
一种人形机器人气动导航主动控制系统
2021-09-16 07:44李伟锋张跃进朱文慧
液压与气动 2021年9期
李 峰,李伟锋,张跃进,朱文慧,岳 云
(1.郑州经贸学院 智慧制造学院,河南 郑州 450007; 2.中原工学院 电子信息学院,河南 郑州 450007;3.郑州经贸学院 公共教学部,河南 郑州 450007; 4.郑州宇通集团有限公司,河南 郑州 450007)
引言
人形机器人是现代科技发展的重要产物,随着人类社会的不断发展,人们对人形机器人的发展提出了更高的期望。期望机器人智能化程度更高,能在相对较大的范围内运动,执行特定的任务,同时具备一定的对环境的适应能力,这就要求对人形机器人能够进行主动导航控制[1-5]。近年来,我国北斗导航系统的完善和5G移动通信技术的迅速发展,也进一步支撑了人形机器人导航控制技术的发展[6-10],而通过建立人形机器人运动学模型,得到人形机器人的导航定位解,将气动控制应用于人形机器人导航,实现人形机器人位姿规划,将人形机器人气动导航运行变为现实却未有实现[11-12]。为了解决目前人形机器人主要靠人工导航,导航智能程度较低,自适应程度不高的问题,通过人形机器人运动规律分析,建立了人形机器人运动数学模型,将气动技术应用于人形机器人导航,研发了人形机器人气动导航主动控制系统。通过仿真分析和实验研究,验证了系统的合理性、有效性,为进一步提高人形机器人人工智能水平奠定良好基础。
1 气动导航主动控制系统总体方案设计
人形机器人气动导航主动控制系统如图1、图2所示,主要包括人形机器人、北斗导航器、位姿规划模块、控制柜、气动电磁阀、针形气缸等部分组成。采用samkoon触摸屏作为人机界面实现导航数据设置、输入;通过PLC作为中央处理器自动生成机器人移动轨迹、路线;通过气动电磁阀、针形气缸发出信号,借由无线通讯设备控制机器人直接动作;通过微机作为机器人整体运行状况监测系统;机器人在上位机STEP 7Micro/WIN SMART软件上使用STL编程语言,将控制算法程序化,通过控制程序控制中间控制器,由中间控制器发出信号控制机器人的整体运行。
