的性能指标,见表2。
从表2中可以看出,Gp4(s)控制器在上升时间、调节时间等方面比其他控制器的控制效果好。被控系统G2(s)在开环控制、幅值裕度和相角裕度算法、人工蜂群方法算法以及神经网络算法控制下的伯德Bode图如图8所示。

表2 Gp2(s)在不同控制器下的性能指标
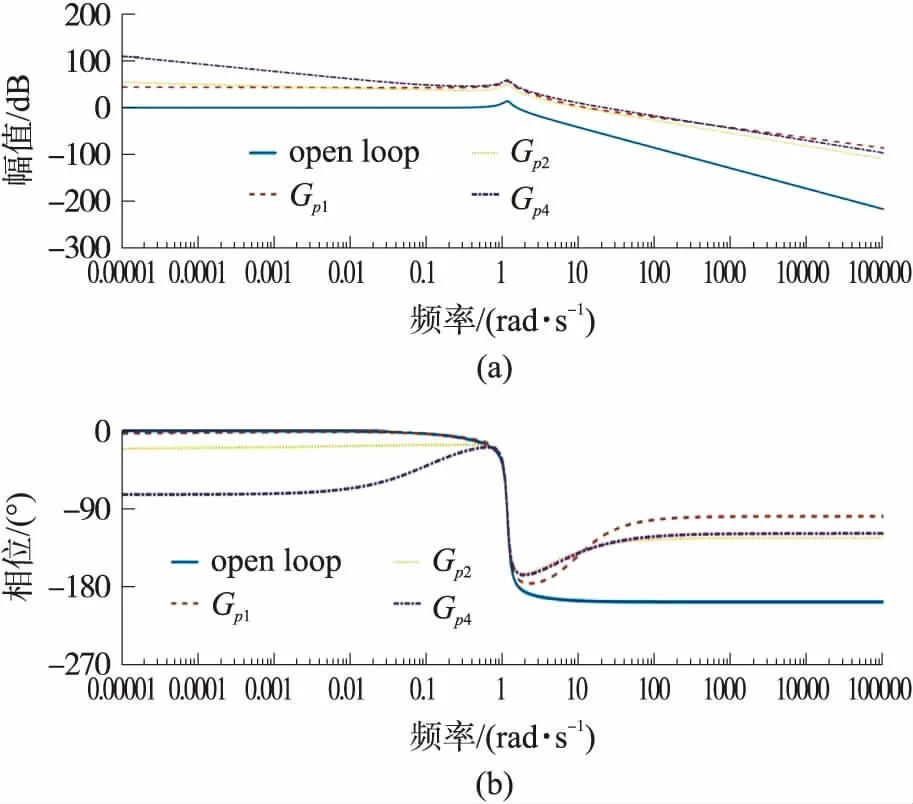
图8 G2(s)在不同响应下的Bode图
从图8可以看出,被控系统在本文设计控制器作用下的相角裕度比文献[1]中设计的要大。
4 结束语
由于传统的PID控制器控制效果不太理想以及分数阶PIλDμ控制器可调参数多,使得分数阶PIλDμ控制器参数整定的难度变大。因此,本文提出了一种基于BP神经网络与分数阶PIλDμ控制器相结合的方法。实验表明,当被控对象为整数阶系统时,该控制器具有较好的调节时间和稳定性;当被控对象为分数阶系统时,该控制器具有超调量小、上升时间短、稳定性高等优点。总之,相比于其他整定方法,该方法在系统的控制精度和控制效果等方面具有优越性,仿真结果验证了所提方法的有效性。
猜你喜欢
煤气与热力(2021年12期)2022-01-19
中国科技纵横(2021年22期)2022-01-08
汽车维修与保养(2021年11期)2021-03-11
环球时报(2020-08-11)2020-08-11
沈阳工业大学学报(2020年3期)2020-06-03
电子技术与软件工程(2020年17期)2020-02-02
电子制作(2019年13期)2020-01-14
筑路机械与施工机械化(2014年4期)2014-03-01
汽车与新动力(2014年5期)2014-02-27