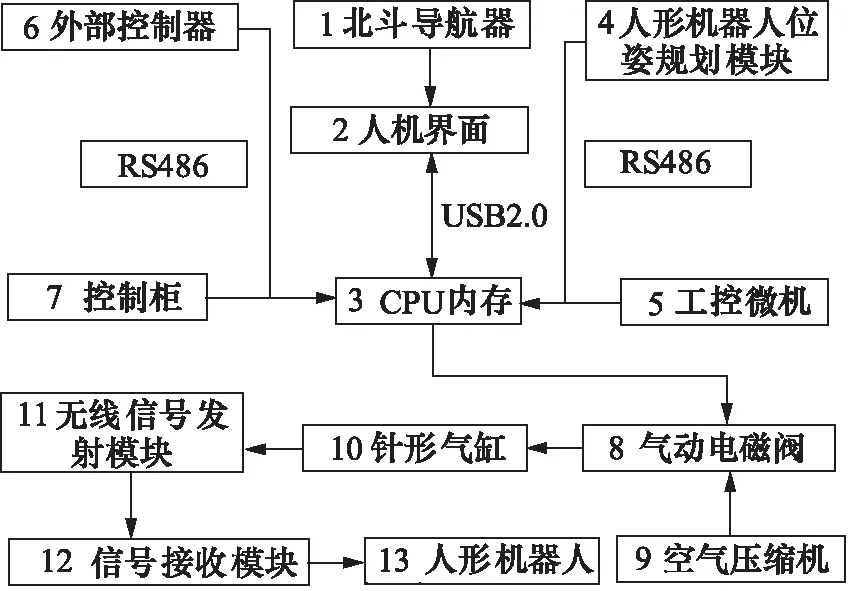
图1 控制系统硬件框图
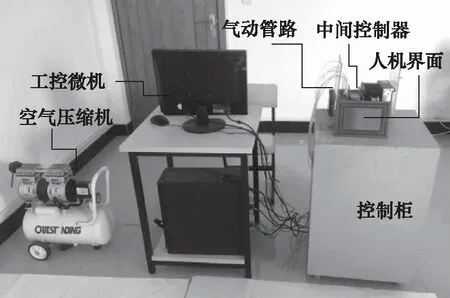
图2 人形机器人气动导航主动控制系统实物图
系统采用的人形机器人如图3所示,主要由机器人帽、头部、手部、腰部、胯部、足部组成。机器人通过腰部冰河北斗导航仪为机器人导航定位,该导航仪通过15星定位,可实时反馈机器人所在位置。
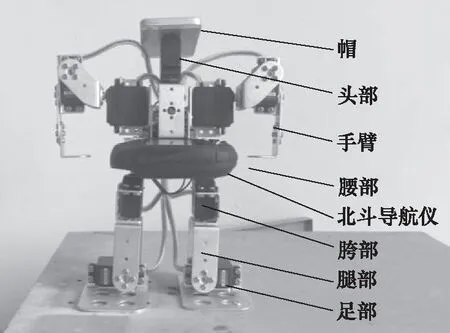
图3 人形机器人主要结构
2 系统气动回路图
气动导航主动控制系统气动回路由空气压缩机为气动动力源,如图4所示,经截止阀、过滤器,通过减压阀减压后供向各分支气路,按照主动控制系统导航控制算法设计,自动控制二位二通电磁换向阀,向各支路针形气缸供气,由各针形气缸控制人形机器人遥操按键,完成人形机器人导航。
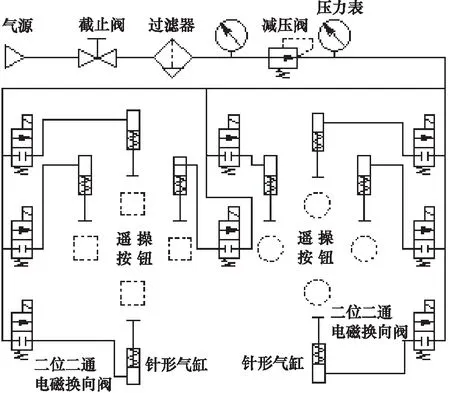
图4 气动导航主动控制系统气动回路图
3 气动导航控制算法设计
如图5所示,人形机器人两脚与机器人纵轴y机之间的夹角α为转向角,y机与地面坐标系y地之间的夹角ψ为航向角。两脚连线的垂直中心线即机器人身体的中心线为y机,y地为正北方向。
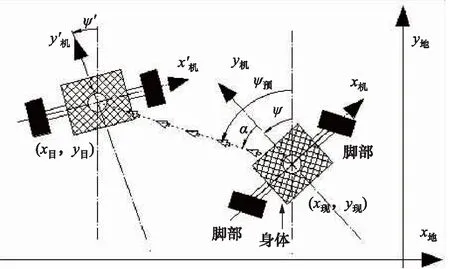
图5 人形机器人移动模型
令机器人现坐标为(x现,y现),目的坐标(x目,y目),移动过程中的机器人的航向角为ψ预,则ψ预可以由现坐标和目标坐标得到:
ψ预=-tan-1[(x目-x现)/(y目-y现)]
(1)
y目=y现+s·cosψ预=y现+ν机·Δt·cosψ预
(2)
x目=x现-s·sinψ预=x现-ν机·Δt·sinψ预
(3)
ψ预=ψ+α=ψ+ω机·Δt
(4)
式中,ν机—— 机器人的行走速度
ω机—— 机器人的航向调整角速度
Δt—— 时间间隔
s—— 机器人Δt时间内的位移
因为机器人的移动和航向调整需要通过控制信号进行控制,控制人形机器人完成一定的航向调整和位移调整,结合人形机器人控制原理,则:
ψe=-tan-1[(xg-xc)/(yg-yc)]=ψc+α
(5)
s={[(xg-xc)+(yg-yc)]∧0.5}
(6)
其中,(xc,yc)为现坐标,(xg,yg)为目的坐标,现坐标和目的坐标都通过北斗导航仪得到,采用北斗导航系统下国家2000坐标系坐标表示,ψc,ψe为机器人初始、目标位置姿态;由于人形机器人实际行走与理论行走会出现一定的偏差,为便于后期优化运动轨迹,令:
s=kx·{[(xg-xc)+(yg-yc)]∧0.5}≈nx·Δs
(7)
α=kz·(ψe-ψc)≈nz·Δα
(8)
机器人航向调整时需要调整航向角度,姿态调整时也需要调整姿态角度,人形机器人转向时存在角度偏差,因此设定角度偏差增益kz,同样,机器人位移调整时设定位移偏差增益kx,后期可通过调整kz,kx进一步提高导航精度。nz为给定机器人转向信号数,nx为给定机器人直线行走信号数。Δα表示人形机器人的航向调整角速度ω机,即机器人每个转向信号可转角度;ν机表示人形机器人的直线行走速度;s为单个位移调整信号机器人位移。
4 控制算法实现
4.1 控制流程
借助于人形机器人移动数学模型,通过计算机STL语言将数学模型转换成易于实现中央处理器控制的程序,经由气动导航主动控制系统回路可实现人形机器人主动导航控制。如图6所示,该人形机器人气动导航主动控制系统在导航相关参数确定的情况下,输入目标北斗坐标、姿态和现在北斗坐标、姿态,系统自动实现航向、姿态规划,并生成导航轨迹路线,然后主动发出信号,控制被导航人形机器人完成航向调整,位移实现和位姿调整,大大提高了人形机器人的智能化程度。
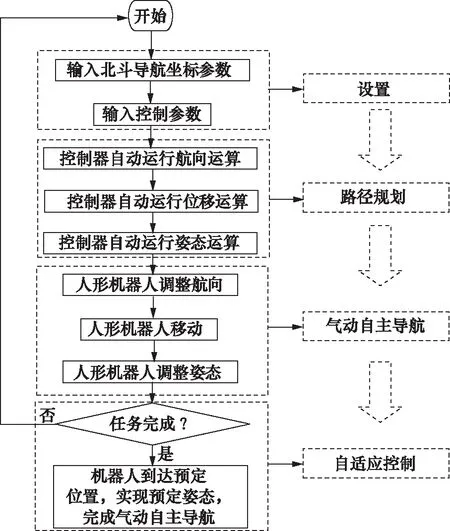
图6 机器人气动导航主动控制流程
人形机器人气动导航主动控制是一个包含了轨迹计算、轨迹规划、轨迹实现、姿态调整的复杂系统,涉及参数较多,根据人形机器人气动导航控制算法设计,结合人形机器人实际运动状况,系统主要参数见表1。
表1中(xc,yc)为北斗系统下国家2000坐标系中机器人现在所在的坐标,(xg,yg)为国家2000坐标系中目标坐标,ψc为机器人初始位置姿态,Δα为人形机器人自身单个转向信号机器人可转角度,ψe为机器人到达目标位置后需要确定的姿态,Δs为单个转向信号机器人直线行走距离,kx,kq,kz为机器人直线行走、位姿调整、转向调整偏差增益,Tz,Tx为根据实验测得的机器人每信号转向、直线动作所需时间间隔。
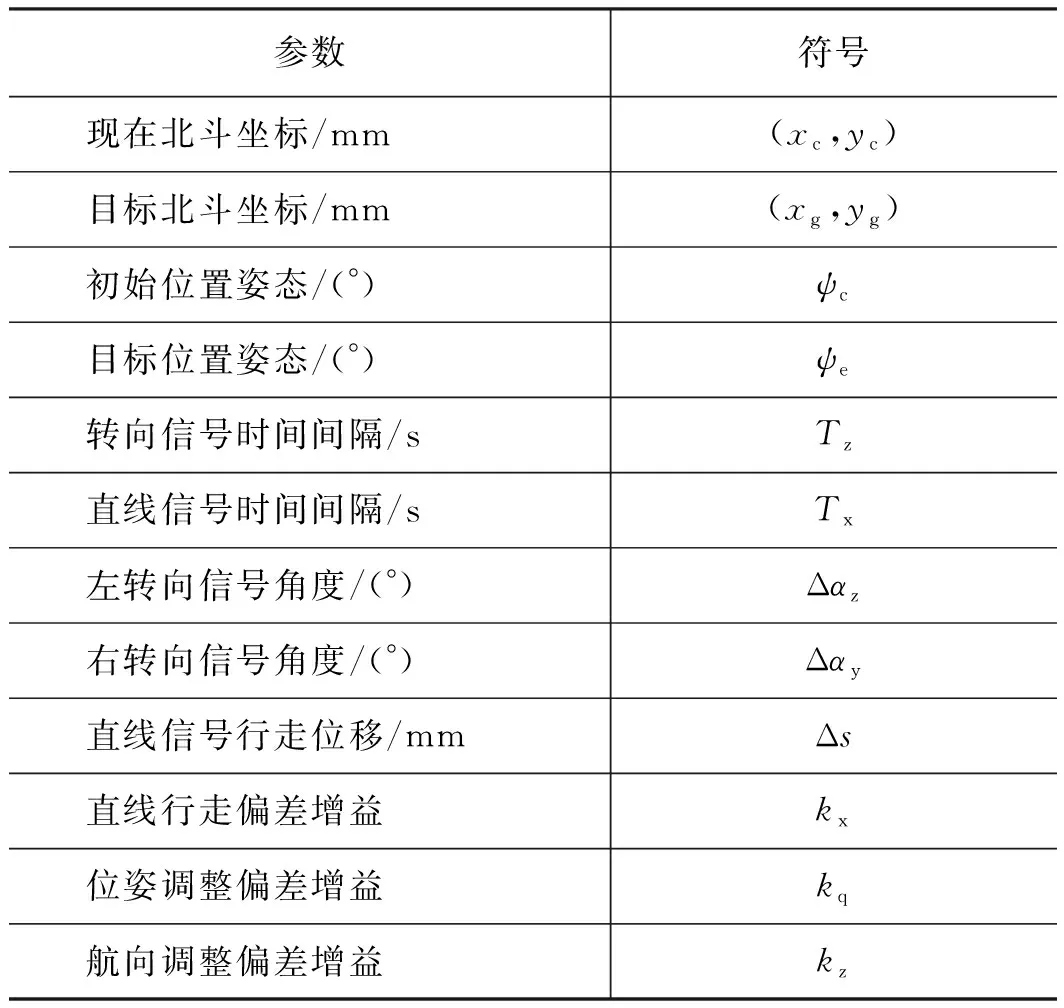
表1 导航控制主要参数
4.2 主要运动控制原理
图7为结合人形机器人气动导航控制算法和导航控制相关参数设计的气动导航主动控制原理,系统先将不同的数据、参数存储到不同的地址,然后按照图6机器人气动导航主动控制流程图完成人形机器人导航任务。从图7可以看出,气动导航主动控制原理主要包括参数输入模块、轨迹规划模块、动作生成模块。因篇幅限制,运动控制原理中只将nz规划模块、nx规划模块、nq规划模块子程序做了介绍,其他子程序不再赘述。
4.3 算法实现
根据图7人形机器人气动导航主动控制原理,结合图1,图2控制系统,即可实现人形机器人的导航控制。机器人气动导航系统启动后,导航参数复原;将人形机器人气动导航相关参数输入系统,机器人自动生成导航路线;主动控制器发出控制信号,对人形机器人进行导航。在前期导航相关参数已经确定的情况下,系统只用输入国家2000坐标系下坐标和现在姿态、目标姿态,中央处理器即可自动规划航向、轨迹,并发出信号控制机器人实现动作,系统自动化水平更高,智能化程度更好。
5 实验结果分析
人形机器人移动模型和气动导航控制算法的合理性,需要通过仿真实验进行验证;人形机器人气动导航主动控制系统的正确性、有效性需要通过实验进行验证。
5.1 实验参数
根据表2参数,将北斗导航系统测得的国家2000坐标系下初始坐标及设定的目标坐标、姿态、前期测得的人形机器人运行相关基本参数通过人机界面输入系统,由中央处理器根据图7规划出航向、轨迹、姿态,表2中主要控制信号参数航向信号nz、直线信号nx、终点位姿信号nq为系统自动生成,生成的控制信号参数通过气动回路将航向、轨迹、姿态参数转化成控制信号通过无线通讯设备发送给人形机器人即可实现人形机器人导航控制。表2中位移增益kx、位姿增益kq、航向增益kz在前期未知环境中运行时暂定为1,后期可根据导航情况进行调整,以提高导航精度。系统将中央处理器和气动控制系统结合,实现了人形机器人的运动航向、姿态、轨迹的自动生成,大大地提高了机器人控制的智能化水平、自适应程度。
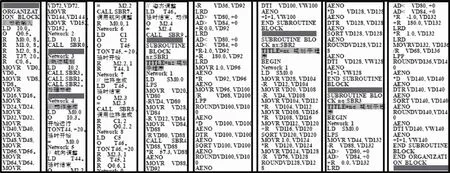
图7 机器人气动导航主动控制原理
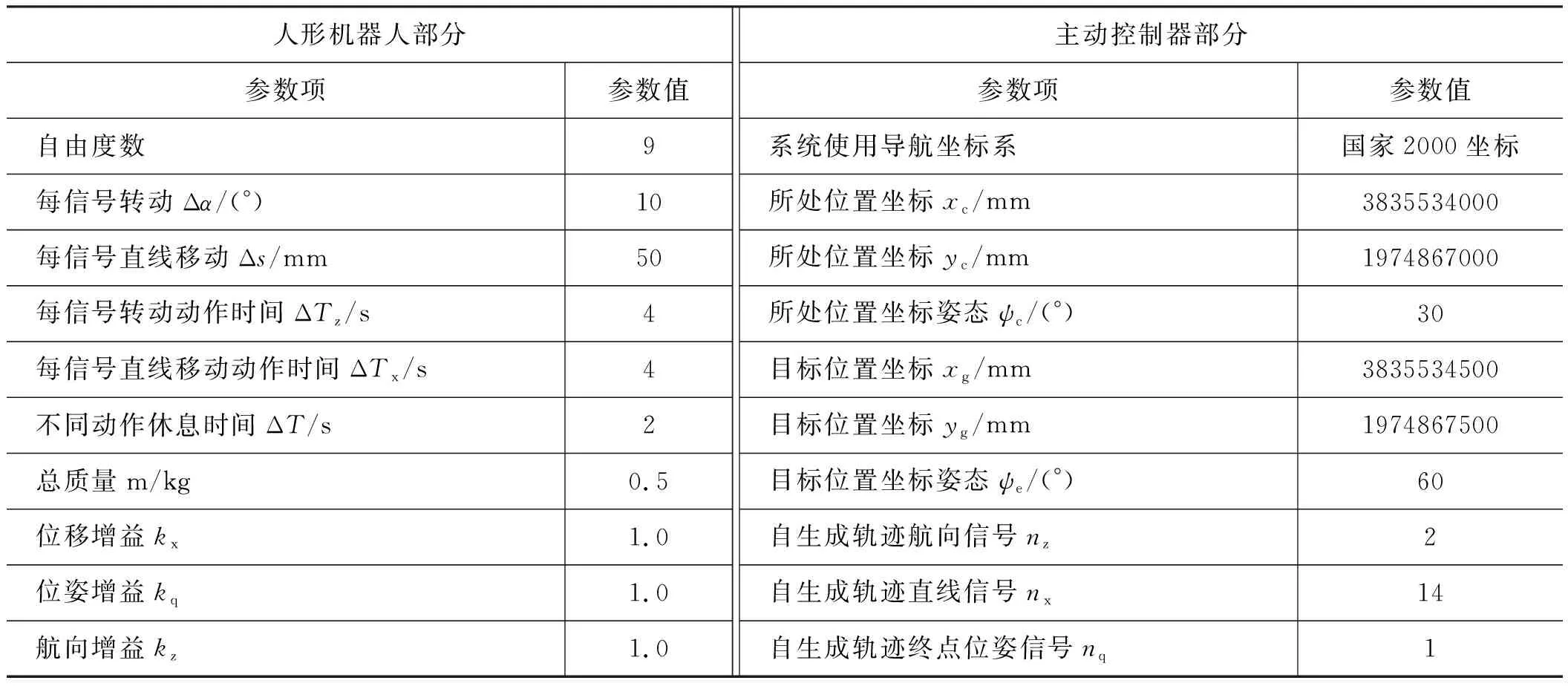
表2 机器人导航实验相关参数
5.2 人形机器人气动导航仿真分析
图8中p1为初始点,p2为理想轨迹终点,p3为理论轨迹终点。由图8所示理想与理论轨迹可以看出,理想行走轨迹trail 1与理论轨迹trail 2都为直线,但两者相差一定角度,约相差5°,这主要是因为机器人气动导航系统中人形机器人每信号转动角度为10°,造成机器人行走的航向偏差,是机器人本身的控制精度偏差,后期可以通过提高机器人转向精度,减小每信号转向角度、改设航向增益的方法进行提高。可以看出,理论上,根据导航算法,最终机器人到达目的地后坐标位置和理想位置之间偏差较小,x坐标相差15 mm,y坐标相差8 mm,整个导航过程中理论情况逼近理想情况,从仿真结果看,人形机器人气动导航主动控制算法理论上可以实现人形机器人的导航控制。
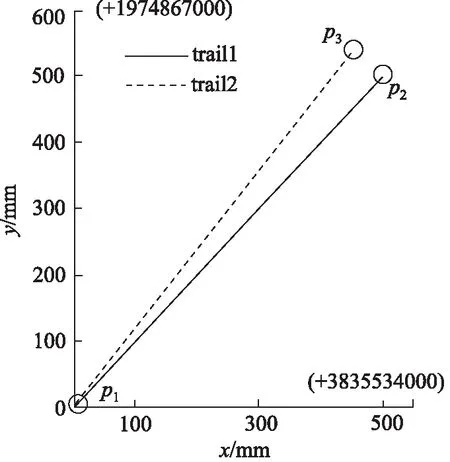
图8 导航理想及理论轨迹
5.3 人形机器人导航实验
图9中trail1和trail3为理想情况下人形机器人的轨迹及导航实验机器人的行走轨迹。图10中trail4为优化后实验轨迹。其中初期实际轨迹为系统中各增益暂定为1情况下的导航结果,优化后实际轨迹为经过初期实验分析优化增益后的导航结果。
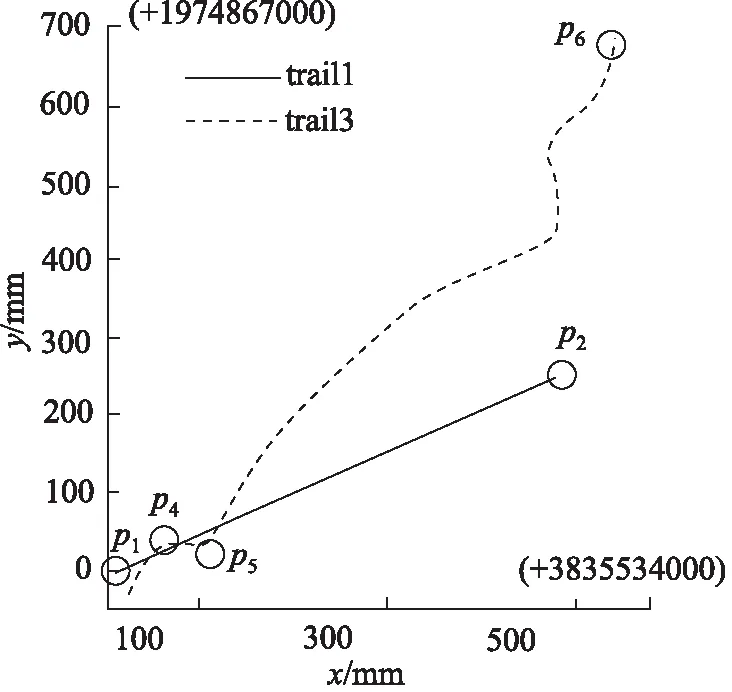
图9 理想与实验初期实际轨迹
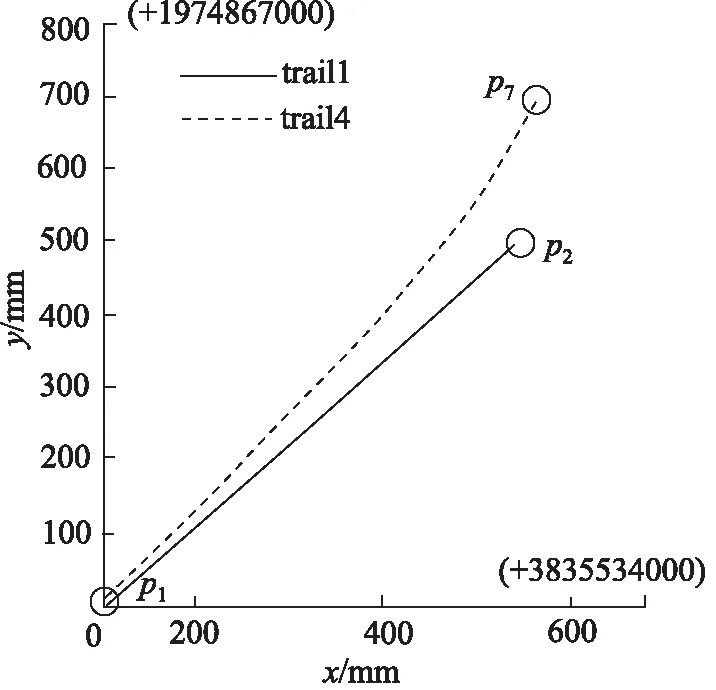
图10 理想与优化后实验轨迹
如图9所示,p1为初始点,p2为理想轨迹终点,p6为实验轨迹终点。实验中,由于局部地面摩擦系数变化较大,造成部分轨迹点发生较大错动,如图中p4至p5点。另外由于机器人行走中误差的积累,机器人最终到达目的地后与设定目标相差比理论较远,从图中看目标坐标p2和初始坐标p1的距离约为700 mm,实际经系统导航机器人行走后两者距离为1501 mm,而p2和p6的x坐标相差68 mm,y坐标相差889 mm,两者距离891 mm,可见后期偏差积累导致的增大是较大的。从图中还可以看出,机器人实际行走路线相对于理想行走曲线偏西北,推得机器人本身行走时也有系统偏差,导致机器人直线行走时相对与理想路线偏北。根据理想轨迹、实验初期实际轨迹对比可以看出,人形机器人经过气动导航系统导航后,在一定范围内,位移偏差较大,因初期直线行走偏差增益kx,位姿调整偏差增益kq,转向调整偏差增益kz在前期均设置为1,整体航向、姿态偏差不大,而位移偏差较大,所以理论上可通过优化直线行走偏差增益kx的方法优化机器人实际气动导航行走路线,因前期目的坐标和初始坐标的距离为707 mm,但实际经系统导航机器人行走后两者距离为1501 mm,可设置偏差增益kx为1501/707=2.1,将kx输入气动导航系统进行优化实验。
如图10所示,p1为初始点,p2为理想轨迹终点,p7为优化后实验轨迹终点。在经过优化机器人气动导航控制系统中直线行走偏差增益,将kx优化为2.1后,机器人实际行走路线与理想行走路线相符度更高,实际经系统导航机器人行走后p1和p2两者距离为868 mm,而p2和p7的x坐标相差20 mm,y坐标相差193 mm,两者距离194 mm。明显可以看出,优化后轨迹与实验初期轨迹相比,与理想轨迹重合度更高,导航效果更好,这说明系统可以通过优化相关参数的方法提高人形机器人气动导航准确度,提高人形机器人导航效果。
如图11所示,curve 1为理想轨迹与理论轨迹的位移偏移,curve 2为初期实验与理想轨迹的位移偏差,curve 3为优化偏差增益后实验与理想轨迹的位移偏差。经导航系统自动规划生成的理论轨迹与理想轨迹位移偏移量较小,在0~100 mm之间,而且偏移量成线性变化,这是因为理论轨迹与理想轨迹的偏移量主要是由系统导航算法引起的,不因运行环境影响。实际轨迹位置与理想轨迹位置偏移量较大,最大在800~900 mm之间,整个过程中偏移量不断增大,这说明人形机器人本身有系统误差,后期应不断将系统误差降低。但中间有如p8~p11等特殊点存在,而且初期、优化后偏移量变化趋势基本相同,优化后偏移量大幅度降低。经分析,上述p8,p9轨迹点为航向调整点,p10,p11为姿态调整点,理想状况下人形机器人原地调整姿态、航向时位置坐标不会发生变化,但实际上机器人较大的偏移量正是因为人形机器人本身的结构问题,在姿态、航向调整时引入较大的偏移量,从图11可以看出,经过优化后,人形机器人实验轨迹与理想轨迹位置偏移量大幅度下降,位移偏差降低至200 mm附近,人形机器人实际轨迹与理想轨迹逼近程度大幅度提高。通过以上实验结果可以看出,所提出的人形机器气动导航控制算法是合理的,基于北斗导航的人形机器人气动导航主动控制系统能够实现人形机器人的导航控制,证明了所研发的人形机器人气动导航主动控制系统的正确性。
图11 理论、初期、优化后实验轨迹与理想轨迹位置偏移量
6 结论
为提高人形机器人导航控制智能化程度,针对人形机器人的特点,研发了人形机器人气动导航主动控制系统,通过实验验证、优化、分析,得出以下结论:
(1) 建立的人形机器人的运动模型可应用于人形机器人气动导航系统,提出的人形机器人气动导航运动控制原理可很好地提高人形机器人的人工智能水平;
(2) 搭建的人形机器人气动导航主动控制系统可实现人形机器人的自主导航,能够将人形机器人气动导航主动控制成为现实;
(3) 系统研发、分析过程为后续人形机器人任务平台的研发提供了理论依据和现实参考。
猜你喜欢
天然气与石油(2022年4期)2022-09-21
舰船科学技术(2022年10期)2022-06-17
鸭绿江·华夏诗歌(2021年7期)2021-09-13
北京航空航天大学学报(2021年6期)2021-07-20
新世纪智能(高一语文)(2021年3期)2021-07-16
小学科学(学生版)(2019年7期)2019-08-01
民用飞机设计与研究(2019年4期)2019-05-21
测控技术(2018年9期)2018-11-25
疯狂英语·爱英语(2018年12期)2018-08-13
电子制作(2017年24期)2017-02-02
